Сигнализация в системах аэп
1. Контрольная.
2. Технологическая.
3. Аварийная.
Контрольная сигнализация
С
Рисунок
2.45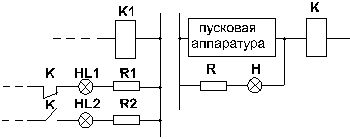
Технологическая сигнализация
Указывает последовательность операций, совершаемых системой АЭП (см. рисунок 2.46).
Аварийная сигнализация
У
Рисунок
2.46 Рисунок 2.47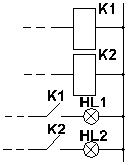
Принцип построения щита аварийной сигнализации – это принцип темного табло, т.е. ни одна из ламп при нормальном режиме работы не должна гореть.
Сигнализации бывают:
– световая;
– звуковая;
– указательная.
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 6 ГРУППА ФИО ДАТА ……………….
1. Одноконтурная система АЭП с отрицательной обратной связью по скорости и упреждающим токовым ограничением
( принцип ограничения тока с помощью “токовой стенки”, схемное решение, скоростные характеристики, область применения).
Вместо нее вроде как двухконтурная система…
2. А — регулятор(схемная реализация, передаточная функция, ЛАЧХ, временные диаграммы).
3. Максимально- и минимально-токовая защиты (назначение, чем осуществляются).
1 ???????????????????????????????????????????????????????????????????????
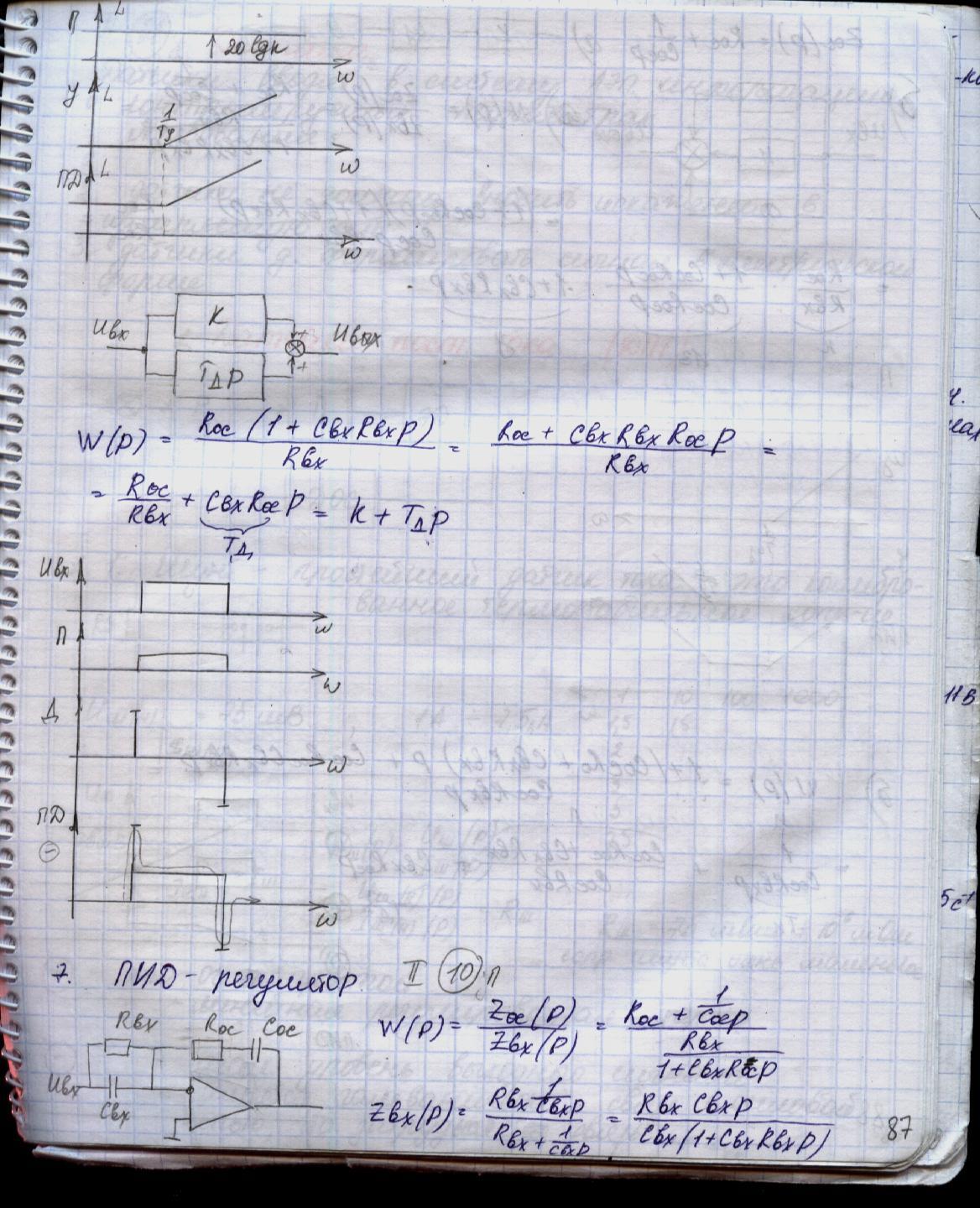
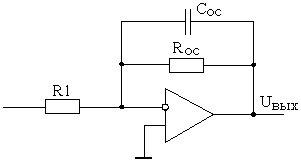
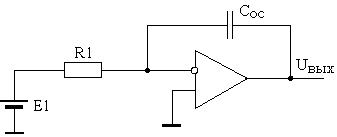
2. А-регулятор
В соответствии с рисунком 3.61а, передаточная функция А-регулятора
![]() ;
;
ZВХ(р) = R1;
![]() ,
