

Курсовой проект по дисциплине «Механика управляемых машин»
.pdf21
На рисунке 2.21 изображены графики изменений обобщенной координаты S2 , обобщенной скорости V2 и ускорения a2 . Графики изменений обобщенной координаты 3 , обобщенной скорости 3 и ускорения 3 приведены на рисунке 2.22. В таблицах 7.7, 7.8, 7.9 приложения приведены данные изменения обобщенных координат, скоростей и ускорений.
Рисунок 2.21
Рисунок 2.22

22
Параметры движения рабочего органа (точки А) при контурном управлении приведены на рисунке 2.23 и в таблицах 7.10, 7.11, 7. приложения.
Рисунок 2.21
3.Кинетостатический анализ
Кинетостатика занимает промежуточное положение между динамикой и кинематикой. Кинетостатика изучает условия мгновенного равновесия системы тел, когда они совершают кинематически заданное движение. В основу кинетостатики положен принцип д`Аламбера. Уравнения системы, записанные на базе принципа д`Аламбера, отражают мгновенные состояния системы. Таким образом, в кинетостатике рассматриваются уравнения статического квазиравновесия систем тел, когда они совершают кинематически заданные движения.
Рассматриваемый в курсовом проекте манипулятор имеет кинематические пары 5-го класса, в них возникают пять составляющих реакций. Шестая составляющая соответствует обобщенной координате: во вращательных парах - это момент М , в поступательных парах –
усилие R . Эти составляющие являются обобщенными силами, управляющими движением механизма.
Для ряда положений по траектории рабочего органа:
a)решим обратную задачу кинематики и определим функции обобщенных координат, скоростей и ускорений
b)решим соответствующие прямые задачи кинематики и определим положения, скорости и ускорения звеньев и их центров масс
23
c)вычислим внешние силы (технологическую силу, приложенную к рабочему органу; силу тяжести звеньев; силы и моменты инерции)
составим уравнения равновесия сил и моментов F 0 |
М 0 . |
Решая эти уравнения для каждой кинематической пары, найдем все шесть составляющих реакций. Повторяя расчеты для ряда положений, найдем характер изменения реакций и функции обобщенных сил, обеспечивающих требуемое движение рабочего органа.
3.1.Инерционные параметры механизма
Для определения инерционных параметров воспользуемся данными таблицы 6 ТЗ, где приведены массы и моменты инерции звеньев в главной центральной системе координат (ГЦСК):
Таблица 3.1
m1, кг |
J1x, |
J1y, |
J1z, |
m2, кг |
J2x, |
J2y, |
J2z, |
m3, кг |
J3x, |
J3y, |
J3z, |
|
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
кг м2 |
||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
0,4 |
0,4 |
0,11 |
12 |
0,008 |
0,15 |
0,15 |
24 |
0,015 |
0,8 |
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
На рисунке 3.1 изображены внешние силы ( Px i 1 Pу i 1 P i 1 М х i 1 М у i 1 М i 1 ), действующие на выходное звено (3), суммарные проекции силы инерции и тяжести 3-го звена ( Fxi Fyi Fzi ), моменты сил инерции 3-го звена ( M 'xi M 'yi M 'zi ), искомые реакции в кинематической паре 3 ( Rxi Ryi Rzi M xi M yi M zi ). Для звена 3 величина M z3 является
обобщенной силой Q3 .
Инерционные моменты ( M 'xi M 'yi M 'zi ) определяются по следующей формуле:
M 'i Ji i ,
где i - вектор проекций угловых ускорений звена,
Ji - матрица моментов инерции в ЛСК.
Матрица моментов инерции в ЛСК:
Ji T i J i Т Тi ,
где T i - матрица поворота преобразования координат из i-й ГЦСК в i-ю ЛСК [1, с. 42],
J i - матрица моментов инерции в ГЦСК, тензор инерции.
Расположение i-й ГЦСК относительно i-й ЛСК задается: сдвигом – координатами начала ГЦСК в ЛСК xц.м. , yц.м. , zц.м. ; поворотом – углами Эйлера.

