

Синтез_мех_систем
.pdfбыть выявлена такая ситуация. В этом случае, необходимо, используя алго-
ритм решения задачи первого этапа попытаться найти "новые" управляющие переменные, удовлетворяющие заданным ограничениям. Иными словами,
необходимо решить задачу управления в стохастической постановке.
91
5.3 Решение задачи отделения головного обтекателя
5.3.1 Основные требования к процессу отделения
Головной обтекатель предназначен для защиты КА от теплового и сило-
вого воздействия набегающего потока при прохождении РН плотных слоев атмосферы. Когда скоростной напрор становиться практически равным ну-
лю, ГО становиться пассивным элементом конструкции и должен быть отде-
лен от РН. Отделение ГО осуществляется при помощи специальной системы.
Система состоит из механических рычажных замков крепления ГО к пере-
ходному отсеку РН, замков крепления створок ГО по продольному стыку, уз-
лов вращения створок с механизмами их освобождения , толкателей разворо-
та створок и элементов электроавтоматики.
Процесс отделения ГО происходит следующим образом. По команде от системы управления РН срабатывают пиротолкатели раскрытия замков попе-
речного и продольных стыков ГО. После этого под действием усилий толка-
телей разворота створок и инерционных сил, створки разворачиваются отно-
сительно узлов вращения. При достижении заданного угла, кинематическая связь створок с переходным отсеком РН в узлах вращения нарушается и да-
лее створки под действием инерционных сил отделяются от РН.
При проектировании системы отделения ГО решаютсяч следующие ос-
новные задачи. Выбор энергетических харктеристик пиротолкателей для га-
рантированного раскрытия замков. Динамический расчет тяг замков и опре-
деление их несущей способности. Выбор энергетических характеристик тол-
кателей разворота створок и определение угла поворота створок при котором нарушается связь. Расчет кинематичских параметров отделения ГО, проверка безударности отделения, т.е. обеспечение движения створок в заданной зоне,
ограниченной конструкцией РН.
Движение створок ГО при отделении условно разбивается на 3 участка:
–участок движения створок под действием усилий толкателей их раз-
ворота и инерционных сил;
92

–участок вращения створок отностительно осей вращения под действи-
ем инерционных сил;
– участвок свобоюного движения створок под действием инерционных
сил.
При расчете процесса отделения створок принимают следующие допуще-
ния:
–движение створок плоское;
–створки ГО абсолютно твердые тела;
–аэродинамические силы отсутствуют (в случае отделения ГО в потоке аэродинамические силы учитываются);
–осевые перегрузки РН на участке отделения створок постоянные;
–параметры возмущенного движения РН на участке отделения нуле-
вые.
5.3.2 Уравнения движения и выбор угла отделения створок
Расчетная схема движения створки на первом участке приведена на ри-
сунке 5.18.
В соответсвии с расчетной схемой, уравнение движения створки имеет следующий вид:
J 2PT (l)h mnx g Rcos( ) |
(5.3.1) |
где:
J – момент инерции створки относительно оси вращения;
PT(l) – усилие толкателя в зависимости от хода;
R – радиус-вектор центра масс створки; m – масса створки.
93

