

Курсовой проект по дисциплине «Теория механизмов и машин»
.pdfБалтийский Государственный Технический Университет «ВОЕНМЕХ» имени Д. Ф. Устинова
Кафедра К4 «Прикладная механика, автоматика и управление»
Курсовой проект
по дисциплине «Теория механизмов и машин»
Пресс механический
Вариант №19
Выполнил:
Студент группы К-491
Фоминых П.Ю.
Санкт-Петербург
2013
2
Техническое задание
Пресс механический. Номер задания курсового проекта: КП 1___. 5__0 . 000
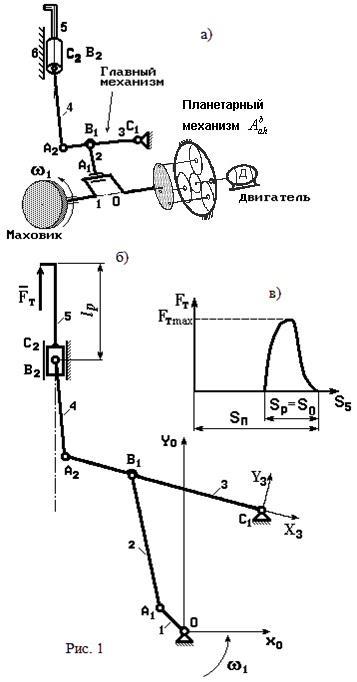
В состав машины входят (рис. 1):
1.Главный шестизвенный рычажный механизм ОА1В1C1C2, производящий технологическую операцию вытяжки. FТ – технологическая сила, действующая на пуансон 5 в процессе операции. В таблице даны максимальные значения силы FТ max.
2.Асинхронный электродвигатель переменного тока.
3.Зубчатый механизм, передающий движение с вала двигателя на вал кривошипа 1. Тип зубчатого механизма указан в таблице, на рис. 1 изображен планетарный механизм.
Размеры звеньев главного механизма для различных вариантов задания представлены в таблице. Центр масс кривошипа находится в точке O, центры масс остальных звеньев – в их геометрическом центре. Координаты точки A2 в системе X3Y3:
|
|
|
|
|
|
|
|
|
|
XA2(3) –1,4 B1C1; |
|
YA2(3) |
= 0. |
|
|
||||
|
|
|
|
|
|
|
Положение оси ползуна C2 выбирается так, чтобы |
||||||||||||
|
|
|
|
|
|
|
точка A2 при проворачивании оставалась левее оси |
||||||||||||
|
|
|
|
|
|
|
ползуна, а угол между осью ползуна и шатуном 4 не |
||||||||||||
|
|
|
|
|
|
|
превышал 20O … 25O. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Цикл работы главного механизма начинается от |
||||||||||||
|
|
|
|
|
|
|
крайнего верхнего положения ползуна 5. Его полный |
||||||||||||
|
|
|
|
|
|
|
ход SП определяется при кинематическом анализе. |
||||||||||||
|
|
|
|
|
|
|
Длина пуансона принимается: lP = (1,5 … 2) S5max. |
||||||||||||
|
|
|
|
|
|
|
Величину рабочего хода приближенно можно |
||||||||||||
|
|
|
|
|
|
|
принять: SP = 0,25 SП. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Угловая скорость кривошипа: 1 = n1 / 30. |
|
|
||||||||||
|
|
|
|
|
|
|
где n1 – частота вращения кривошипа по таблице |
||||||||||||
|
|
|
|
|
|
|
Моменты инерции звеньев: |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
кривошип: |
|
|
J1 2,5 m1 l12 /30; |
|
|
|
||||||
|
|
|
|
|
|
|
остальные звенья: Jj |
mj lj2 /30, j = 2,3,4, |
|
|
|||||||||
|
|
|
|
|
|
|
где lj – длина звена. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Допускаемый |
коэффициент |
неравномерности хода |
||||||||||
|
|
|
|
|
|
|
при исследовании динамики машины: [ ] = 0,1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
ОA1 |
A1В1 |
B1C1 |
A2В2 |
XC1 |
YC1 |
n1 |
m1 |
|
m2 |
|
m3 |
|
m4 |
|
m5 |
FТ max |
Тип |
|
а |
м |
м |
м |
м |
в |
в |
|
|
|
|
зубчат. |
|
|||||||
р |
( l1 ) |
( l2 ) |
( l3 ) |
( l4 ) |
OX0Y0 |
OX0Y0 |
об/мин |
кг |
|
кг |
|
кг |
|
кг |
|
кг |
кH |
механ. |
|
2 |
0,080 |
0,25 |
0,24 |
0,25 |
0,07 |
0,27 |
90 |
65 |
|
16 |
|
42 |
|
52 |
|
120 |
18 |
Пл. А |
|
3
Содержание
Введение....................................................................................................................................................... |
4 |
1.Структурный анализ главного механизма ............................................................................................. |
4 |
2.Кинематический анализ главного механизма........................................................................................ |
5 |
2.1.Постановка задачи............................................................................................................................. |
5 |
2.2.Кинематический анализ в одном положении механизма .............................................................. |
6 |
2.2.1.Метод векторных контуров ....................................................................................................... |
6 |
2.2.2.Метод преобразования координат .......................................................................................... |
12 |
2.3.Кинематические диаграммы .......................................................................................................... |
14 |
3.Инерционные параметры главного механизма ................................................................................... |
21 |
3.1.Массы и моменты инерции звеньев .............................................................................................. |
21 |
3.2.Приведение масс и моментов инерции ......................................................................................... |
21 |
