

1. Отрицательная обратная связь по напряжению
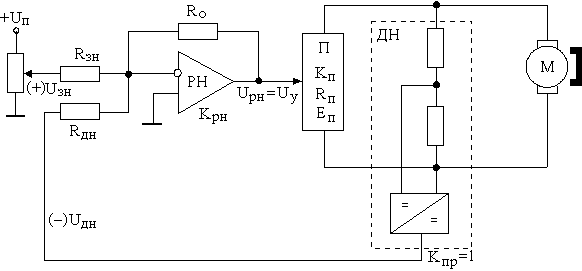
Система АЭП с отрицательной обратной связью по напряжению представлена на рисунке 4.1, где приняты обозначения: РН – регулятор напряжения; П – преобразователь; кпр =1 – коэффициент потенциального разделителя.
Рисунок
4.1
Проанализируем статический режим замкнутой системы и получим выражение для скоростной характеристики. Далее сравним жесткость этой системы с жесткостью естественной скоростной характеристики и характеристики разомкнутой системы.
а) Естественная характеристика (ЕХ)
Uн= Е + IRa= ceФн+ IRa;
E = ceФн;
![]() .
.
б) Разомкнутая система (РС)
U = E + I(Ra+ Rп),
где Rп– сопротивление преобразователя.
![]() .
.
Uзн1ЗС= 7,73В, Uзн1РС= 0,37В,ЕХЗСРС.
![]() ;
;
![]() .
.
в) Замкнутая система (ЗС) по напряжению
Uy= (Uзн– Uдн)крн (если Rзн= Rдн);
Еп= Uyкп = Е + I(Ra + Rп), Е = сеФн;
Uдн = Uдкдн, (Uд = Еп – IRп = Е + IRa).
Е = Uyкп – I(Ra + Rп) = (Uзн – Uдкдн)кпкрн – I(Ra + Rп);
Е(1+крнкпкдн) = Uзнкпкрн – I(Raкрнкпкдн + Ra + Rп).
![]() ;
;
![]() ;
;
= oi+ЗС.
Анализ ЗС:
пусть крнкпкдн
ЗС = IRa/сеФн = ЕХ;
2) при крнкпкдн= 0 (разорвали связь, т.е. РС)
![]() .
.
Физический смысл действия отрицательной обратной связи по напряжению состоит в том, что она компенсирует падение напряжения в преобразователе и в идеале (при к1к2к3) обеспечивает питание двигателя как бы от источника с нулевым внутренним сопротивлением.
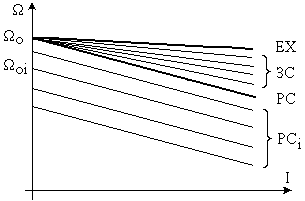
Статические характеристики системы АЭП с отрицательной обратной связью по напряжению представлены на рисунке 4.2.
Определим сигнал Uзн, который надо подать, чтобы получить сигнал на выходе.
![]() ;
;
![]() ;
;
![]() .
.
2. ПИ-регулятор
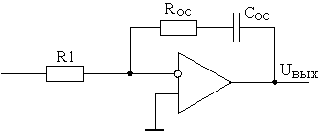
В соответствии с рисунком 3.60а, передаточная функция ПИ-регулятора
![]() ;
;
Zoc = Roc + 1/Coc p, Zвх = R1.
В зависимости от соединения ПИ-регулятор можно представить как параллельное (рисунок 3.60б), так и последовательное (рисунок 3.60в) соединение П- и И- звеньев.
Так, параллельное соединение удобно для временных зависимостей.
![]() .
.
Последовательное соединение удобно для анализа частотных свойств, т.к. lg xy = lg x + lg y.
![]() ,
,
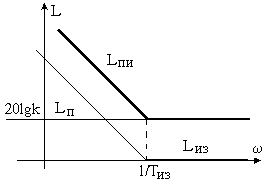
где Тиз= RocCoc– изодромная постоянная времени;
Частотная характеристика и временные зависимости входного и выходного напряжений представлены на рисунке 3.60г, д, соответственно.
НЧ: если Тиз<1, то< 1/Тиз;
ВЧ: если Тиз>1, то>1/Тиз.
а)
б)
в)
г)
д) Рисунок
3.60


