

Курсовой проект по дисциплине «Теория механизмов и машин»
.pdf21
3.Инерционные параметры главного механизма 3.1.Массы и моменты инерции звеньев
Моменты инерции звеньев:
кривошип: J1 2,5 m1 l12 /30;
остальные звенья: Jj mj lj2 /30, j = 2,3,4, где lj – длина звена Рассчитаем моменты инерции:
J1 2,5*65 *0,082 /30 = 0,109 кг*м2
J2 16*0,252 /30 = 0,104 кг*м2
J3 42 (1,4*0,24)2 /30 = 0,496 кг*м2
J4 52*0,252 /30 = 0,340 кг*м2
Таблица инерционных параметров звеньев представлена таблицей 8:
Номер звена |
Масса, кг |
Момент инерции, кг*м2 |
1 |
65 |
0,109 |
2 |
16 |
0,104 |
3 |
42 |
0,496 |
4 |
52 |
0,340 |
5 |
120 |
0 |
Таблица 8
3.2.Приведение масс и моментов инерции
Условием приведения масс и моментов инерции к звену приведения является равенство кинетических энергий, которой суммарно обладают все звенья, входящие в механизм и кинетической энергии звена приведения, т.е.
ПР |
( 18 ) |
E = E∑ |
Раскрывая выражения для кинетических энергий из равенства (18), для вращающегося звена приведения имеем:
J ПР 2 |
n m jVSj2 |
|
J j 2j |
|
|
1 |
|
|
|
|
|
|
|
|
|||
2 |
|
2 |
|
2 |
|
|
j 1 |
|
|
|
|
где mj, Jj – массы и моменты инерции звеньев, VSj – скорости центров масс звеньев, ωj – угловые скорости звеньев, n – количество подвижных звеньев.
Из условия (19) получаем формулу для вычисления приведенного момента инерции:
|
n |
|
V |
2 |
|
|
j |
2 |
|
n |
m |
|
|
|
|
J ПР |
|
m |
Sj |
|
J |
|
|
|
|
S '2 |
J i2 |
||||
|
|
|
|||||||||||||
|
|
j |
1 |
|
j |
1 |
|
|
j |
j1 |
j j1 |
|
|||
|
j 1 |
|
|
|
|
j 1 |
|
|
|
( 20 ) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
где S’j1, ij1 – передаточные функции и передаточные отношения.

22
Преобразуем формулу (20), учитывая особенности заданного главного механизма:
JПР = |
J1 J2 2 |
|
2 |
J3 3 |
|
2 |
J4 4 |
|
2 |
m2 |
Vs2 |
|
2 |
m4 |
Vs4 |
|
2 |
m5 |
Vs5 |
|
2 |
( 21 ) |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 |
|
1 |
|
1 |
|
1 |
|
1 |
|
1 |
|
|
|||||||||
Подставив значения соответствующих параметров в формулу (21), полученные ранее для расчетного положения механизма, узнаем приведенный момент инерции в этом положении:
JПР = 0,887 кг*м2
Ниже представлен график приведенного момента инерции за цикл (из Mechanic)
Рисунок 11
4.Внешняя нагрузка
Внешняя нагрузка, действующая на пуансон, описана в Техническом задании. В нем приведен график, показывающий примерное изменение технологической силы с ходом рабочего органа (пуансона) и задано максимальное значение приложенной силы (FТ max = 18кН).
Полный ход (SП) рабочего органа определяется при кинематическом анализе механизма, в нашем случае SП = 0,2504 м.
Рабочий ход (SР) и зона обработки (SО) рабочего органа, следуя указанию ТЗ, равны:
SО = SР = 0,25 SП = 0,0626 м

23
График технологической силы получаем с помощью программы Mechanic:
Рисунок 12
В результате действия технологической силы на пуансон, на входном кривошипе 1 возникает момент MПР, называемый приведенным моментом. Этот момент эквивалентным образом заменяет собой воздействие всех внешних сил и моментов, действующих на все звенья главного механизма. Кривошип 1 в таком случае называют звеном приведения.