4.Внешняя нагрузка .................................................................................................................................. |
22 |
5.Проектирование привода....................................................................................................................... |
24 |
5.1.Выбор двигателя.............................................................................................................................. |
25 |
5.2.Проектирование зубчатого механизма.......................................................................................... |
26 |
6.Силовой расчет главного рычажного механизма................................................................................ |
27 |
6.1.Постановка задачи........................................................................................................................... |
27 |
6.2.Силовой расчет в одном положении механизма .......................................................................... |
28 |
6.2.1.Внешние силы........................................................................................................................... |
28 |
6.2.2.Реакции в кинематических парах ........................................................................................... |
29 |
7.Исследование динамических свойств машины и обеспечение требуемой плавности хода ........... |
32 |
7.1.Постановка задачи, уравнение движения ..................................................................................... |
32 |
7.2.Результаты математического моделирования и их анализ.......................................................... |
35 |
Заключение ................................................................................................................................................ |
36 |
Литература ................................................................................................................................................. |
36 |

4
Введение
Вданном курсовом проекте решается ряд взаимосвязанных задач по исследованию и проектированию механического пресса. Целью выполнения проекта является получение зависимостей движения интересующих нас звеньев и точек механизма, а также, на основе полученных расчетов и данных, произвести выбор подходящего привода.
Впроекте будут произведены:
-структурный анализ главного механизма
-кинематический анализ главного механизма
-определение инерционных параметров
-определение внешней нагрузки
-проектирование привода
-силовой расчет главного механизма
-исследование динамических свойств машины и обеспечение требуемой плавности хода
Расчеты, таблицы, графики и рисунки, приведенные в проекте, выполняются при помощи программы Mechanic, реализующей решение всех рассматриваемых задач.
1.Структурный анализ главного механизма
Структурная схема главного механизма представлена на Рис.1:
Рисунок 1
5
Главный рычажный механизм состоит из 5 подвижных звеньев и неподвижной стойки.
Звено 1 – входной кривошип; звено 2 – шатун; звено 3 – коромысло; звено 4 – шатун; звено 5 – ползун.
Звенья образуют 7 кинематических пар 5-го класса. Число степеней свободы по формуле Чебышева: W= 3n – 2р5 – р4 = 3.5-2.7-0 = 1
Пассивных связей в механизме нет.
Структурное деление механизма: входное звено – кривошип, структурная группа 1 – трехшарнирная, структурная группа 2 – шатун-ползун. По классификации АсураАртоболевского обе структурные группы имеют 2-й класс, 2-й порядок, следовательно весь механизм имеет 2-й класс, 2-й порядок.
2.Кинематический анализ главного механизма 2.1.Постановка задачи
Если число степеней свободы механизма W = 1, то при фиксированных размерах звеньев значения их кинематических параметров движения однозначно определяются значениями кинематических параметров движения одного звена, называемого входным, которым и считается то звено, характер движения которого при кинематическом анализе полагается известным. Тогда задача кинематического анализа формулируется следующим образом: при известных мгновенных значениях кинематических параметров движения входного звена определить мгновенные значения кинематических параметров движения остальных звеньев. Таким образом, задача кинематического анализа решается автономно в каждом положении механизма, а для полного кинематического исследования ее надо решить многократно для ряда последовательных положений механизма за весь цикл его работы.
При кинематическом анализе будем полагать, что кривошип вращается с постоянной угловой скоростью: ω1 = πn1/30 = 90π/30 = 9,42 (1/с). Решение описанной задачи опирается на структурный анализ механизма. Общую последовательность кинематического расчета можно представить следующим образом.
