

Курсовой проект по дисциплине «Механика управляемых машин»
.pdf31
Рисунок 3.10
Рисунок 3.11

32
3.4.Позиционная система управления
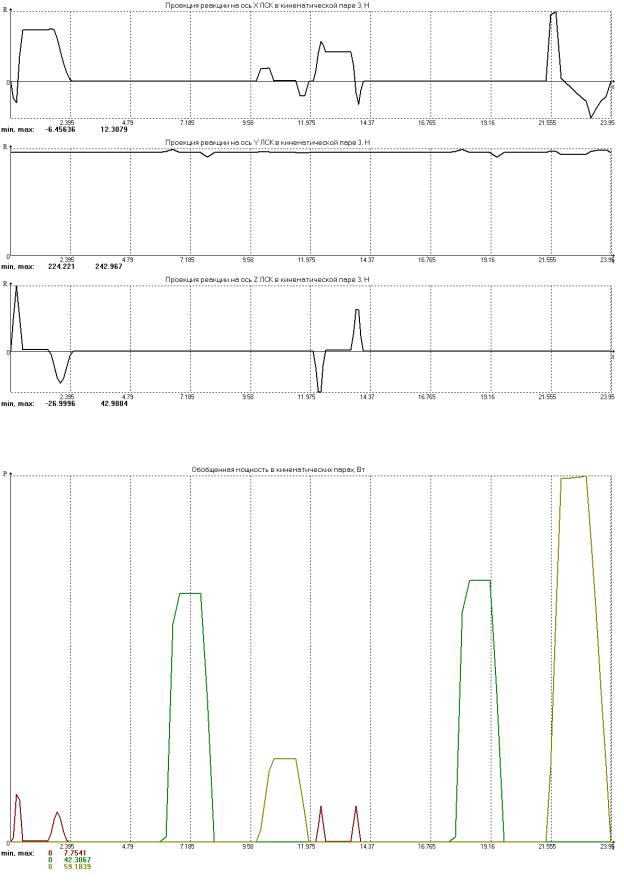
Рассмотрим движение манипулятора и изменение обобщенных параметров при позиционной системе управления. Графики, показывающие изменение обобщенных моментов и сил в кинематических парах приведены на рисунке 3.12. Возникающие при движение реакции и реактивные и моменты изображены на рисунке 3.13, 3.14, 3.15, 3.16, 3.17, 3.18. На рисунке 3.19 изображен графики изменения обобщенных мощностей за цикл работы манипулятора.
Рисунок 3.12
Рисунок 3.13

33
Рисунок 3.14
Рисунок 3.15

34
Рисунок 3.16
Рисунок 3.17
35
Рисунок 3.18
Рисунок 3.19

36
3.5.Контурная система управления
Рассмотрим движение манипулятора и изменение обобщенных параметров при контурной системе управления. Графики, показывающие изменение обобщенных моментов и сил в кинематических парах приведены на рисунке 3.20. Аппроксимированный слайном график изменения обобщенных моментов и сил изображен на рисунке 3.21 Возникающие при движение реакции и реактивные и моменты изображены на рисунке 3.22, 3.23, 3.24, 3.25, 3.26, 3.27. На рисунке 3.28 изображен график изменения обобщенных мощностей за цикл работы манипулятора.
Рисунок 3.20
Рисунок 3.21

37
Рисунок 3.22
Рисунок 3.23

38
Рисунок 3.24
Рисунок 3.25

39
Рисунок 3.26
Рисунок 3.27

40
Рисунок 3.28
Заключение
В курсовом проекте был решен ряд взаимосвязанных задач по исследованию функционирования робота-манипулятора при различных системах управления, был проведен:
Структурный анализ механизма
Кинематический анализ механизма; были определены функции обобщенных координат, скоростей и ускорений при разных системах управления
Кинестетический анализ механизма, в ходе которого были учтены инерционные параметры манипулятора, проведены силовые расчеты звеньев и определены реакции в кинематических парах, функции обобщенных сил, которые могут в некотором приближении служить основой для адаптивного управления
Расчет необходимых мощностей с учетом инерционных параметров при помощи программы CaDMan, реализующей решение всех рассматриваемых выше задач