Условием приведения внешних сил к звену приведения является равенство мощностей, развиваемых реальными силами и моментами, приложенными к звеньям и мощности, развиваемой приведенным моментом на звене приведения, т.е.:
ПР |
|
( 22 ) |
N = NΣ |
|
|
Раскрывая выражения для мощностей (22), имеем: |
|
|
n |
|
|
M ПР 1 FjVSj cos j M j j |
|
( 23 ) |
j 1 |
|
|
где Fj, Mj – главные векторы и главные моменты сил, приложенных к звеньям, VSj – скорости центров масс звеньев, j – углы между векторами Fj и VSj, j – угловые скорости звеньев, n – количество подвижных звеньев в машине.
Из условия (23) получаем формулу для вычисления приведенного момента:
|
n |
|
|
|
|
V |
|
|
|
|
|
n |
F |
|
|
|
|
|
|
|
|
M ПР |
|
F |
cos |
|
Sj |
M |
|
|
j |
|
|
|
cos |
|
S ' |
M i |
|
|
|||
|
j |
|
j |
|
|
j |
j1 |
( 24 ) |
|||||||||||||
|
|
j |
|
1 |
|
|
|
|
j |
|
j1 |
j |
|
||||||||
|
j 1 |
|
|
|
|
|
1 |
|
j 1 |
|
|
|
|
|
|
|
|
||||
где S’j1, ij1 – передаточные функции и передаточные отношения.
24
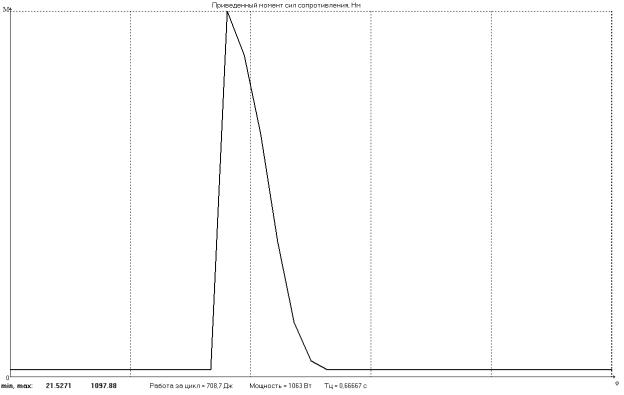
Приведенный момент сил сопротивления рассчитан программой Mechanic. Ниже показан график приведенного момента сил сопротивления:
Рисунок 13
Минимальная требуемая мощность двигателя равна мощности, развиваемой приведенным моментом на звене приведения:
Nmin = 1063 Вт
5.Проектирование привода
Механический пресс представляет собой машинный агрегат, состоящий из исполнительного (главного) механизма, электродвигателя и расположенного между ними передаточного механизма. Совокупность двигателя и передаточного механизма вместе с относящейся к нему аппаратурой называется приводом машины.
Для согласования скоростей вала двигателя и вала кривошипа служит планетарный зубчатый редуктор, понижающий в требуемое количество раз угловую скорость и соответственно повышающий движущий момент при передаче энергии от двигателя к исполнительному механизму.
По Техническому заданию машина приводится в движение асинхронным электродвигателем переменного тока. Тип зубчатого механизма также регламентируется Техническим заданием: планетарный типа A.
В данном разделе рассматривается выбор двигателя и проектирование передаточного механизма.

25
5.1.Выбор двигателя
Выбор двигателя осуществляется по двум критериям:
1)Требуемая мощность.
2)Номинальная частота вращения ротора nн.
Минимальная требуемая мощность определена ранее и составляет Nmin = 1063 Вт. Выбираемый двигатель должен иметь несколько большую мощность.
Диапазон передаточного отношения планетарного механизма типа А: iтр = 3…9, при этом iтр = nн / n1 => nн должен находиться в пределах nн = iтр * n1 = 270…810 об/мин.
