Оценка качества регулирования по лчх разомкнутой системы.

Гармоническое воздействие в области НЧ обрабатывается без ошибки.

Воздействия, спектр которых попадает в область ВЧ системой автоматического регулирования не обрабатываются.
От характера изменения частотной характеристики замкнутой системы в этом диапазон зависит и характер переходной характеристики.
Найдем связь формы частотной характеристики замкнутой системы с запасом устойчивости по фазе.

Найдем значение АЧХ замкнутой системы на ωСРдля некоторых значений ∆φ:
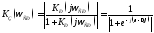



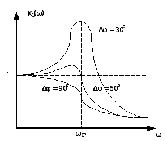
От запаса устойчивости по фазе ∆φ зависит величина подъёма в АЧХ замкнутой системы и, следовательно, величина перерегулирования. Чем меньше ∆φ, тем больше перерегулирование.
Эмпирическая формула:

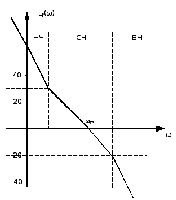
Чтобы обеспечить запас устойчивости от 30о до 70о требуется, чтобы ЛАХ разомкнутой системы пересекала ось частот под наклоном -20 дБ/дек и длина участка с таким наклоном составляла ≈1,5 декады.

Временные параметры переходной характеристики можно связать с ωСР:

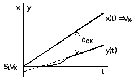
Оценка качества регулирования при полиномиальном воздействии.
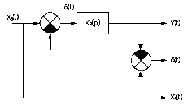
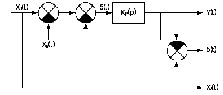
δ(t) – ошибка
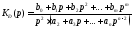
Связь ошибки:

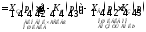
Разложим KОШ(p):





Ошибки:
Статическая ошибка.


Скоростная ошибка.


Ошибка по ускорению.


Найдем коэффициенты разложения:


Коэффициенты:

По значению коэффициента S0 все системы авторегулирования делятся на 2 класса:
статические S0≠0;
астатические S0=0.
Для астатических систем вводят порядок астатизма, который равен количеству первых нулевых коэффициентов.
Ошибки в статических и астатических системах.
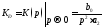
Статические системы.
Коэффициент передачи разомкнутой системы:




Возрастание во времени скоростной ошибки и ошибки по ускорению ограничивает область применения статических систем только системами стабилизации (т.е. системами, поддерживающими значение какого-либо параметра постоянными).
Астатические системы 1-го порядка.


Замкнутая система является астатической, если в состав разомкнутой системы входит интегратор.
Коэффициент передачи разомкнутой системы:



Так как скоростная ошибка постоянная, то астатические системы 1-го порядка могут использоваться как следящие системы.
Астатические системы 2-го порядка.


Порядок астатизма в замкнутой системе равен количеству интеграторов в разомкнутой системе.
Коэффициент передачи разомкнутой системы:





Ошибки определяются только слагаемыми низшего порядка передаточной функции разомкнутой системы: 1) статическая – a0 и b0; 2) скоростная – a0, b0, a1,b1; 3) по ускорению – a0, b0, a1,b1, a2, b2.
Чем выше порядок астатизма, тем меньше ошибки при обработке полиномиального воздействия. Но повышение порядка астатизма нецелесообразно, потому что затрудняет повышение устойчивости системы и потому, что существуют ошибки при других воздействиях.
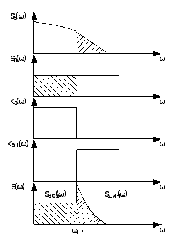
Ошибки при случайных воздействиях.

Это выражение показывает линейную связь между входными и выходными величинами. Выражение для энергетического спектра ошибки, при условии, что хЗ(t) и хВ(t) некоррелированы:

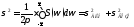

Возмущающее воздействие широкополосно и имеет постоянную спектральную плотность в пределах полосы пропускания, поэтому его можно считать белым шумом.
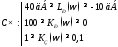
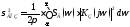
Двусторонняя спектральная плотность:



Эффективная шумовая полоса:

Как правило, изменение какого-либо параметра системы (коэффициента передачи, постоянной времени) приводит к взаимообратным изменениям дисперсии ошибок, поэтому существует оптимальное значение параметра, обеспечивающее минимум суммарной ошибки.
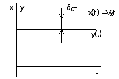
Покажем это на примере влияния полосы пропускания замкнутой системы на дисперсию ошибки.
ωГР– частота, при которой динамическая ошибка будет минимальной.