

§ 2.4 Кардинальные точки, главные и фокальные
плоскости и фокусные расстояния
Идеально оптической системой называется система, которая дает стигматическое изображение точек пространства предметов с помощью широких гомоцентрических лучей. В идеально оптической системе сохраняется гомоцентричность пучков и изображения геометрически подобны предмету. Рассмотрим идеально оптическую систему:

Задним фокусом оптической системы называется точка, являющаяся изображением бесконечно удаленной точки, лежащей на продолжении оптической оси F’. Это точка, в которой сходится после преобразования параллельные оси лучи В. Передними и задними главными плоскостями называются плоскости в пространстве предметов и изображений, для которых линейное увеличение = +1. Это плоскости, перпендикулярные главной оптической оси и проходящие через отрезки КН и К’Н’. Точка F называется передним фокусом оптической системы. Изображением данной точки является бесконечно удаленная точка в пространстве изображений. Расстояние НF, отсчитываемое от точки Н, называется передним фокусным расстоянием. Расстояние Н’F’, отсчитываемое от точки Н’, называется задним фокусным расстоянием. Плоскости Е и Е’ , перпендикулярны оптической оси и проходящие через точки фокусов F и F’, называются соответственно передней и задней фокальными плоскостями.
§ 2.5. Графическое построение изображений
Если известно положение главных точек системы и положение фокусов относительно их, то графическим построением можно найти изображение точки, отрезка и плоскости.

По положению главных точек строятся главные плоскости. Из точки А проводится луч АМ1 , составляющий произвольный угол с оптической осью. Через передний фокус F проводится линия FB, перпендикулярная оптической оси. Из точки В проводится луч ВМ2 , параллельный оптической оси, до пересечения с главной плоскостью в точке М2 . Луч М2 ‘В ‘ сопряженный с лучом ВМ2 должен пройти через задний фокус системы F’. Для нахождения луча, сопряженного с лучом ВМ1 , из точки М1’ проводится луч М1’А’ параллельный лучу М2’ В2’ . Точка пересечения луча М1 ‘А‘ с оптической осью А’ будет являться изображением точки А.
Построение изображений, не лежащих на оптической оси:
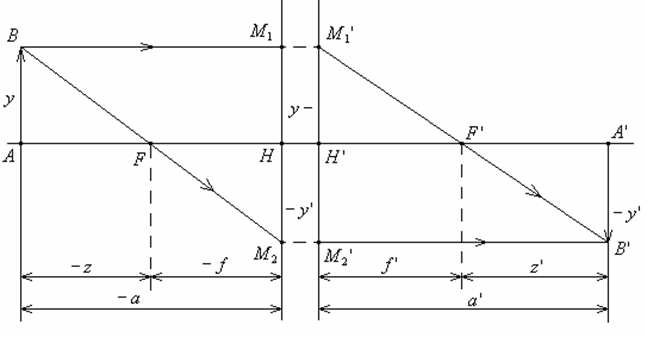 Рис.
2.7.
Рис.
2.7.
Из крайней точки предмета В, расположенной вне оптической оси, проводят два луча: ВМ1 параллельный оптической оси и ВМ2 проходящий через передний фокус системы. После преломления в системе луч М1’В’ должен пройти через задний фокус системы, а луч М2’В’ параллельно оптической оси. Точка пересечения этих двух лучей В’ будет являться изображением точки В.
Проведя через точку В’ прямую, перпендикулярную оптической оси, получим точку пересечения этой прямой с осью А’, которая является изображением точки А и следовательно отрезок А’В’ будет являться изображением отрезка АВ.
§ 2.6. Основные формулы для сопряжённых точек
Положение предмета и изображения аналитически определяется относительно фокусов системы и относительно главных точек. Определим положение точек А и А’ через отрезки FА и F’A’(отрезки от точек до фокусов отсчитываются от фокусов системы). Согласно правилам знаков FA= -z , a F’A’= -z. (рис. 2.7.)
Из прямоугольных треугольников ABF и FHM2 и треугольников M1FH и FAB можно записать:
 ,
(2.14)
,
(2.14)
 .
(2.15)
.
(2.15)
Приравнивая правые части выражений 2.14 и 2.15, получим:
 (2.16)
(2.16)
Выражение (2.16) носит название формулы Ньютона и устанавливает зависимость между расстояниями от переднего фокуса до предмета и от заднего фокуса до изображения.
Определим положение точек А и А’ через расстояния от главных точек системы Н и Н’. Из рис. 2.7 следует:
 ,
,
 (2.17)
(2.17)
откуда:
 ,
,
 .
(2.18)
.
(2.18)
Подставим 2.18 в 2.16:
 ,
(2.19)
,
(2.19)
 (2.20)
(2.20)
Поделим
обе части уравнения 2.20 на
 и получим:
и получим:
 .
(2.21)
.
(2.21)
Выражение 2.21 называется формулой Гаусса или формулой в отрезках.