1.По исходно заданным кинематическим параметрам движения входного звена определяются параметры движения той его точки, в которой присоединяется первая структурная группа.
2.Производятся расчеты для нее и вычисляются параметры движения той точки звена структурной группы, в которой присоединяется следующая.
3.Эти значения преобразуются в систему координат следующей структурной группы, производится ее расчет и т.д.
Основные расчетные зависимости для структурных групп получим методом векторных контуров, параметры движения характерных точек на звеньях, таких как центры масс, рабочие органы, точки присоединения и т.п. – методом преобразования координат.
В ходе кинематического исследования механизма в данном курсовом проекте описанная задача решается для заданного начальными условиями положения механизма.
6
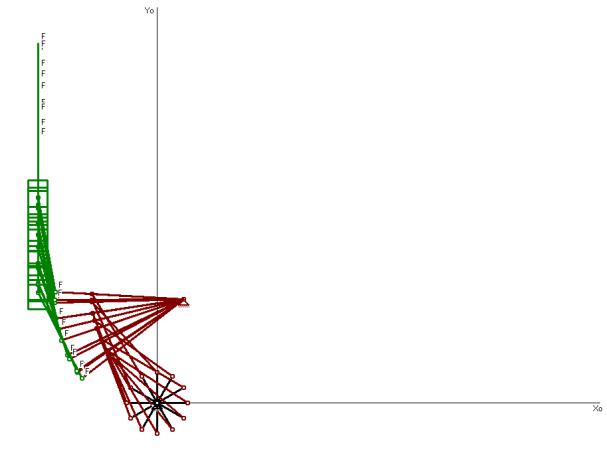
На рис.2 представлены планы механизма за цикл его работы. Началом цикла считается то положение, в котором ползун находится в крайнем верхнем положении.
Рисунок 2
2.2.Кинематический анализ в одном положении механизма 2.2.1.Метод векторных контуров
При решении задачи кинематического анализа механизма методом векторных контуров:
1.Звенья механизма представляют в виде векторов. Поскольку в данном случае механизм замкнут через стойку, то они образуют замкнутые контуры.
2.Составляют векторные уравнения замкнутости контуров
3.Выбирают удобную систему координат, и уравнения замкнутости проецируют на её оси, получая системы алгебраических уравнений для определения кинематических параметров, характеризующих положение звеньев
4.Последовательно дважды дифференцируют эти уравнения по времени, получая системы уравнений для определения скоростей и ускорений.
5.Особое внимание обращается на отсчет углов. Угол поворота вектора отсчитывается от положительного направления оси Х системы координат, в которой производится расчет до положительного направления вектора против часовой стрелки. Несоблюдение этого правила может привести к получению неправильных результатов по правильным формулам.
7
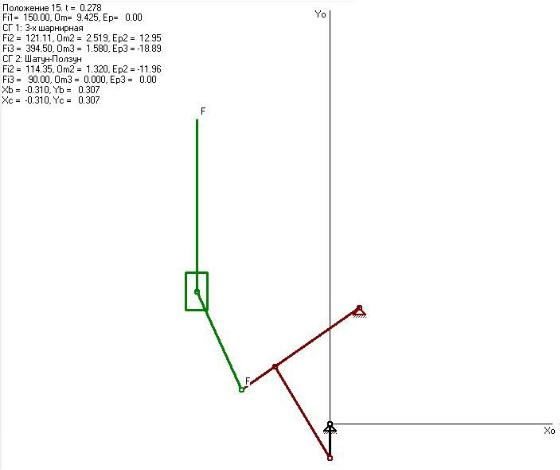
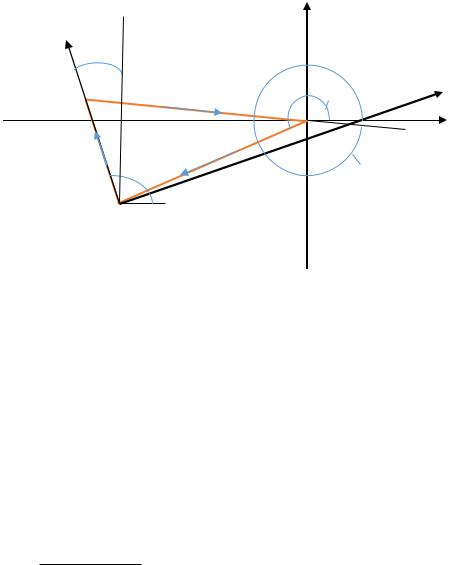
Расчетное положение механизма задаем углом поворота кривошипа 150о от начала цикла. Началом цикла считается то положение кривошипа, при котором ползун занимает крайнее верхнее положение. Угол поворота кривошипа в отсчёте от оси X0 при этом составляет 270°.