24
|
Ry3 |
|
|
|
|
|
My3 |
|
|
|
|
|
Fy3 |
|
|
|
|
|
Rz3 |
|
|
Py4 |
|
|
|
|
|
|
|
|
Mz3 M’ |
y3 |
F |
M |
y4 |
|
|
z3 |
|
||
Mx3 |
Rx3 |
|
M’z3 |
|
|
|
|
|
Pz4 |
||
|
|
|
|
||
|
|
|
Fx3 |
|
|
|
|
|
|
Mz4 |
|
|
M’x3 |
|
|||
|
|
|
M |
x4 |
Px4 |
|
|
|
|
|
|
Рисунок 3.1
Матрица тензора инерции симметрична, имеет размеры 3х3 и состоит из компонент главных и центробежных моментов. Поскольку моменты инерции рассчитываются в ГЦСК, то величины центробежных моментов обращаются в нуль, матрица тензора инерции таким образом симметричная, диагональная матрица:
|
J |
|
0 |
0 |
|
|
|
|
|
xi |
|
|
|
J i |
0 |
|
J yi |
0 |
. |
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
J zi |
|
Тензор инерции выходного звена 3:
|
|
0,15 |
0 |
0 |
|
|
|
|
|
|
|
J 3 |
|
0 |
0,8 |
0 |
. |
|
|
0 |
0 |
0,8 |
|
|
|
|
|||

25
|
|
Pz3 |
|
|
|
|
|
|
Fz2 |
Mz3 |
My3 |
Py3 |
|
||
Rz2 |
M’ |
|
|
|
M |
x3P |
|
Mz2 |
z2 |
|
|
|
x3 |
||
|
|
|
|
|
|||
Ry2 |
|
Fy2 |
|
|
|
||
|
M’ |
|
|
|
|||
|
|
|
y2 |
M’ |
F |
|
|
|
My2 |
|
|
x2 |
|
x2 |
|
|
Mx2 |
Rx2 |
|
|
|
||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Рисунок 3.2
На рисунке 3.2 изображены внешние силы ( Px 3 Pу 3 P 3 М х3 М у 3 М 3 ), действующие на звено 2, суммарные проекции силы инерции и тяжести 2-го звена ( Fx 2 Fy 2 Fz 2 ), моменты сил инерции 2-го звена ( M 'x2 M 'y 2 M 'z 2 ), искомые реакции в кинематической паре 2 ( Rx 2 Ry 2 Rz 2 M x2 M y 2 M z 2 ). Для звена 2 величина Rz 2 является обобщенной силой Q2 .
Тензор инерции звена 2:
|
|
0,008 |
0 |
0 |
|
|
|
|
|
|
|
J 2 |
|
0 |
0,15 |
0 |
|
|
|
0 |
0 |
0,15 |
|
|
|
|
На рисунке 3.3 изображены внешние силы ( Px 2 Pу 2 P 2 М х2 М у 2 М 2 ), действующие на звено 1, суммарные проекции силы инерции и тяжести 1-го звена ( Fx1 Fy1 Fz1 ), моменты сил инерции 1-го звена ( M 'x1 M 'y1 M 'z1 ), искомые реакции в кинематической паре 1 ( Rx1 Ry1 Rz1 M x1 M y1 M z1 ). Для звена 1 величина M z1 является обобщенной силой Q1 .

