

Билет №25
.docxБ И Л Е Т № 25
1. Естественные и искусственные механические характеристики асинхронных электроприводов.
Мощность,
передаваемую ротору, можно разделить
на две составляющие: мощность, преобразуемую
в механическую
 и мощность потерь
и мощность потерь
 в роторе. Первая составляющая может
быть определена следующим образом:
в роторе. Первая составляющая может
быть определена следующим образом:
 .
Вторая составляющая представляет собой
электрические потери в обмотках ротора
и потери на перемагничивание ротора.
Как правило, потери в стали ротора
существенно меньше электрических
потерь, в связи с чем первыми можно
пренебречь. Тогда:
.
Вторая составляющая представляет собой
электрические потери в обмотках ротора
и потери на перемагничивание ротора.
Как правило, потери в стали ротора
существенно меньше электрических
потерь, в связи с чем первыми можно
пренебречь. Тогда:
 или
или
 .
Отсюда:
.
Отсюда:
 .
Учитывая что
.
Учитывая что
 ,
где
,
где
 .
Можно записать выражение для момента
в виде:
.
Можно записать выражение для момента
в виде:
 (1)
, где
(1)
, где
 -
действующее значение фазного напряжения
сети, В;
-
действующее значение фазного напряжения
сети, В;
 -
фазный приведенный ток ротора, А;
-
фазный приведенный ток ротора, А;
 -
активное фазное сопротивление обмоток
ротора, приведено к обмотке статора;
-
активное фазное сопротивление обмоток
ротора, приведено к обмотке статора;
 -
приведенное к обмотке статора активное
фазное сопротивление, включенное
последовательно в цепь обмотки ротора,
Ом; имеется в виду, что в фазах включены
симметричные последовательные
сопротивления.
-
приведенное к обмотке статора активное
фазное сопротивление, включенное
последовательно в цепь обмотки ротора,
Ом; имеется в виду, что в фазах включены
симметричные последовательные
сопротивления.
Из
(1) следует,
что для определения зависимости
 асинхронного
двигателя необходимо знать характеристику
асинхронного
двигателя необходимо знать характеристику
 .
С целью вывода уравнений этой
характеристики, обратимся к схеме
замещения, из которой следует:
.
С целью вывода уравнений этой
характеристики, обратимся к схеме
замещения, из которой следует:
 (2)
где:
(2)
где:
 -
индуктивные фазные сопротивления,
обусловленные полями рассеяния обмоток
статора и ротора; последнее приведено
к обмотке статора, Ом;
-
индуктивные фазные сопротивления,
обусловленные полями рассеяния обмоток
статора и ротора; последнее приведено
к обмотке статора, Ом;
 -
индуктивное фазное сопротивление
короткого замыкания.
-
индуктивное фазное сопротивление
короткого замыкания.
Выражение
(1) представляет
собой уравнение скоростной характеристики
двигателя
 ,
так как скольжение
,
так как скольжение
 однозначно определяет величину скорости
двигателя по формуле:
однозначно определяет величину скорости
двигателя по формуле:
 (3).
(3).
Для асинхронного двигателя обычно под скоростными и механическими характеристиками понимаются зависимости тока и момента от скольжения. В этом случае соответствующие уравнения получают более компактную форму записи и оказываются удобными для вычислений.
Подстановка (2) в (1) дает уравнение механической характеристики:
 (4)
(4)
Анализ
этого выражения показывает, что
зависимость
 имеет
максимум, так как при скольжении
имеет
максимум, так как при скольжении
 и
и