Расчетное положение механизма представлено на рис.3:
Рисунок 3
Рассматриваем первый контур OA1B1C1, он представляет собой соединение входного звена и трехшарнирной структурной группы 1, сборка прямая.
Уравнение замкнутого векторного контура:
1 + 2 + 3 + 4 = 0
Проецируем его на оси неподвижной системы координат OXY:
1l cos 1 + 12 |
cos 2 |
+ 13 |
cos 3 + 14 |
cos 4 |
= 0, |
( 1 ) |
|
|
|
|
|
|
1l sin 1 + 12 sin 2 + 13 sin 3 + 14 sin 4 = 0.
Для начала найдем координаты шарнира B1, для этого в системе координат A1X1Y1 запишем уравнения окружностей: первая радиусом А1В1 с центром в шарнире А1, вторая радиусом С1В1, с центром в шарнире С1:
X2 + Y2 = (А1В1)2, |
( 2 ) |
|
|
(А1C1 – X)2 +Y2 = (С1В1)2. |
|
|
|
|
|
8 |
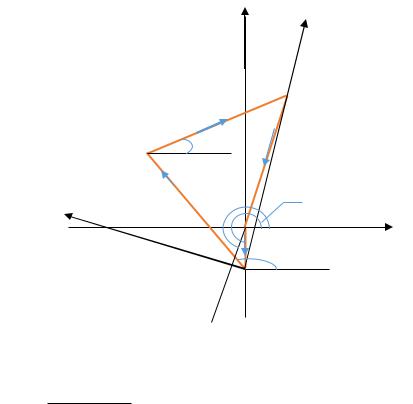
Расчетная схема первого контура представлена на рис.4: |
||||
|
|
Y |
|
|
|
|
|
|
X1 |
|
|
|
|
C1 |
|
|
|
|
|
|
|
3 |
|
|
B1 |
|
|
|
|
|
4 |
|
||
|
|
3 |
|
|
|
|
4 |
|
1 |
Y1 |
2 |
|
|
|
|
|
O |
|
X |
|
|
|
1 |
2 |
|
|
|
A1 |
|
Рисунок 4 |
|
|
|
|
Из системы уравнений (2) получаем координаты шарнира B1 в системе координат A1X1Y1:
XB11 = ((А1C1)2 + (А1В1)2 – (С1В1)2) / 2 А1C1 = 0,18533
YB11 = 
 ( A1B1 )2 X 2 = 0,16779
( A1B1 )2 X 2 = 0,16779
Найденные координаты преобразуем в систему OXY с помощью метода преобразования координат:
X
Y B1B1
X A1 |
|
cos k |
|
|
|
|
|
YA1 |
|
|
sin k |
sin k |
X B11 |
|
, здесь φk – относительный угол преобразования |
|
|
|
|
cos k |
YB11 |
|
|
Координаты шарнира B1 в неподвижной системе координат OXY:
XB1 = -0,128; YB1 = 0,135
Координаты шарнира A1 в неподвижной системе координат OXY, учитывая, что 1 = 270o, XA1 = 1l cos 1, YA1 = 1l sin 1:
XA1 = 0; YA1 = -0,08.
Тогда можно найти угол поворота шатуна А1В1:
sin 2 = cos ( 2 - 90o) = (YB1 – YA1) / А1В1
2 = π – arcsin 2 = 120,7o
Т.к. по условию координаты шарнира С1 в неподвижной системе координат OXY заданы, то можно найти угол поворота коромысла С1В1:
sin 3 = (YС1 – YB1) / С1В1
3 = arcsin 3 = 34,2o
9
Для определения угловых скоростей шатуна А1В1 и коромысла С1В1 продифференцируем систему уравнений (1) по времени:
-1l ω1 sin 1 - 12 |
ω2 sin 2 - 13 |
ω3 sin 3 - 14 |
ω4 sin 4 |
= 0, |
( 3 ) |
|
|
|
|
|
1l ω1 cos 1 + 12 ω2 cos 2 + 13 ω3 cos 3 + 14 ω4 cos 4 = 0.
Т.к. вектор 4 не совершает движения, угловая скорость ω4 = 0. Также cos 1 = 0.
