Билет №23
.docxБилет23
1. Уравнение механической характеристики асинхронных электроприводов.
Для ввода уравнения механической характеристики асинхронного двигателя можно воспользоваться упрощенной схемой замещения приведенной на рисунке, где приняты следующие обозначения: Uф – первичное фазное напряжение; I1 – фазный ток статора; I/2 – приведенный ток ротора; Х1 и Х2 – первичное и вторичное приведенные реактивные сопротивления рассеяния; R0 и Х0 – активное и реактивное сопротивления контура намагничивания; s = ( 0 - ) / 0 – скольжение двигателя; 0 = 2 n0 / 60 – синхронная угловая скорость двигателя; 0 = 2 f1 / p; R1 и R/2 – первичное и вторичное приведенные активные сопротивления; f1 – частота сети; р – число пар полюсов.
Упрощенная схема замещения асинхронного двигателя

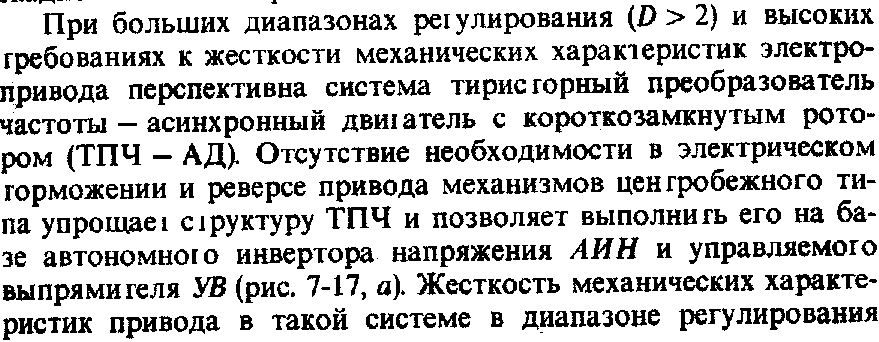
В соответствии с
приведенной схемой замещения можно
получить выражение для вторичного тока
Момент асинхронного двигателя может быть определен из выражения потерь М0 s = 3 (I/2)2 R/2 , откуда М = 3 (I/2)2 R/2 / 0 s.
Подставляя значение
I/2
получим

Кривая момента М = f ( s ) имеет два максимума: один – в генераторном режиме, другой – в двигательном.
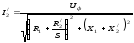
Приравнивая dM/ds = 0, определяем значение критического скольжения sк , при котором двигатель развивает максимальный ( критический ) момент
Подставляя значение sк находим значение для максимального момента

Знак << + >> относится к двигательному режиму (или торможению противовключением ), знак << - >> - к генераторному режиму работы с сетью (при > 0 ).

Здесь подчеркнуть весьма важное для практики обстоятельство – влияние изменения напряжения сети на механические характеристики асинхронного двигателя. Момент двигателя пропорционален квадрату напряжения, по этому двигатель этого типа чувствителен к колебаниям напряжения сети.
Критическое скольжение и угловая скорость идеального холостого хода не зависит от напряжения.
На рисунке приведена механическая характеристика асинхронного двигателя. Ее характерные точки:
-
s = 0; М = 0, при этом скорость двигателя равна синхронной;
-
s = sном; М = Мном , что соответствует номинальной скорости и номинальному моменту;
-
s = sк; М = Мк. д – максимальный момент в двигательном режиме;
-
s = 1.0;
 - начальный пусковой момент;
- начальный пусковой момент; -
s = - sк; М = - Мк.г – максимальный момент в генераторном режиме работы параллельно с сетью.
При s > 1.0 двигатель работает в режиме торможения противовключением, при s < 0 имеет место генераторный режим работы параллельно с сетью.
Необходимо отметить, что абсолютные значения Sк в двигательном и генераторном параллельно с сетью режимах одинаковы.
Однако максимальные
моменты в двигательном и генераторном
режимах различны. В генераторном режиме
работы параллельно с сетью максимальный
момент по абсолютному значению больше,
чем следует из соотношения

где Хк = Х1 + Х/2.
Если
в уравнении пренебречь активным
сопротивлением статора, то получится
формула, более удобная для расчетов:

здесь Sк = R/2 / Хк; Мк =3 U2ф / 20 Хк.
2. Построение позиционной системы подчиненного регулирования
В
соответствии с принципами подчиненного
регулирования, объект содержит три
последовательных звена. В соответствии
с этим САР трехконтурная.
 .
.
Упрощенная структурная схема трехконтурной САР:
Здесь
задатчик интенсивности (ЗИ) ограничивает
 или
или
 на допустимом уровне. Возможны варианты
без ЗИ.
на допустимом уровне. Возможны варианты
без ЗИ.
-
Построение контуров тока и скорости.
-
Контур регулирования тока.





 .
.
-
Контур регулирования скорости.
 П
регулятор (пропорциональный).
П
регулятор (пропорциональный).
При
наличии нагрузки, имеется статическая
ошибка
 ,
которая определяет статическую ошибку
положения или перемещения. Если
,
которая определяет статическую ошибку
положения или перемещения. Если
 ,
то используют пропорционально-интегральный
(ПИ) регулятор скорости (или
пропорционально-дифференциальный).
,
то используют пропорционально-интегральный
(ПИ) регулятор скорости (или
пропорционально-дифференциальный).
 ;
;

 ;
;
-
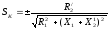
Построение контура регулирования положения.
Основные требования САР положения: максимальное быстродействие, отсутствие перерегулирования в положениях. Эти требования для всех возможных режимов работы, при использовании линейного пропорционального регулятора положения могут не выполняться.
 если
все
если
все
 линейны.
линейны.
Различают следующие режимы работы позиционных САР:
-
Режим малых перемещений. В нем система линейна, то есть не проявляется ни одно из ограничений.
-
Режим средних перемещений. В этом случае ЗИ ограничивает
 на допустимом уровне
на допустимом уровне
 .
.
Если
нет ЗИ, то осуществляется работа под
отсечку, то есть ограничен допустимый
ток. При работе с ЗИ так же возможна
работа под отсечку. Скорость не доходит
до

-
Режим больших перемещений. Скорость доходит до
 ,
то есть
,
то есть
 ,
которую определяет блок ограничения.
Здесь проявляются и другие ограничения
,
которую определяет блок ограничения.
Здесь проявляются и другие ограничения
 и тока.
и тока.
3. Проанализировать САР электроприводов, применяемые в механизмах центробежного типа. Каковы их достоинства и недостатки?




![]()