1. Одноконтурная система аэп с отрицательной обратной связью по напряжению (схема, скоростные характеристики,
область применения).
2. И — регулятор (схемная реализация, передаточная функция, лачх, временные диаграммы).
3. Тепловая и нулевая защиты (назначение, чем осуществляются).
1. Отрицательная обратная связь по напряжению
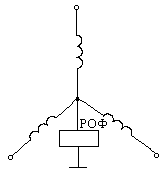
Система АЭП с отрицательной обратной связью по напряжению представлена на рисунке 4.1, где приняты обозначения: РН – регулятор напряжения; П – преобразователь; кпр =1 – коэффициент потенциального разделителя.
Рисунок
4.1
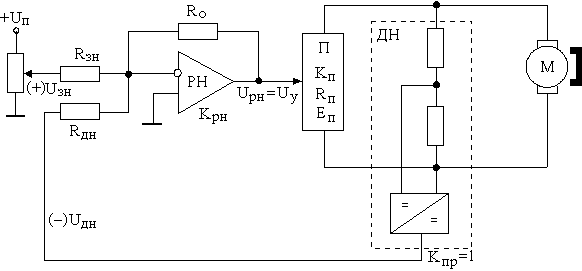
Проанализируем статический режим замкнутой системы и получим выражение для скоростной характеристики. Далее сравним жесткость этой системы с жесткостью естественной скоростной характеристики и характеристики разомкнутой системы.
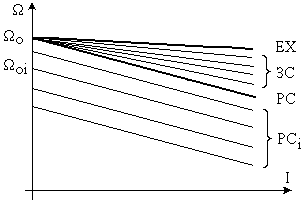
а) Естественная характеристика (ЕХ)
Uн= Е + IRa= ceФн+ IRa;
E = ceФн;
![]() .
.
б) Разомкнутая система (РС)
U = E + I(Ra+ Rп),
где Rп– сопротивление преобразователя.
![]() .
.
Uзн1ЗС= 7,73В, Uзн1РС= 0,37В,ЕХЗСРС.
![]() ;
;
![]() .
.
в) Замкнутая система (ЗС) по напряжению
Uy= (Uзн– Uдн)крн (если Rзн= Rдн);
Еп= Uyкп = Е + I(Ra + Rп), Е = сеФн;
Uдн = Uдкдн, (Uд = Еп – IRп = Е + IRa).
Е = Uyкп – I(Ra + Rп) = (Uзн – Uдкдн)кпкрн – I(Ra + Rп);
Е(1+крнкпкдн) = Uзнкпкрн – I(Raкрнкпкдн + Ra + Rп).
![]() ;
;
![]() ;
;
= oi+ЗС.
Анализ ЗС:
пусть крнкпкдн
ЗС = IRa/сеФн = ЕХ;
2) при крнкпкдн= 0 (разорвали связь, т.е. РС)
![]() .
.
Физический смысл действия отрицательной обратной связи по напряжению состоит в том, что она компенсирует падение напряжения в преобразователе и в идеале (при к1к2к3) обеспечивает питание двигателя как бы от источника с нулевым внутренним сопротивлением.
Статические характеристики системы АЭП с отрицательной обратной связью по напряжению представлены на рисунке 4.2.
Определим сигнал Uзн, который надо подать, чтобы получить сигнал на выходе.
![]() ;
;
![]() ;
;
![]() .
.
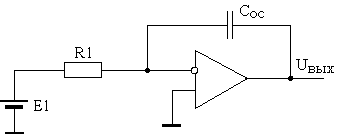
2. И-регулятор
В соответствии с рисунком 3.59а, передаточная функция И-регулятора
![]() ,
,
где
![]() ,
Z1= R1.
,
Z1= R1.
![]() ,
,
где Ти= CocR1,Cp = 1/Ти.
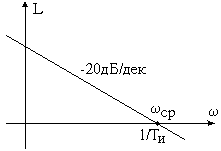
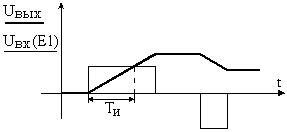
Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.59б, в, соответственно.
Физический смысл постоянной времени Тисостоит в том, что она численно равна времени, за которое выходной сигнал достигает уровня входного при нулевых начальных условиях.
И-регулятор и любой другой, имеющий интегрирующую часть, обладает свойством памяти (т.е. при нулевом входном сигнале выходной сохраняет накопленное к этому моменту значение).
а)
б)
в)
Рисунок 3.59
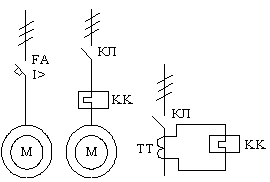
3. Тепловая защита
Осуществляет защиту двигателя от перегрева, вызванного перегрузкой по току:
а) при длительном режиме с помощью теплового реле и автоматов с тепловыми расцепителями;
б) в повторном кратковременном режиме с помощью реле максимального тока.
Общим недостатком рассмотренных узлов защиты от перегрузки является их низкая точность (двигатель и шкаф могут находиться в разных помещениях, при разных температурах и т.п.), поэтому более точная защита строится на теплосопротивлениях, которые закладываются в обмотки ЭД (см. рисунок 2.24).
Ч
Рисунок 2.24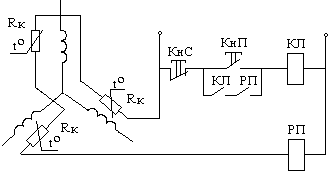
П
Рисунок 2.25
Рисунок 2.26