,
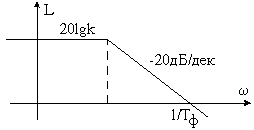
где Тф= RocCoc.
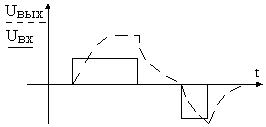
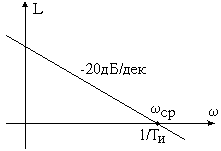
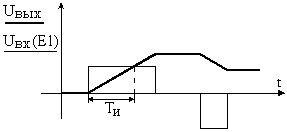
Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.61б, в, соответственно.
НЧ: Тф<1.
а)
б)
в) Рисунок
3.61
Максимально-токовая и минимально-токовая защита
Максимально-токовая защита
Назначение – защита от токов к.з.
Осуществляется плавкими предохранителями, автоматическими выключателями с максимально-токовыми расцепителями, реле максимального тока.
Защита АД с КЗР (Iп)
с помощью плавкой вставки
а) нормальный пуск (tп< 5с)
Iвст.н = 0,4Iп;
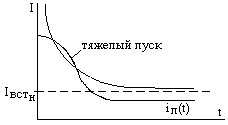
б) тяжелый пуск (tп10с)
Iвст.н= 0,6Iп = 3Iн.
Плавкая вставка при длительных перегрузках не защищает (см. рисунок 2.19).
Ч
Рисунок 2.19
Рисунок 2.20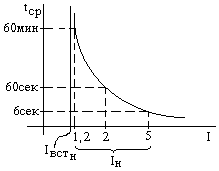
с помощью автоматических выключателей и реле максимального тока
IУ= (1,2…1,3)Iп.
Защита АД с ФР и ДПТ (I1 2,5 Iн)
2.1) с помощью плавких вставок (рисунок 2.21)
Iвст1,25 Iн;
Рисунок 2.21
2.2) с помощью автоматов и реле максимального тока (рисунок 2.22)
Iу1,25 I1.
С
Рисунок 2.22
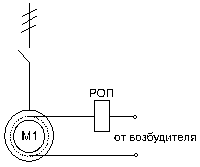
Минимально-токовая защита
Защита СД и ДПТ от обрыва цепи обмотки возбуждения. Осуществляется с помощью реле минимального тока (РОП – реле обрыва поля), которое включается в цепь контролируемой обмотки (см. рисунок 2.23).
