

Уравнения кинематики движения цм.
Если
обозначить
![]() радиус-вектор, описывающий текущее
положение ЦМ ЛА относительно нормальной
земной СК, которое при сделанных
допущениях совпадает с началом координат
всех используемых подвижных СК, то
уравнение кинематики движения ЦМ будет
иметь вид
радиус-вектор, описывающий текущее
положение ЦМ ЛА относительно нормальной
земной СК, которое при сделанных
допущениях совпадает с началом координат
всех используемых подвижных СК, то
уравнение кинематики движения ЦМ будет
иметь вид
![]() , (3)
, (3)
или в
проекциях на оси нормальной земной СК
 .
Так как движение ЦМ принято описывать
относительно какой либо из СК, связанных
с Землей, то индексы g
обычно опускают, а вместо yg,
или y в нормальной земной
СК используют обозначение H
(высота).
.
Так как движение ЦМ принято описывать
относительно какой либо из СК, связанных
с Землей, то индексы g
обычно опускают, а вместо yg,
или y в нормальной земной
СК используют обозначение H
(высота).
При
определении земной скорости в траекторной
СК (т.е. из уравнений (1к)) уравнение (3)
примет вид  , (3к)
, (3к)
а при определении Vk в связанной СК (т.е. из уравнений (1св))
 . (3св)
. (3св)
Для задач наведения кинематика движения ЦМ часто рассматривается не в прямоугольной, а в сферической системе координат, т.е. в переменных r, , , где :
![]() - наклонная дальность, т.е. модуль
радиус-вектора;
- наклонная дальность, т.е. модуль
радиус-вектора;
![]() - угол места, т.е. угол между горизонтальной
плоскостью и радиус-вектором;
- угол места, т.е. угол между горизонтальной
плоскостью и радиус-вектором;
![]() - угол между осью xg
и проекцией радиус-вектора на горизонтальную
плоскость, называемый азимутом, если
ось xg
направлена на север.
- угол между осью xg
и проекцией радиус-вектора на горизонтальную
плоскость, называемый азимутом, если
ось xg
направлена на север.
Спроецировав вектор скорости на направление радиус-вектора, направление, перпендикулярное радиус-вектору в вертикальной плоскости, содержащей этот вектор, и третье направление, перпендикулярное первым двум, и подставив эти проекции в (3), можно получить уравнения кинематики движения ЦМ в сферической системе:
![]() ,
,
![]() , (3сф)
, (3сф)
![]() ,
,
Уравнения динамики движения вокруг цм.
Угловое
движение ЛА вокруг ЦМ соответствует
движению связанной СК относительно
нормальной. Переносной угловой скоростью
для уравнения (2) является вектор угловой
скорости вращения связанной СК
относительно нормальной
![]() ,
проекциями которого на оси связанной
системы являются угловые скорости крена
x
, рыскания y
и тангажа z
. Уравнения динамики движения вокруг
ЦМ получают, подставив в (2) эту угловую
скорость и момент инерции и раскрыв
векторное произведение.
,
проекциями которого на оси связанной
системы являются угловые скорости крена
x
, рыскания y
и тангажа z
. Уравнения динамики движения вокруг
ЦМ получают, подставив в (2) эту угловую
скорость и момент инерции и раскрыв
векторное произведение.
Если оси связанной СК совпадают с главными осями инерции, то
J = diag(Jx, Jy, Jz)
и при сделанных допущениях общее уравнение (2) приводится к виду
x= ((Jy Jz) yz + MRx)/ Jx
y= ((Jz – Jx) zx + MRy)/ Jy (2св)
z= ((Jx – Jy) xy + MRz)/ Jz
Если кроме осевых моментов инерции Jx, Jy, Jz необходимо учитывать центробежный момент Jxy, т.е.
J
=
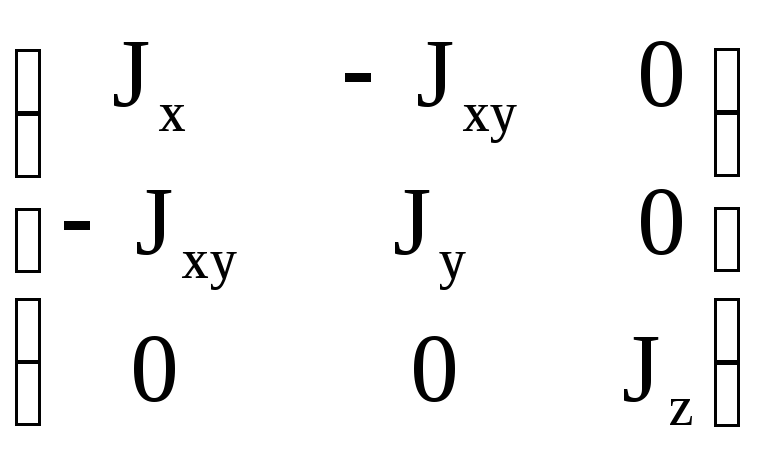 ,
то
,
то
x= (((JyJz)Jy+Jxy2)yz+(JzJxJy)Jxyxy+JyMRx+JxyMRy)/(JxJyJxy2),
y= (((JzJx)JxJxy2)zx+(Jx+JyJz)Jxyyz+JxyMRx+JxMRy)/(JxJyJxy2),
z= ((JxJy)xy+Jxy(x2y2)+MRz)/Jz.
Заметим, что в общем случае момент инерции твердого тела представляет собой симметричный тензор вида
J
= .
.
Здесь интегрирование проводится по объему тела v; плотность тела. Очевидно, что Jxy= Jyx, Jxz= Jzx, Jyz= Jzy.
Уравнение динамики углового движения в этом случае приобретет вид
Jxx Jxyy Jxzz (Jy Jz)yz + Jyz(z2y2) + x(Jxyz Jxzy) = MRx
Jyy Jyzz Jxyx (Jz Jx)zx + Jxz(x2z2) + y(Jyzx Jxyz) = MRe
Jzz Jxzx Jyzy (Jx Jy)xy + Jxy(y2x2) + z(Jxzy Jyzx) = MRz
Заметим, что эта система уравнений записана не в нормальной форме – для перевода к нормальной форме уравнение (2) должно быть домножено слева на матрицу J-1, что, очевидно, сделает запись системы уравнений в нормальной форме очень громоздкой.
Если ЛА приходится представлять как тело переменной массы, то уравнение (1) приобретет вид
![]() ,
,
и запись в скалярном виде окажется гораздо сложнее.
Результирующий момент при сделанных допущениях складывается из аэродинамических моментов и моментов, возникающих от тяги двигателя, причем последние возникают лишь в том случае, если линия действия тяги не проходит через ЦМ ЛА. Отметим, что и аэродинамические и моменты от тяги определяются в связанной СК, т.е. для подстановки в уравнения (2св) дополнительных пересчетов не требуется.
В
некоторых случаях приходится учитывать
также гироскопические моменты из-за
вращения турбин двигателей. Если ось
вращения турбин параллельна продольной
оси, а суммарный момент количества
движения всех вращающихся частей
двигателя равен Lдв,
то гироскопический момент в проекциях
на оси связанной СК имеет вид
 .
.