|
x |
|
|
nx mg |
R |
|
|
|
o' |
|
|
|
r |
|
|
lo |
r |
|
|
|
|
|
|
x |
|
1 |
|
h |
|
|
|
|
0 |
y |
|
|
|
|
|
a |
|
ось вращения |
|
|
|
|
|
|
|
допустимая зона |
|
|
|
траектории опасной точки |
|
РН |
|
f xO.T , yO.T |
0 |
|
|
|
Рисунок 5.18 – Расчетная схема движения створки на первом участке
Из векторного равенства согласно рисунку 5.18:
94
|
|
|
|
|
|
|
|
|
l |
a |
r, имеем |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
l |
|
a 2 |
r2 |
2ar cos( |
1 |
), |
1 |
|
|
|
|
|
|
|
|
||
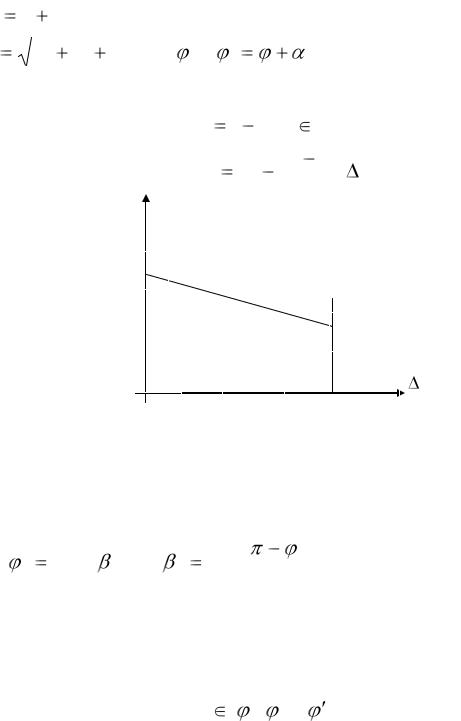
Диаграмма усилия толкателя является линейной функцией, рисунок 5.19  l l0 ,
l l0 ,  [0, LT ];
[0, LT ];
PT P0 |
P0 |
PK |
. |
|
hT |
||
|
|
|
Po
PK
0 |
hT |
|
|
Рисунок 5.19 – Диаграмма изменения усилия толкателя |
|
Из рисунка 5.18 также следует, что можно найти h в функции угла пово- |
|
рота створки. |
|
h( ) a sin( ), sin( ) |
r sin( |
1 ) |
. |
|
|
||
|
|
l |
|
Обычно задача заключается в подборе количества толкателей из имею-
щейся номенклатуры (либо разработки нового толкателя) чтобы оьеспечи-
вался необходимый момент для преодоления момента инерционных сил
(участок поворота створки  [ 0 , 0
[ 0 , 0  0 ]) и обеспечению допустимой зоны траектории опасной точки. Это требование безударности отделения. Но зона выхода такж зависит и от угла поворота створки при которомтеряется связь. Найдем этот угол.
0 ]) и обеспечению допустимой зоны траектории опасной точки. Это требование безударности отделения. Но зона выхода такж зависит и от угла поворота створки при которомтеряется связь. Найдем этот угол.
Уравнение движения створки (5.3.1) запишем в другом виде
95

J |
d |
|
|
nx mgR cos( |
) |
|
MT ( |
), |
или |
|
||||
dt |
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||
2 |
|
|
|
|
|
|
|
|
|
T |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
J |
|
|
|
|
|
|
nx mgR sin( |
) |
|
MT ( )d |
, т.е. |
|||
|
|
|
|
|
|
|
||||||||
|
|
|||||||||||||
2 |
|
|
|
|
|
|
|
0 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0 |
|
|
|
|
0 |
|
|
||||
|
|
|
|
|
|
|
||||||||
2 |
|
|
|
|
|
|
|
|
||||||
J |
|
|
nx mgR(sin( |
0 ) |
|
sin( |
)) |
AT |
(5.3.2) |
|||||
|
|
|||||||||||||
2 |
|
|
|
|
|
|
|
|
||||||
где:
АT – суммарная работа толкателей разворота створки.
Поскольку отрицательная, из (5.3.2) следует, что
|
|
|
2 B(sin |
|
|
sin |
AT |
) |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
; B |
n |
|
m g R. |
|
|
|||
|
|
|
|
|
|
|
J |
|
X |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Поскольку |
|
= |
|
( ), используя |
формулу Эйлера V |
R или |
|||||||||
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
R) |
y |
|
|
R sin |
найдем выражение для скорости ЦМ створки |
||||||||||
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вдоль оси ОY и определим ее максимальное значение. Именно в этот момент и не ранее необходимо нарушить кинематическую связь в узле вращения.
Имеем
|
|
2 B(sin |
|
sin |
AT |
) |
|
|
0 |
|
|
|
|||||
|
|
|
|
B |
|
|
||
Vy R sin |
|
|
|
(5.3.3) |
||||
|
|
J |
|
|
||||
|
|
|
|
|
|
|
|
|
Отсюда используя необходимые условия экстремума найдем
Vy |
maxVy ( |
|
) , т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vy |
|
|
|
|
|
|
|
2 B(sin |
|
|
sin |
|
AT |
) |
|
|
|||||
|
|
|
|
0 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0, cos( |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin( |
) cos( |
) |
|
|
|
|
|
|
B |
|
|
|
|
|
|
0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
2 B(sin |
|
|
sin |
AT |
) |
|
|
|
||||||
|
|
|
|
|
0 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
||||||||
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда получаем условие экстремума |
|
|
|
|
|
|
|
|
|
|||||||||||||
1. cos( |
)=0, = |
|
/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
96