Рисунок
2.23

ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 7 ГРУППА ФИО ДАТА ……………….
1. Одноконтурная система АЭП с положительной обратной связью по току (схема, скоростные характеристики, область применения)
2. И — регулятор(схемная реализация, передаточная функция, ЛАЧХ, временные диаграммы).
3. Управление в функции скорости (+ и —, область применения).
1.
Регулирование по возмущению (ПОС), либо по отклонению (ООС) может осуществляться регулированием по току (см. рисунок 4.3).
Uy= (UзтUдт)крт,
где (+) – для ПОС;
(–) – для ООС.
Еп = Uy кп= Едв+ I(Ra+ Rп);
Е = сеФн;
Uдт = Iкдт = I(Ra + Rп).
Е = Uyкп – I(Ra + Rп) = [Uзт I(Ra + Rп)]крткп – I(Ra + Rп) =
= Uзткрткп – I(Ra + Rп)(1 крткп)
![]() .
.
Положительная обратная связь по току (ПОС)
![]() .
.
![]() ;
;
![]() .
.
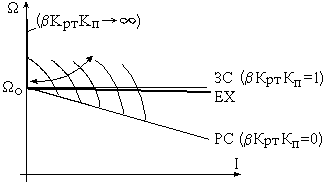
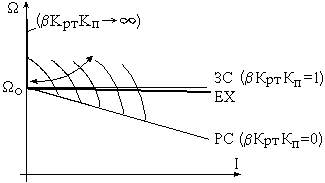
а) крткп= 0![]() ;
;
б) крткп= 1(+) ЗС= 0 – абсолютно жесткая характеристика;
в) крткп(+) ЗС–.
Положительная обратная связь по току делает характеристики более жесткими, чем те же характеристики в разомкнутой системе (см. рисунок 4.4).
Отрицательная обратная связь по току (ООС)
![]() .
.
а) крткп= 0![]() ;
;
б) крткп=(–) ЗС=.
Отрицательная обратная связь по току применяется для реализации мягких характеристик ЭП (см. рисунок 4.5).
Рисунок 4.4
Рисунок 4.5


В соответствии с рисунком 3.59а, передаточная функция И-регулятора
![]() ,
,
где
![]() ,
Z1= R1.
,
Z1= R1.
![]() ,
,
где Ти= CocR1,Cp = 1/Ти.
Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.59б, в, соответственно.
Физический смысл постоянной времени Тисостоит в том, что она численно равна времени, за которое выходной сигнал достигает уровня входного при нулевых начальных условиях.
И-регулятор и любой другой, имеющий интегрирующую часть, обладает свойством памяти (т.е. при нулевом входном сигнале выходной сохраняет накопленное к этому моменту значение).
а)
б)
в)
Рисунок 3.59
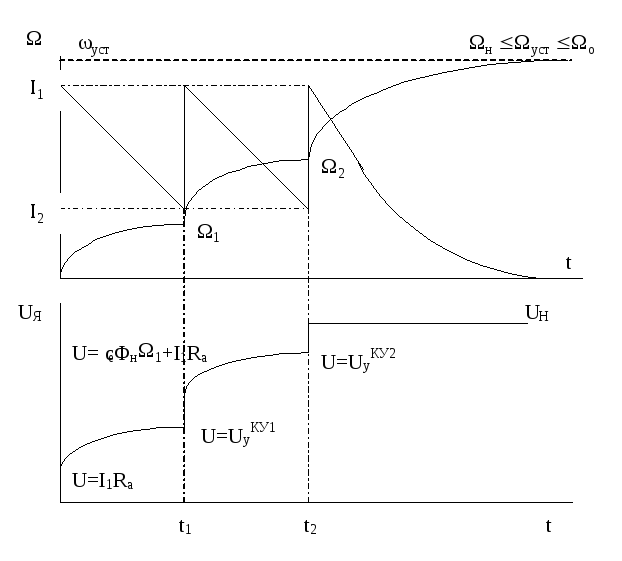
Для реализации этого способа требуется аппаратура, контролирующая скорость непосредственно или косвенно. Чаще контролируется косвенно по напряжению на якоре, по величине ЭДС ротора, по частоте тока ротора. Управление идет в функции UЯ, Eр, fр, s, но все в рамках функции скорости.
