

Уравнения динамики движения цм.
Уравнения динамики поступательного движения для различных целей удобно составлять в проекциях на оси траекторной или связанной СК.
Уравнения динамики движения ЦМ в траекторной СК.
Скорость
движения ЦМ в траекторной системе -
![]() .
Переносная угловая скорость
.
Переносная угловая скорость
![]() в рассматриваемом случае - это скорость
вращения траекторной СК относительно
нормальной. Обозначим проекции этой
угловой скорости на оси траекторной
системы
в рассматриваемом случае - это скорость
вращения траекторной СК относительно
нормальной. Обозначим проекции этой
угловой скорости на оси траекторной
системы
![]() ,
т.е.
,
т.е.
![]() .
Угловое положение траекторной системы
относительно нормальной описывается
углами пути и
наклона траектории ,
а изменение этого положения (вращение)
- соответствующими скоростями
.
Угловое положение траекторной системы
относительно нормальной описывается
углами пути и
наклона траектории ,
а изменение этого положения (вращение)
- соответствующими скоростями
![]() и
и
![]() ,
причем вектор
,
причем вектор
![]() направлен вдоль вертикальной оси yg,
а вектор
направлен вдоль вертикальной оси yg,
а вектор
![]() - вдоль оси zk
траекторной системы. Спроецировав эти
вектора на оси траекторной системы,
можно получить нужные проекции переносной
скорости
- вдоль оси zk
траекторной системы. Спроецировав эти
вектора на оси траекторной системы,
можно получить нужные проекции переносной
скорости
![]() ,
,
![]() ,
,
![]() .
В результате уравнение (1) получит вид
.
В результате уравнение (1) получит вид
 ,
или, после выполнения векторного
произведения
,
или, после выполнения векторного
произведения  ,
или в более компактном виде
,
или в более компактном виде  , (1к)
, (1к)
где
![]() - вектор результирующей всех внешних
сил, представленный своими проекциями
на оси траекторной системы.
- вектор результирующей всех внешних
сил, представленный своими проекциями
на оси траекторной системы.
Векторное уравнение (1к) соответствует системе из трех скалярных уравнений, которые после приведения к нормальной форме при приобретут вид:
![]() ,
, ![]() ,
, ![]() .
.
Уравнения динамики движения ЦМ в связанной СК.
Переносной
угловой скоростью в этом случае является
вектор угловой скорости вращения
связанной СК относительно нормальной
![]() ,
проекциями которого на оси связанной
системы являются угловые скорости крена
x
, рыскания y
и тангажа z
. Следует обратить внимание на то,
что эти угловые скорости являются теми
величинами, которые непосредственно
могут быть измерены на борту ЛА.
,
проекциями которого на оси связанной
системы являются угловые скорости крена
x
, рыскания y
и тангажа z
. Следует обратить внимание на то,
что эти угловые скорости являются теми
величинами, которые непосредственно
могут быть измерены на борту ЛА.
Обозначив
проекции вектора земной скорости на
оси связанной СК Vkx, Vky и Vkz
соответственно, т.е. записав![]()
![]() =
(Vkx,Vky,Vkz)T и
подставив вектора
=
(Vkx,Vky,Vkz)T и
подставив вектора
![]() и
и
![]() в уравнение (1), после преобразований,
аналогичных произведенным выше, можно
получить следующее уравнение:
в уравнение (1), после преобразований,
аналогичных произведенным выше, можно
получить следующее уравнение:
 , (1св)
, (1св)
где
![]() - вектор результирующей всех внешних
сил, представленный своими проекциями
на оси связанной системы.
- вектор результирующей всех внешних
сил, представленный своими проекциями
на оси связанной системы.
С учетом
сделанных допущений действующие на ЛА
силы - это вес ЛА
![]() ,
тяга
,
тяга
![]() ,
и результирующая аэродинамическая сила
,
и результирующая аэродинамическая сила
![]() ,
т.е.
,
т.е.
![]() .
Вес очевидным образом выражается
проекциями на оси нормальной СК
.
