

Метод гармонической линеаризации.
Метод гармонической линеаризации используется для анализа гармонических процессов в системах с разделяющимися нелинейными и линейными частями. Причем линейная часть должна быть настолько узкополосна, что может пропускать только первую гармонику колебания.
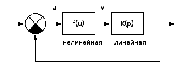

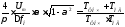
Первая гармоника:

Нелинейный элемент системы заменяется линейным, коэффициент передачи которого равен отношению комплексной амплитуды первой гармоники на выходе нелинейного элемента к амплитуде сигнала на входе нелинейного элемента.

Для нахождения комплексной амплитуды обычно находят синфазную и квадратурную составляющие первой гармоники.





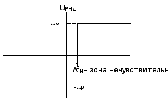
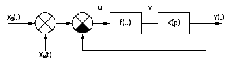
Найдем условие возникновения колебаний в релейной системе АПЧ.

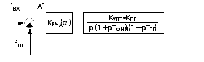
Найдем коэффициент передачи релейного частотного дискриминатора.




Подынтегральное выражение:






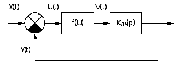
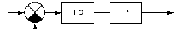
Составим линейную модель системы РПЧ:
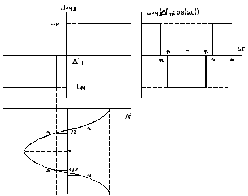
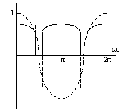
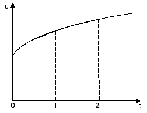
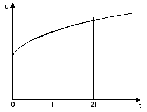
По критерию Найквиста для систем на грани устойчивости:






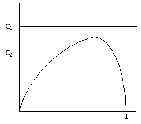
При С=С1 – автоколебания не возникают.
При С=С2 – будут автоколебания.
Метод статистической линеаризации.
Статистическая линеаризация используется для расчета случайных ошибок в нелинейных системах и определений условий срыва слежения при наличие мощных случайных помех.
Линейные и нелинейные части должны разделяться.
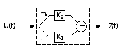
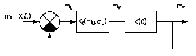
Заменим нелинейный элемент эквивалентным ему линейным:


Считается, что все случайные процессы можно представить в виде суммы медленно меняющегося математического ожидания и центрированного случайного процесса.



Эквивалентность процессов v(t) и z(t) понимается только в рамках числовых показателей, как правило, математического ожидания и дисперсии.


Обычно используется 2 критерия эквивалентности:
равенство математического ожидания и дисперсии процессов v(t) и z(t);
критерий минимума среднеквадратического отклонения процессов v(t) и z(t).

1 критерий:



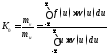



2 критерий:



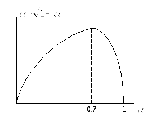
Находим минимум подбором К0 и К1:



Рассмотрим методику расчета ошибок в нелинейной системе при случайном воздействии.
Так как возмущающее воздействие широкополосно и математическое ожидание равняется нулю:

Так как задающее воздействие – медленно меняющаяся функция, ее можно считать постоянной:

Так как нелинейный элемент заменяется двумя линейными для математического ожидания и для центрирующего случайного процесса, то исходная схема заменяется двумя моделями.
Модель для математического ожидания:
Модель для центрированной случайной величины:
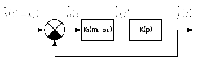
Параметры ошибки u(t), т.е. математическое ожидание и дисперсия являются решением системы уравнений, описывающих эти модели.
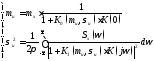
SX(ω) - энергетический спектр входного воздействия.
Срыв слежения можно определить по неограниченному возрастанию дисперсии ошибки при увеличении дисперсии входного воздействия.
Импульсные, цифровые и дискретные системы автоматики.
Импульсные системы.
Импульсными называются системы, в которых информация в какой-либо точке передается с помощью импульсной модуляции. Может использоваться любой тип модуляции, но чаще всего амплитудный.
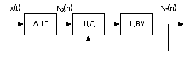
Приведенная структурная схема импульсной системы:
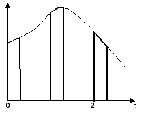
АИМ-1:
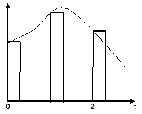
АИМ-2:
Системы АИМ-1 – системы с конечным временем съема данных.
Цифровые системы.
Цифровыми называются системы, в которых в какой-либо точке информация передается с помощью КИМ (кодоимпульсной модуляции), т.е. в цифровом виде.
Цифровые системы делятся на 2 типа:
полностью цифровые, в которых аналого-цифровое преобразование производится до дискриминатора, а вся система реализуется как специализированный вычислитель.
аналого-цифровые системы, в которых АЦП и ЦАП находятся внутри контура регулирования.

Дискретные системы.
Дискретные системы являются математической моделью, к которой при некоторых условиях можно свести импульсные и импульсно-цифровые системы.
В дискретной системе сигналы представляются в виде отсчетов в дискретный момент времени, имеющих любое значение.
Дискретная:
Импульсная:

Цифровая:
Импульсную систему можно свести к дискретной, если длительность импульсов мала по сравнению с периодом. Цифровую систему можно свести к дискретной, если шаг квантования мал.