Схема пуска ДПТ
Т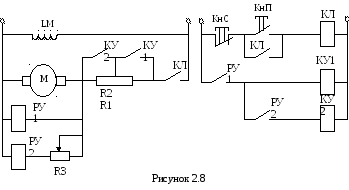 иповая
схема пуска ДПТ в функции скорости
представлена на рисунке 2.8, где приняты
обозначения: М – двигатель постоянного
тока; R1, R2 – ступени пускового реостата;
КУ1, КУ2, КЛ – контакторы ускорения и
линейный контактор; РУ1, РУ2 – реле
времени с отсчетом уставки; R3 –
дополнительное сопротивление для
изменения уставки реле РУ2; КнС, КнП –
кнопки Стоп, Пуск (SB1 SB2).
иповая
схема пуска ДПТ в функции скорости
представлена на рисунке 2.8, где приняты
обозначения: М – двигатель постоянного
тока; R1, R2 – ступени пускового реостата;
КУ1, КУ2, КЛ – контакторы ускорения и
линейный контактор; РУ1, РУ2 – реле
времени с отсчетом уставки; R3 –
дополнительное сопротивление для
изменения уставки реле РУ2; КнС, КнП –
кнопки Стоп, Пуск (SB1 SB2).
М
Рисунок 2.9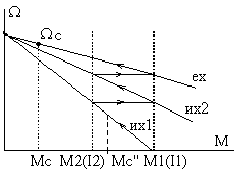
Достоинства схемы:
- простота схемного решения;
- возможность применения однотипных реле напряжения для двигателей разной мощности, но с одинаковым напряжением сети;
Недостатки:
- трудность настройки КУ на разные напряжения срабатывания;
- tп= f(Mс, J);
- возможна задержка пуска на промежуточной ступени и перегрев пускового резистора (Мс'>Мс). При моменте Мс''>Мсдвигатель остается работать на искусственной характеристике (установившийся режим).
