

Билет №21
.docxБ И Л Е Т № 21
1. Перегрузочная способность электроприводов с двигателями постоянного тока.
Для двигателей постоянного тока различают перегрузочную способность по току и по моменту;
По току:
 ;
по моменту:
;
по моменту:
 .
Для большинства ДПТ =2,5
и определяется коммутационной
устойчивостью двигателя.
.
Для большинства ДПТ =2,5
и определяется коммутационной
устойчивостью двигателя.
Перегрузочная
способность ограниченна условиями
коммутации тока якоря коллектором.
Перегрузка по току приводит к возрастанию
искрения на щетках. При большом токе
искрение достигает опасных размеров,
и как следствие, круговой огонь по
коллектору. Наибольшее значение тока,
при котором обеспечивается удовлетворительная
коммутация, ограничивает предельно
допустимые значения момента двигателя
 .
Кроме того, должно выполняться условие:
.
Кроме того, должно выполняться условие:
 .
Собственно должна быть ограничена и
максимальная скорость изменения момента
двигателя. Перегрузочная способность
зависит от скорости вращения:
.
Собственно должна быть ограничена и
максимальная скорость изменения момента
двигателя. Перегрузочная способность
зависит от скорости вращения:
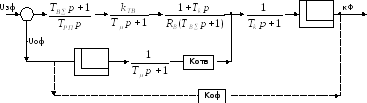
2. Построение САР двухзонного регулирования по каналу обмотки возбуждения.
Построение начинается с внутреннего контура регулирования тока возбуждения (потока)
 ;
;
 ;
;
 ;
ТВ=ТВ+Тк;
Тк=0,1Тв
;
;
ТВ=ТВ+Тк;
Тк=0,1Тв
;
 ;
;
 ;
;
Внешним контуром является контур регулирования ЭДС при <н регулятор ЭДС нах-ся в насыщении


3. Особенности реализации узла компаундирования в САР непрерывных станов холодной прокатки.
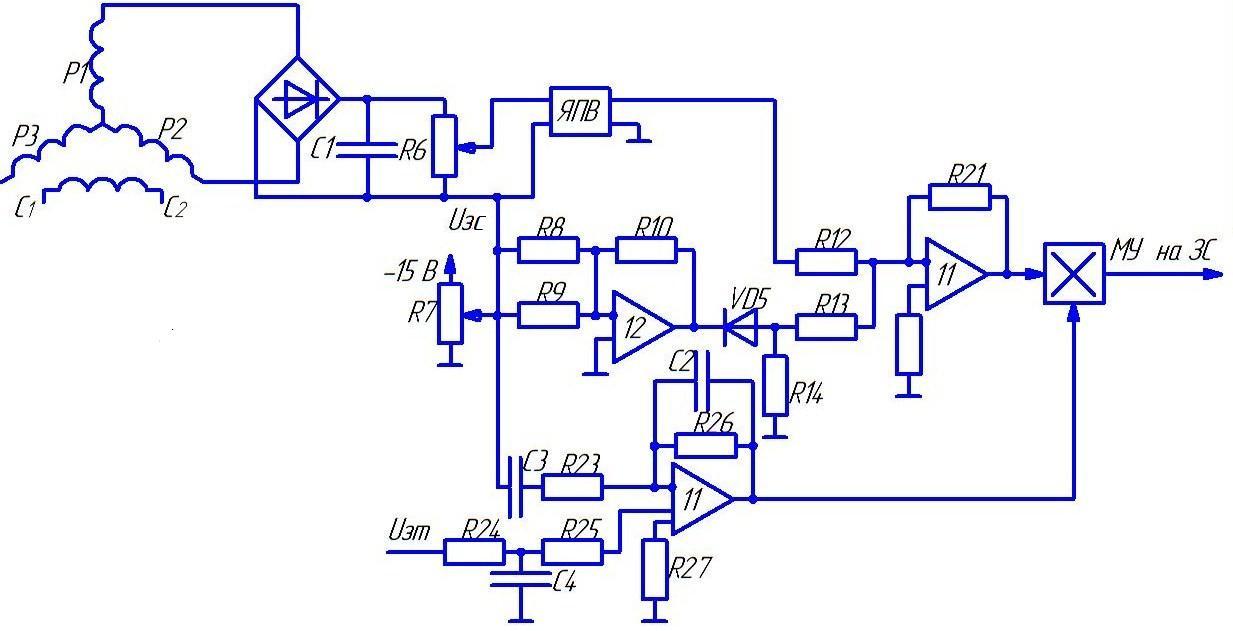
Схема реализована на DA11-13 сельсина и ячейки потенциальной развязки. Степень компаундирования задается поворотом ротора сельсина от исходного положения. При работе ЭП на ω<ωз max, где ωз max – максимальное значение заданной скорости, напряжение на выходе DA12>0, диод VD5 закрыт и заданный уровень компаундирования (напряжение с потенциометра R6) достигает входа множительного устройства МУ. При работе ЭП на ω<ωз max под действием результирующего напряжения задания Uз на выходе DA12 появляется отрицательное напряжение, снижающее выходное напряжение DA11 до нуля ,что означает отключение схемы компаундирования. Вторым сигналом на умножение является сигнал пропорциональный статорному току Uст. Этот сигнал получается как разность между сигналом пропорциональным току якоря Uзт и сигналом пропорциональным динамическому току, который получается путем дифференцирования сигнала задания скорости Uз с помощью R-C – цепочки С3, R23.