2. 2B(sin o – sin |
+ AT/B)–B sin ( |
)=0, или |
|
||
sin |
= 2(sin |
+ AT/B)/3 (5.3.4) |
|
|
|
Первое условие дает локальный минимум, а второе – максимум. |
|||||
Для |
одного |
из |
имеющихся |
ГО с |
характеристиками mст=576кг, |
Jo=3900кгм2, R=3.3м (Xцт=3.2м, Yцт=0.73м , |
'o=13o) четырех толкателей на |
||||
створку с характеристиками P0=600кГ, Pк=600кГ, hT=0.495м и осевой пере-
грузке nx=1.3g будем иметь AT=4 0.5 (600+100) 0.495=690кГм,
J=Jo+mR2=3900+576 3.32=10170кГм2, В=1.3 576 9.81 3.3=24241,
АТ/В=0.28 и |
arcsin( |
2 |
(sin1030 |
0.28)) 560 , т.е. створка ГО, при |
|
3 |
|||||
|
|
|
|
ее повороте на 47о от ее исходного положения должна быть освобождена от связи в узле вращения чтобы скорость ЦМ ее вдоль оси OY была максималь-
ной. Поскольку освобождение от связи должно происходить только при ус-
ловии, что к этому моменту реакция (Ry) в оси вращения отрицательная (из-
бежание скольжения опоры по переходному отсеку), это условие необходимо проверить.
Согласно принципу Даламбера из рисунка 5.20 следует:
R |
y |
m |
2 R cos( ) mR sin( ) 0 (5.3.5) |
|
|
|
|
|
|
|
x |
|
|
|
Mин |
|
|
|
m 2R |
|
|
|
mR '' |
|
|
|
1.1.1 |
|
|
|
nxgm |
|
|
|
1.1.2 |
Ry |
y |
|
Рисунок 5.20 – К определению реакций в опоре
97

Подставляя в (5.3.5) значения и  соответсвующие Vymax (
соответсвующие Vymax ( *) по-
*) по-
лучим
R |
|
m R cos( *) |
2B |
(sin |
|
sin * |
AT |
) |
mR sin * |
m n x g |
R cos( *) 0 |
y |
|
o |
|
|
|||||||
|
|
J |
|
|
B |
|
J |
||||
|
|
|
|
|
|
|
|||||
R y |
m R cos( *)[ |
2B |
(sin |
|
sin * |
AT |
|
B |
sin( *)] |
0 |
J |
o |
B |
|
J |
||||||
|
|
|
|
|
|
|
|
|||
|
Выражение в квадратных скобках равно нулю, а при |
< * Ry<0, т.е. на- |
||||||||
рушение связи в оси вращения створки должно происходить не ранее дости-
жения угла поворота = *. Величина угла поворота створки, при котором
происходит освобождение кинематической связи ( КС) выбирается из усло-
вия гарантированного выполнения условия f xOT ( KC ), yOT ( KC ) 0 .
После потери кинематической связи створка будет совершать свободное движение под действием силы инерции. В "падающей" с ускорением nxg сис-
теме координат (0X1Y1) траектория опасной точки будет описывать циклои-
ду, рисунок 5.21.
98

x
0 |
РН |
x1 |
V |
* |
y |
траектория опасной точки
Рисунок 5.21 – Траектория опасной точки
99
5.4 Решение задачи раскрытия антенн
5.4.1 Основные требования к процессу раскрытия антенны
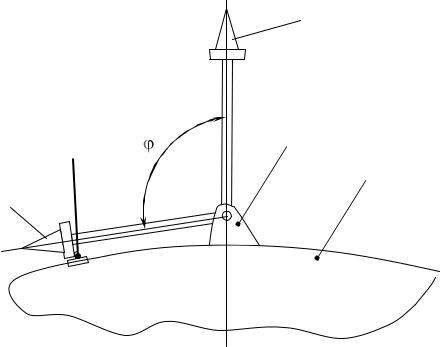
После выведения КА на рабочую орбиту осуществляется раскрытие ан-
тенн, т.е. приведение их в рабочее положение. Это осуществляется специаль-
ными системами. Конструктивно антенна А устанавливается на конце штан-
ги (стержня) определенной длины, другой конец которой закреплен шарнир-
но на отсеке КА. Здесь же находится и энергопривод, осуществляющий по-
ворот этой штанги относительно шарнира на заданный угол и механизм фик-
сации штанги в рабочем положении. Схематично это показано на рис. 5.22.
Рис. 5.22 Схема установки антенны
А
Привод
Фиксатор
К
А
Освобождение штанги, поворот и фиксация ее в рабочем положении осу-
ществляется специальной системой, состоящей из энергопривода, элементов фиксации штанги в первоначальном и рабочем положении.
Процесс раскрытия антенны с точки зрения механики твердого тела имеет одну степень свободы, и подобрать энергию привода, достаточную для по-
ворота штанги на заданный угол, преодолев при этом усилие сопротивления кабелей, трения и сопротивление фиксирующего механизма не представляет
100