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 8 ГРУППА ФИО ДАТА ………………..
1. Одноконтурная система АЭП с отрицательной обратной связью по току (схема, скоростные характеристики, область
применения)
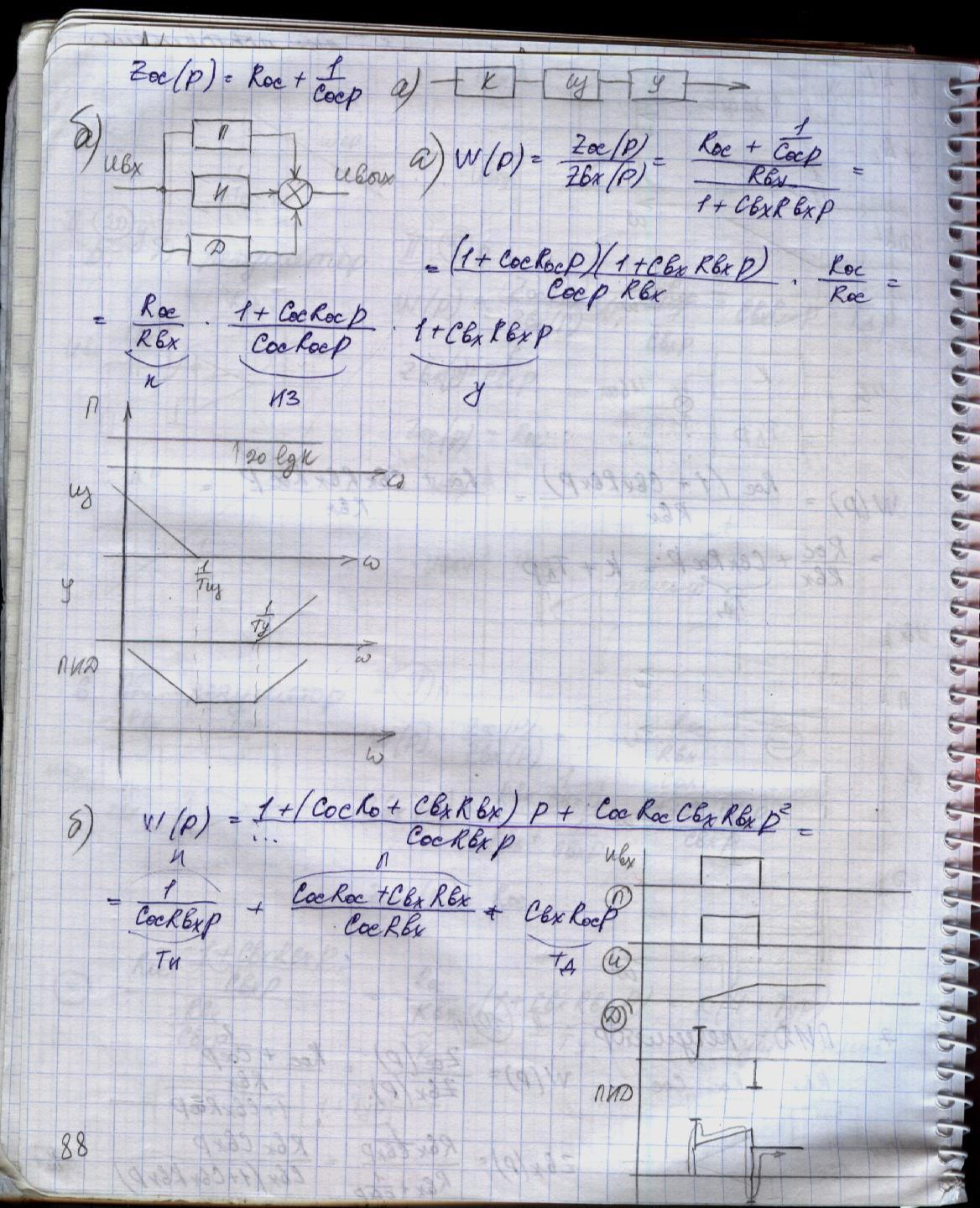
2. ПИД — регулятор(схемная реализация, передаточные функции для двух форм представления, ЛАЧХ, временные
диаграммы).
3Управление в функции времени (+ и —, область применения).
1.
Регулирование по возмущению (ПОС), либо по отклонению (ООС) может осуществляться регулированием по току (см. рисунок 4.3).
Uy= (UзтUдт)крт,
где (+) – для ПОС;
(–) – для ООС.
Еп = Uy кп= Едв+ I(Ra+ Rп);
Е = сеФн;
Uдт = Iкдт = I(Ra + Rп).
Е = Uyкп – I(Ra + Rп) = [Uзт I(Ra + Rп)]крткп – I(Ra + Rп) =
= Uзткрткп – I(Ra + Rп)(1 крткп)
![]() .
.
Положительная обратная связь по току (ПОС)
![]() .
.
![]() ;
;
![]() .
.
а) крткп= 0![]() ;
;
б) крткп= 1(+) ЗС= 0 – абсолютно жесткая характеристика;
в) крткп(+) ЗС–.
Положительная обратная связь по току делает характеристики более жесткими, чем те же характеристики в разомкнутой системе (см. рисунок 4.4).
Отрицательная обратная связь по току (ООС)
![]() .
.
а) крткп= 0![]() ;
;
б) крткп=(–) ЗС=.
Отрицательная обратная связь по току применяется для реализации мягких характеристик ЭП (см. рисунок 4.5).
Рисунок 4.4
Рисунок 4.5


ПИД-регулятор