 .
Максимальное значение момента
.
Максимальное значение момента
 ,
развиваемое двигателем, принято называть
критическим, соответствующее ему
скольжение
,
развиваемое двигателем, принято называть
критическим, соответствующее ему
скольжение
 так
же называется критическим. Согласно
общему правилу нахождения экстремума
функции для определения
так
же называется критическим. Согласно
общему правилу нахождения экстремума
функции для определения
 необходимо
решить уравнение вида
необходимо
решить уравнение вида
 ,
подставив в него (4).
Решение этого уравнения дает:
,
подставив в него (4).
Решение этого уравнения дает:
 (5).
(5).
Подставляя
 в (4)
находим:
в (4)
находим:
 (6).
(6).
Знак
 в (5)
означает, что максимум момента может
иметь место при
в (5)
означает, что максимум момента может
иметь место при
 в двигательном режиме или в режиме
противовключения и при
в двигательном режиме или в режиме
противовключения и при
 в генераторном режиме. Знак + в (6)
соответствует
в генераторном режиме. Знак + в (6)
соответствует
 ,
а -
,
а -
 .
.
Из
(4)
и (5)
с учетом (6)
может быть получена другая формула для
механической характеристики:
 (7)
где:
(7)
где:
 .
.
Для
крупных машин
 невелико,
поэтому практически
невелико,
поэтому практически
 и
и
 .
Поэтому (7)
можно представить как:
.
Поэтому (7)
можно представить как:
 (8)
где
(8)
где
 (9)
;
(9)
;
 (10).
(10).
Преимущество
записи уравнения механической
характеристики в виде (7)
по сравнению с (4)
в том, что для (7)
достаточно знать лишь параметры, которые
обычно указывают в каталогах, или которые
могут быть найдены по данным каталогов,
так как
 и
и
 обычно
неизвестны.
обычно
неизвестны.
Естественная характеристика:
 -
критические моменты в двигательном и
генераторном режимах.
-
критические моменты в двигательном и
генераторном режимах.


Увеличение
сопротивления ротора
 приводит в соответствии с (9)
к увеличению критического скольжения,
а критический момент
приводит в соответствии с (9)
к увеличению критического скольжения,
а критический момент
 остается неизменным (10).
Увеличение
остается неизменным (10).
Увеличение
 и
и
 уменьшает
уменьшает
 и
и
 (рис.3).
(рис.3).


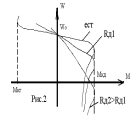
Форма
механических характеристик при
 и
и
 показана на рис.4. Она определяется
соотношениями (9)
и (10),
из которых следует, что скольжение
показана на рис.4. Она определяется
соотношениями (9)
и (10),
из которых следует, что скольжение
 при этом остается неизменным, а критический
момент уменьшается пропорционально
квадрату напряжения. В соответствии с
(10),
увеличение
при этом остается неизменным, а критический
момент уменьшается пропорционально
квадрату напряжения. В соответствии с
(10),
увеличение
 приводит к уменьшению критического
момента из-за увеличения
приводит к уменьшению критического
момента из-за увеличения
 и повышения индуктивного сопротивления
рассеяния, соответствующего искусственной
характеристике
и повышения индуктивного сопротивления
рассеяния, соответствующего искусственной
характеристике
 .
Критическое скольжение при этом так же
уменьшается, а скорость идеального
холостого хода увеличивается, как
показано на рис.5.
.
Критическое скольжение при этом так же
уменьшается, а скорость идеального
холостого хода увеличивается, как
показано на рис.5.
2. Контур регулирования тока с моделью.
В адаптивном регуляторе тока используется модель. Использование эталонной модели позволяет:
-
приблизить САР к оптимальной при неточной настройке параметров, их нестабильности, то есть облегчает наладке ЭП;
-
уменьшает отрицательное влияние внутренней обратной связи по ЭДС;
-
улучшает качество САР в зоне прерывистых токов.
Эталонный
процесс с выхода модели сравнивается
на входе апериодического звена с
фактическим процессом по
 .
Сигнал сравнения корректирует
.
Сигнал сравнения корректирует
 на выходе усилителя с апериодическим
звеном, таким образом, чтобы фактический
процесс стремился к стандартному.
на выходе усилителя с апериодическим
звеном, таким образом, чтобы фактический
процесс стремился к стандартному.
 ,
,
 ,
,

Коэффициент
 уточняется при наладке и моделировании
ЭП, но при условии обеспечения устойчивой
работы внутреннего контура не должен
превышать
уточняется при наладке и моделировании
ЭП, но при условии обеспечения устойчивой
работы внутреннего контура не должен
превышать
 ,
,
где
 -
пульсность схемы;
-
пульсность схемы;
 (при
(при
 ).
).
Схема реализации эталонной модели – на правом рисунке.



Решая
эту систему уравнений, получаем:



 -
частота пропускания нашего фильтра,
-
частота пропускания нашего фильтра,
 - полоса пропускания.
- полоса пропускания.



При
 (принимаем
(принимаем
 ).
).
 .
.
3. Начертить и пояснить нагрузочную диаграмму и тахограмму работы электропривода моталки при намотке одного рулона.