Для организации этого способа необходимы электрические аппараты, контролирующие ток – реле тока, которые при определенных значениях тока вводят или выводят сопротивления из силовых цепей. Для повышения точности (уменьшения колебаний) тока используют реле с высоким коэффициентом возврата:
Кв= Iотп /Iср1.
Токовое реле в процессе регулирования тока вибрирует с частотой 10 – 20 Гц. Способ применяется редко, наиболее распространен в приводах постоянного тока с двухзонным регулированием скорости (регулирование скорости во второй зоне за счет ослабления поля двигателя).
Схема пуска ДПТ НВ
Т
Рисунок 2.11
Реально Iотпруп= Iсрруп,Тв= LB/RB.
Твпри уменьшении потока – Тв= LB/(RB+Rвд). Твпри увеличении потока – Тв= LB/(RB), то есть ослабление потока идет с большей интенсивностью, чем увеличение (см. рисунок 2.12).
П
Рисунок 2.12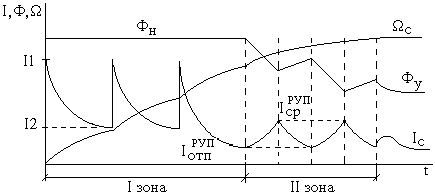
П
Рисунок 2.13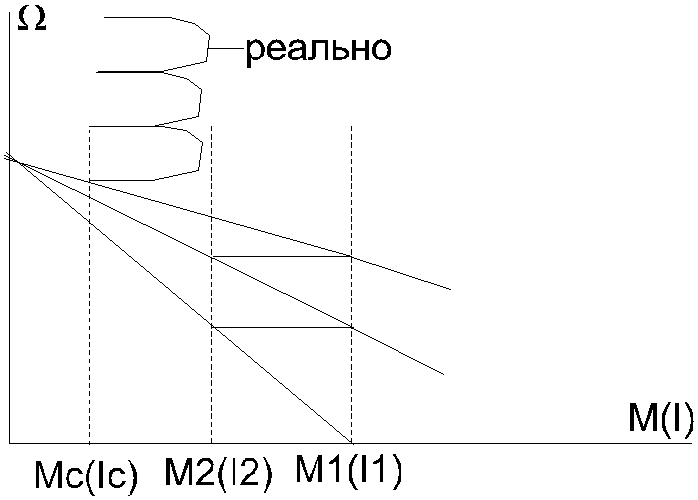

При уменьшении поля поток ослабляется в большей степени, чем увеличивается , поэтому ток якоря растет. При увеличении поля ток якоря растет.
Работа схемы: данный узел начинает работать после включения контактора КУ2, т.е. при выходе двигателя на ЕХ. От броска тока срабатывает РУП и вновь шунтирует Rвд(до этого оно шунтировалось контактором КУ2). Разгон продолжается на ЕХ до момента времени, когда ток якоря станет равным току отпускания РУП. Реле РУП выключается, в цепь обмотки возбуждения вводится Rвд, происходит ослабление поля, ток якоря увеличивается. При токе якоря равным току срабатывания РУП оно (РУП) зашунтирует Rвд, поле электродвигателя начнет увеличиваться, но значительно медленнее, ток якоря начнет уменьшаться.
Процесс повторится несколько десятков раз, пока поле выйдет на Фу, которое соответствует определенному положению движка Rвд.
В мощных системах АЭП РУП включает свой контактор управления полем (КУП), который вызывает включение и отключение добавочного сопротивления. При резком изменении положения движка Rвдтакже будет идти вибрационное управление, т.е. управление функцией тока.
Достоинства: простота реализации метода.
Недостатки:
- для каждого электродвигателя нужен свой электрический аппарат (РУП);
- время пуска является функцией Мси момента инерции.