В соответствии с принятыми критериями, по каталогу программы Mechanic выбираем двигатель 4A90LB8Y3. Его механическая характеристика показана на рисунке 14:
Рисунок 14

26
5.2.Проектирование зубчатого механизма
Требуемое передаточное отношение зубчатого механизма: iтр = nн / n1 = 7,78
Максимальная расчетная нагрузка:
- из раздела внешней нагрузки: Mmax1 = 1098 Нм
Исходные данные для проектирования зубчатого механизма сведем в таблицу:
Параметр |
Значение |
Тип механизма |
Планетарный 2k-h, Схема «А» |
Количество ступеней |
1 |
Требуемое передаточное отношение |
7,78 |
Максимальный момент на выходном валу |
1098 Нм |
Частота вращения выходного вала |
90 об/мин |
Таблица 9 |
|
Проектировочный расчет зубчатого механизма производится автоматизированно в программе Mechanic, его результаты приведены на рис.15. На рис.16 показан вид в плане.
Рисунок 15
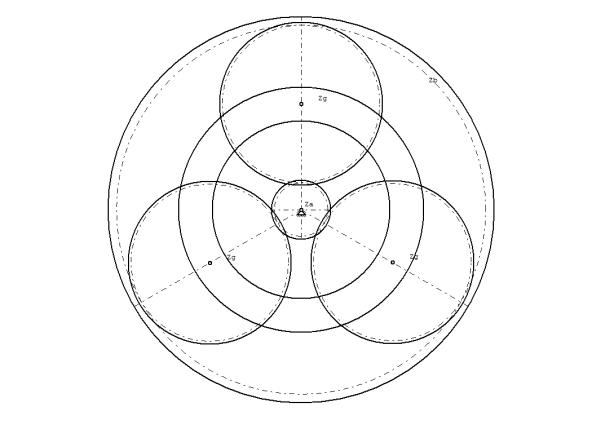
27
Рисунок 16
6.Силовой расчет главного рычажного механизма 6.1.Постановка задачи
Целью силового расчета механизма является определение всех сил, действующих на его звенья. При этом силы, которые предстоит определить, можно разделить на две категории:
1.Внешние силы. Это, например, технологические силы, силы тяжести, трения и инерции.
2.Внутренние силы. Это реакции в кинематических парах. Определение именно этих сил составляет главную цель силового расчета.
Силовой расчет базируется на следующих принципах:
1.Принцип д’Аламбера. Его можно сформулировать так: если к системе сил,
действующих на систему тел добавить в качестве внешней инерционную нагрузку, то получившуюся систему можно рассматривать находящейся в состоянии квазиравновесия.
Именно в соответствии с этим Принципом механики инерционные силы попадают в разряд внешних.
2.Принцип освобождения от связей. Применительно к механизмам его можно сформулировать следующим образом: если мы рассматриваем отдельно какую-то часть механизма (например, структурную группу), т.е. отделяем ее от остального механизма фактически рассоединяя некоторые кинематические пары, то в местах отсоединений мы должны приложить реакции отброшенных частей.

28
3. Принцип взаимности. Если звено j действует на звено k с силой Rjk , то звено k
действует на звено j с силой Rkj Rjk .
Силовой анализ производится методом кинетостатики. Его суть сводится к следующему. Полагают, что механизм совершает кинематически определенное движение. Расчеты, как и в кинематике, производятся автономно для каждого положения механизма. Ускорения звеньев, необходимые для вычисления инерционных нагрузок определяют методами кинематического анализа, а реакции в кинематических парах получают путем решения уравнений квазистатического равновесия структурных частей механизма.
6.2.Силовой расчет в одном положении механизма
Общий порядок силового расчета следующий. Начинается он с последней структурной группы, для нее:
1.Вычисляются все внешние силы, приложенные к ее звеньям.