Вес очевидным образом выражается
проекциями на оси нормальной СК
![]() ,
аэродинамические силы обычно определяются
в скоростной
,
аэродинамические силы обычно определяются
в скоростной
![]() ,
реже - в связанной СК
,
реже - в связанной СК
![]() ,
тяга - в связанной СК, причем конкретные
выражения для проекций тяги могут быть
разными в зависимости от геометрии ее
действия. Например, если тяга величиной
P приложена вдоль продольной
оси х, то
,
тяга - в связанной СК, причем конкретные
выражения для проекций тяги могут быть
разными в зависимости от геометрии ее
действия. Например, если тяга величиной
P приложена вдоль продольной
оси х, то
![]() ,
если - в плоскости симметрии под углом
т, то
,
если - в плоскости симметрии под углом
т, то
![]() .
.
Для получения нужных проекций на оси траекторной или связанной систем необходимо воспользоваться соответствующими матрицами перехода
![]() ,
,
![]() .
.
Следует
обратить внимание на то, что динамика
поступательного движения существенно
зависит от параметров углового движения.
Во первых, в сами уравнения (1св) входят
угловые скорости, во вторых, от параметров
углового движения зависят аэродинамические
силы и, в ряде случаев - тяга, а в третьих,
углы входят в матрицы перехода
![]() ,
,
![]() .
.
Для оценки маневренных возможностей ЛА удобно записать уравнения динамики движения ЦМ через перегрузки.
Вектор
перегрузки
![]() определяется соотношением
определяется соотношением
![]() ,
т.е.
,
т.е.
![]() .
Аналогично силам перегрузку можно
записать в проекциях на оси связанной
и траекторной СК и, подставив в выражения
для соответствующих проекций
равнодействующей силы
.
Аналогично силам перегрузку можно
записать в проекциях на оси связанной
и траекторной СК и, подставив в выражения
для соответствующих проекций
равнодействующей силы
![]() и
и
![]() ,
получить уравнения динамики движения
ЦМ через перегрузки. Следует обратить
внимание на то, что проекции перегрузок
в связанной СК nx,
ny, nz
(продольная, нормальная и поперечная
перегрузки) являются теми величинами,
которые непосредственно могут быть
измерены на борту ЛА.
,
получить уравнения динамики движения
ЦМ через перегрузки. Следует обратить
внимание на то, что проекции перегрузок
в связанной СК nx,
ny, nz
(продольная, нормальная и поперечная
перегрузки) являются теми величинами,
которые непосредственно могут быть
измерены на борту ЛА.
В связанной СК
 где
eyx,
eyy,
eyz -
элементы второго столбца матрицы
где
eyx,
eyy,
eyz -
элементы второго столбца матрицы
![]() ,
и уравнение (1св) примет вид
,
и уравнение (1св) примет вид
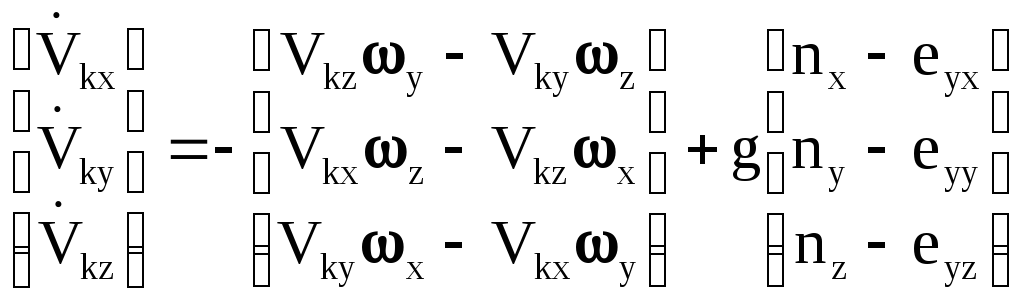 . (1свn)
. (1свn)
В траекторной СК
 ,
,
и уравнение (1к)
примет вид
 , (1кn)
, (1кn)
или в нормальной скалярной форме
![]() ,
, ![]() ,
, ![]() .
.