26
Pz2 |
|
|
Mz2 |
|
|
|
|
Py2 |
My2 |
|
|
|
|
Mx2 |
Fz1 M’ |
|
Px2 |
M’ |
Fy1 |
|
z1 |
y1 |
|
|
|
|
|
M’x1 |
Rz1 |
Fx1 |
|
|
Mz1 |
|
My1 |
Ry1 |
|
|
Mx1 |
|
|
Rx1 |
Рисунок 3.3
Тензор инерции звена 1:
|
|
0,4 |
0 |
0 |
|
|
|
|
|
|
|
J 2 |
|
0 |
0,4 |
0 |
|
|
|
0 |
0 |
|
|
|
|
0,11 |
|||
3.2.Уравнения равновесия. Определение управляющих сил
Звенья в пространственных механизмах – статически определенные системы. Согласно принципу д’Аламбера если к системе сил, действующих на систему тел, добавить инерционную нагрузку, то получившуюся систему можно рассматривать как находящуюся в состоянии квазиравновесия.
27
Рассмотрим равновесие 1-го звена. На рисунке 3.3 представлена расчетная схема.
Система уравнений равновесия для данного случая:
Fx 0 : R x1 Fx1 Px 2 0 ;
Fy 0 : R y1 Fy1 Py 2 0;
Fz 0 : R z1 Fz1 Pz 2 0;
M x 0 : Mx1 M 'x1 M x 2 Py 2
M y 0 : My1 M 'y1 M y 2 Px 2
M z 0 : Mz1 M 'z1 M z 2 0.
S1 Fy1 S1 / 2 0;
S1 Fx1 S1 / 2 0;
Общий алгоритм силового расчета:
Составляем систему уравнений для выходного звена. Решая данную систему, получим значения реакций и рективных моментов этого звена. После расчета рабочего звена переходим к расчету следующего звена манипулятора. Найденные реакции для кинематической пары между этими звеньями преобразуем в систему координат 2-го звена, получаем величины внешних сил и моментов для 2-го звена. К ним добавляем инерционные силы и моменты 2-го звена и составляем уравнение равновесия. После находим реакции в следующей кинематической паре, находим обобщенную силу, аналогичные операции проделываем для следующего звена. Описанный метод нахождения реакций в кинематических парах – общий алгоритм силового расчета в одном положении.
Повторяя расчеты для ряда положений, найдем характер изменения реакций и функции обобщенных сил, обеспечивающих требуемое движение рабочего органа. Функции обобщенных сил Mi (t), Ri (t) позволяют в первом приближении определить мощности, которые
должны развивать приводы манипулятора. Максимальные значения этих функций позволяют найти требуемую мощность двигателей.
Теперь, проведя силовой расчет, рассмотрим движение манипулятора при разных системах управления с учетом инерциальных параметров. Необходимо отметить, что найденные таким образом функции обобщенных сил отражают идеализированный случай управления и могут рассматриваться только как начальное приближение.
3.3.Цикловая система управления
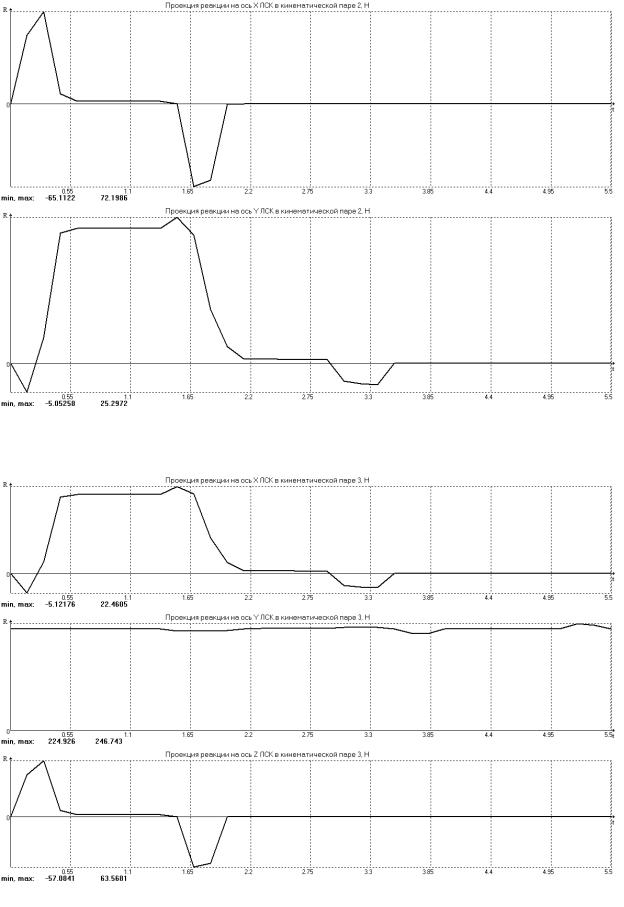
Рассмотрим движение манипулятора и изменение обобщенных параметров при цикловой системе управления. Графики, показывающие изменение обобщенных моментов и сил в кинематических парах приведены на рисунке 3.4. Возникающие при движение реакции и реактивные и моменты изображены на рисунке 3.5, 3.6, 3.7, 3.8, 3.9, 3.10. Для работы манипулятора необходим также такой параметр как обобщенная мощность в кинематических парах (см. рис. 3.11). Данные по обобщенным мощностям позволяют определить необходимую мощность исполнительного двигателя.

28
Рисунок 3.4
Рисунок 3.5
29
Рисунок 3.6
Рисунок 3.7

30
Рисунок 3.8
Рисунок 3.9