2.Для каждого звена внешние силы приводятся к главному вектору и главному моменту.
3. Составляются и решаются уравнения равновесия, в результате чего получают искомые реакции в кинематических парах данной группы.
4. Реакция в той кинематической паре, которой данная группа присоединяется к предыдущей, взятая с обратным знаком будет внешней силой для предыдущей структурной группы.
Эти четыре пункта последовательно повторяются для каждой структурной группы и в результате получают силу, действующую на входное звено механизма, после чего производят его силовой расчет.
6.2.1.Внешние силы
В расчетном положении механизма, характеризующимся углом поворота кривошипа 150o, положение ползуна составляет 0,2268 м от начала цикла его полного хода. На графике технологической силы это соответствует 16,5 кН.
Силы тяжести вычисляются по формуле
Gi = mi g,
где: mi – масса i-го звена, g – ускорение свободного падения.
Инерционная нагрузка для звеньев механизмов в общем случае состоит из двух компонент. Сил инерции:
̅̅̅̅ |
= − ̅̅̅̅ |
, |
|
||
и |
|
|
где: aSi – ускорение центра масс i-го звена,

29
и инерционных моментов; для плоских механизмов:
M Иi JSi Si
где: JSi – момент инерции i-го звена, i – его угловое ускорение.
Силами трения можно пренебречь.
В курсовом проекте примем следующий критерий: те силы, которые более чем в 30 раз меньше технологической силы будем считать пренебрежимо малыми.
При составлении уравнений равновесия будем предполагать, что все внешние силы, действующие на каждое i-е звено приведены к главному вектору Fi, приложенному в центре масс Si и главному моменту Mi .
Значениями сил, меньшими чем 16500Н/30=550Н будем пренебрегать.
Силы тяжести: |
|
Силы инерции: |
|||
G1 = m1 g = 637,65 |
Н |
Fи1 = -m1 as1 |
= -24,505 Н – можно пренебречь, |
||
G2 |
= m2 g = 156,96 |
Н - можно пренебречь, |
Fи2 = -m2 |
as2 |
= -91,2 Н – можно пренебречь, |
G3 |
= m3 g = 412,02 |
Н - можно пренебречь, |
Fи3 = -m3 |
as3 |
= -134,4 Н – можно пренебречь, |
G4 |
= m4 g = 510,12 |
Н - можно пренебречь, |
Fи4 = -m4 |
as4 |
= -327,08 Н – можно пренебречь, |
G5 |
= m5 g = 1177,2 |
Н |
Fи5 = -m5 |
as5 |
= 847,8 Н |
Инерционные моменты:
Mи1 = -Js1 εs1 = 0 Н.м
Mи2 = -Js2 εs2 = -1,3678 Н.м
Mи3 = -Js3 εs3 = 9,3441 Н.м
Mи4 = -Js4 εs4 = 6,4117 Н.м
6.2.2.Реакции в кинематических парах
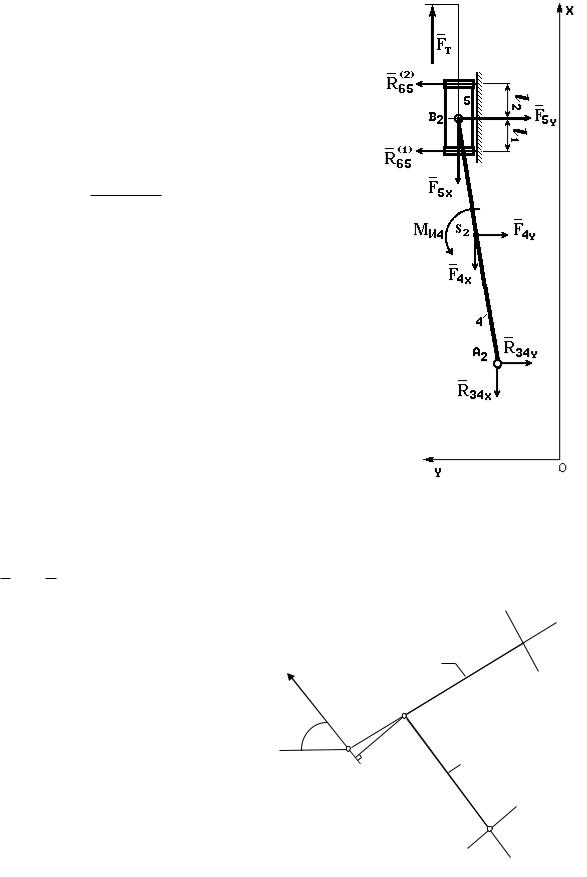
Силовой расчет структурной группы A2B2C2 "шатун – ползун"
