

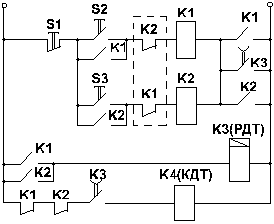
Технологические блокировки
Обеспечивают определенную последовательность работы схем.
Пример внутренней технологической блокировки – на рисунке 2.43. Реле времени КТ3 выполняет роль внутренней технологической блокировки (РДТ), которое запрещает включение контактора противоположного направления, пока не закончилось динамическое торможение.
П
Рисунок
2.44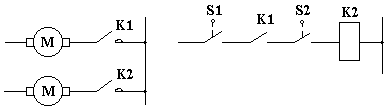
 Рисунок
2.43
Рисунок
2.43
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 5 ГРУППА ФИО ДАТА ……………….
1. Одноконтурная система АЭП с отрицательной обратной связью по скорости и отсечкой по току (схема, скоростные
характеристики, область применения).
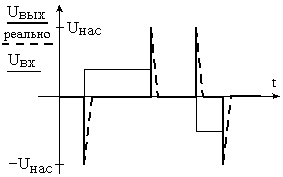
2. Д — регулятор(схемная реализация, передаточная функция, ЛАЧХ, временные диаграммы).
3. Способы автоматического управления процессами пуска, торможения, реверса. Сигнализация в релейно-контакторных
системах АЭП (виды, способы реализации).
1.Отрицательная обратная связь по скорости и отсечка по току
Рисунок
4.9
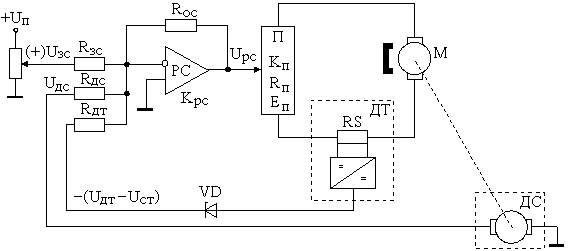
В рабочем диапазоне тока справедливы выражения для предыдущего случая, т.к. работает только одна обратная связь по скорости (см. рисунок 4.10).
б) I > Iотс, Uдт> Uст VD.
В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС:
- сигнал по скорости, который стремится сделать скоростную характеристику более жесткой;
- сигнал по току, который стремится сделать скоростную характеристику более мягкой.
Для получения требуемой характеристики должна преобладать ОС по току.
Uy= (Uзс– Uдс –Uдт+ Uст)крс;
Еп = Uукп = Е + I(Ra + Rп);
Е = сеФн;
Uдс=кдс;
Uдт =I(Ra+ Rп).
[Uзс –кдс–I(Ra+ Rп) + Uст]крскп= сеФн+ I(Ra+ Rп);
= 0–;
Рисунок
4.10

![]() .
.
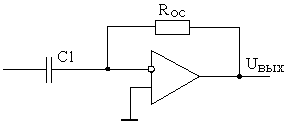
2. Д-регулятор
В соответствии с рисунком 3.62а, передаточная функция Д-регулятора
Zoc= Roc; Zвх= 1/C1p;
![]() .
.
Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.62б, в, соответственно.
а)
б)
в) Рисунок
3.62

В разомкнутых системах АЭП для пуска двигателей и асинхронных двигателей с фазным ротором должен быть реостатный способ, который позволяет быстро пустить (остановить) двигатель и ограничить броски тока. Схема ДПТ НВ и диаграмма сигналов при двухступенчатом пуске приведены на рисунках 2.1 и 2.2. Из диаграммы видно, что переключение ступеней реостата должно происходить в определенные моменты времени (t1, t2), при достижении определенной скорости (1,2) или при снижении тока якоря до определенного значения (I2), отсюда три способа управления:
управление в функции времени f (t);
управление в функции скорости f();
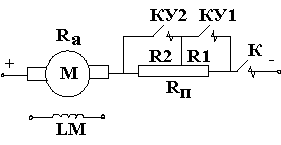
Рисунок 2.1
у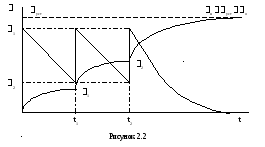 правление
в функции тока f (I).
правление
в функции тока f (I).
Таблица 1 Способы управления и область применения
|
Функция |
Аппаратура управления |
Область применения |
|
f(t) |
1) Реле времени на постоянном и переменном токе 2) Пневматические реле |
1) Пуск АД, ДПТ 2) Динамическое торможение |
|
f( |
1) Реле напряжения 2) Реле контроля скорости |
1) Пуск ДПТ на х.х. в одну ступень 2) Торможение противовключением АД с к.з. ротором 3) Пуск с синхронизацией СД |
|
f(I) |
Реле тока |
1) Двухзонный ЭП постоянного тока (ФФн) 2) Пуск с синхронизацией СД |
|
f(S) |
Конечные выключатели |
1) Автоматизация возвратно-поступательного движения 2) Защитные путевые блокировки |