C учетом этого система преобразуется:
-12 |
ω2 sin 2 - 13 |
ω3 sin 3 |
= 1l ω1 sin 1, |
( 4 ) |
|
|
|
|
12 ω2 cos 2 + 13 ω3 cos 3 = 0.
Система уравнений (4) линейна относительно ω2 и ω3 и легко разрешима.
С помощью матричного метода решения системы линейных алгебраических уравнений получаем искомые угловые скорости:
ω2 = 2,499 рад/с; ω3 = 1,606 рад/с.
Для определения угловых ускорений шатуна А1В1 и коромысла С1В1 продифференцируем систему уравнений (3) по времени:
–l1 (ε1 sin 1 + ω12 cos 1) – l2 (ε2 sin 2 + ω22 cos 2) – l3 (ε3 sin 3 + ω32 cos 3) – l4 (ε4 sin 4 + ω42 cos 4) = 0,
l1 (ε1 cos 1 – ω12 sin 1) + l2 (ε2 cos 2 – ω22 sin 2) + l3 (ε3 cos 3 – ω32 sin 3) + l4 (ε4 cos 4 –
ω42 sin 4) = 0. |
|
( 5 ) |
|
|
|
C учетом того, что угловые скорость и ускорение: ω4 = 0 и ε4 = 0; а также, что ε1 = 0 и |
|
|
cos 1 = 0, можно преобразовать систему уравнений (5): |
|
|
–l2 ε2 sin 2 – l3 ε3 sin 3 = l2 |
ω22 cos 2 + l3 ω32 cos 3, |
( 6 ) |
|
|
|
l2 ε2 cos 2 + l3 ε3 cos 3 = l1 |
ω12 sin 1 + l2 ω22 sin 2 + l3 ω32 sin 3. |
|
Система уравнений (6) линейна относительно ε2 и ε3 и легко разрешима.
С помощью матричного метода решения системы линейных алгебраических уравнений получаем искомые угловые ускорения:
ε2 = 13,152 рад/с2; ε3 = -18,839 рад/с2.
Рассмотрим второй контур C1A2B2, он представляет собой соединение коромысла и структурной группы 2 шатун-ползун.
Уравнение замкнутого векторного контура:
1 + 2 + 3 = 0
Проецируем его на оси неподвижной системы координат С1XY: |
|
||||
1l cos 1 + 12 |
cos 2 |
+ 13 |
cos 3 |
= 0, |
( 7 ) |
|
|
|
|
|
|
1l sin 1 + 12 sin 2 + 13 sin 3 = 0.
10
Расчетная схема второго контура представлена на рис.5:
|
|
Y |
||||
Y1 φ |
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
B |
|
|
φ1 |
|
||
2 |
3 |
С1 |
||||
|
|
|||||
|
|
|
|
|
|
X |
|
|
|
|
φ3 |
|
|
|
1 |
|
|
|
|
|
2 |
φ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
Рисунок 5
Для начала определим положение шарнира B2 в системе координат С1XY:
По оси X координата шарнира B2 определяется двумя составляющими – расстоянием между осью ползуна 5 и вертикальной осью шарнира O (оно задается самостоятельно в программе Mechanic с учетом ограничений из ТЗ ) и расстоянием между осями шарниров O и С1. В данном случае координата шарнира B2 по оси X в системе координат С1XY XB2 = -0,38
Определяем координату шарнира B2 по оси Y:
sin φ = (XB2 – l1 cos (φ1 – 180o)) / l2 => φ = 24,13o
cos φ = (YB2 - YA2) / l2 , где YA2 = - l1 sin (φ1 – 180o) = -0,19
YB2 = l2 cos φ + YA2 = 0,04
Теперь можем найти длину вектора l3 и угол φ3:
l3 = 
 (XB2 )2 (YB2 )2 = 0,382
(XB2 )2 (YB2 )2 = 0,382
φ3 = 360o – arcsin (YB2/ l3) = 354,13o
Находим углы φ1 и φ2:
φ1 = 180o + φ3* (угол φ3 из первого контура) = 214,23o
φ2 = 90o + φ = 114,13o – угол поворота шатуна A2B2
Теперь все параметры системы уравнений (7) известны.
Для определения угловых скоростей шатуна А2В2 и вектора С1В2 продифференцируем систему уравнений (7) по времени:
-l1 ω1 sin 1 –l2 ω2 sin 2 –l3 |
ω3 sin 3 |
= 0, |
( 8 ) |
|
|
|
l1 ω1 cos 1 + l2 ω2 cos 2 + l3 ω3 cos 3 = 0.