Расчет этой группы произведем аналитическим методом. Решение будем искать в НСК OXY, ось X которой параллельна оси ползуна, а начало координат поместим в центр опоры O (см. рис.17). Уравнение равновесия структурной группы в целом в виде равенства нулю суммы всех сил, на нее действующих:
R34 F5 FT R65(1) R65(2) 0,
или в проекциях на оси OXY:
-R34x – F5x + FT = 0,
-R34y – F5y + R65(1) + R65(2) = 0.
30
Из первого уравнения сразу определяется составляющая R34x = – F5x + FT = – (G5 – Fи5) + FT = 16170 Н. Равновесие шатуна 4 в виде равенства нулю суммы моментов всех сил относительно точки В2:
R34y l4 cos φ – R34x l4 sin φ + Mи4 = 0.
Отсюда находим R34y = (–Mи4 + R34x l4 sin φ) / l4 cos φ = 7213 Н, здесь угол φ=24,13o взят из расчетной схемы второго векторного контура. Тогда полная реакция в шарнире A2:
R34 
 R342 x R342 y 17710Н
R342 x R342 y 17710Н
Для определения реакций R65(1), R65(2) составим систему уравнений, первое из которых отражает равновесие ползуна 5 в виде равенства нулю суммы проекций всех сил на ось Y, а второе – равенство нулю суммы моментов всех сил относительно точки В2:
-R34y + R65(1) + R65(2) = 0,
–R65(1) l1 + R65(2) l2 = 0.
Решая систему (25) найдем реакции R65(1), R65(2):
т.к. l1 = l2, R65(1) = R65(2) = R65 и 2R65 = R34y, то R65(1) = R65(2)
= R34y / 2 = 3606 Н
Силовой расчет структурной группы A1B1C1
Расчет этой группы произведем графоаналитическим методом планов сил. Рисунок 17
Силы тяжести и инерции пренебрежимо малы по сравнению с усилием R43. Расчетная схема представлена на рис.18. Реакция R34 была найдена при расчете предыдущей структурной
группы и R43 R34 .
Назовем нормальным – направление вдоль оси звена, касательным – перпендикулярно оси. На рис.18 показаны
нормальные n2, n3 и касательные 2, 3 |
|
||||
43 |
|||||
направления для звеньев 2 и 3. Реакции в |
B1 |
||||
|
|||||
шарнире A1 – R12 и в шарнире C1 – R63, |
1 |
||||
неизвестные как по величине, так и по |
h43 |
||||
направлению, будем искать в проекциях на |
A2 |
||||
эти направления. |
|
|
|
||
Уравнение равновесия всей |
|
||||
структурной группы в целом: |
|
||||
|
|
|
|
|
|
Rn |
R |
R |
Rn |
R 0 (25) |
|
63 |
63 |
43 |
12 |
12 |
|
Здесь четыре неизвестных R63n , R63 , R12n , R12 . Касательные составляющие найдем, рассматривая отдельно равновесия звеньев.
τ3
n3
C1 
3
τ3
2 |
|
|
|
|
|
|
τ2 |
|
|
|
|
|
A1 |
|
|
τ2 |
n2 |
||
|
|
|
|
Рисунок 18