

Лекция №6 вероятность переполнения буфера
Ро = Рхх ρ = λТо – коэффициент загрузки
По каждому каналу буфер имеет память объемом N.
Достаточно небольшого разброса коэффициента загрузки и вероятность опустошения меняется очень здорово.
ρ = λ/Fo
Вероятность потери существующего отсчета (вероятность переполнения буфера)

Берем m тактов: mTo – интервал времени.
Рпотр
=
![]() lim
mώ
lim
mώ
![]()
Рпотр
= 1 -
![]()
ДОПОЛНИТЕЛЬНЫЙ ВОПРОС:
Вывод этого выражения 1-ρо – вероятность того, что в буфере что-то есть.
Кривые вероятности потери:
Потеря одиночной выборки не приводит к фатальным последствиям при передаче аналоговой информации(температура и др) Предпочтительнее коэффициент загрузки 0.95, взять N=100, можно получить низкие вероятности потери, но увеличиться вероятность холостого хода(но это ничего страшного)

Рассматриваем интервал (KTo, (K+1)To); KTo=<t<(К+1)To
Pλ – выход в радио линию
Наши отчеты имеют случайную задержку, которая состоит из задержек на целое число тактов, и на некоторую случайную задержку:
τз = Кто + τ , где τ – случайная величина(задержка)
к – случайная величина
кТо определяется состоянием БЗУ (величиной очереди), вероятностью Рj
W(τз)
=
![]() =
=
![]()
![]()
![]()
P1(t) = P2e-λt + λt P1 + λt P0e-λt
Pj(t)
=
![]() +1-j
e-λt
+1-j
e-λt + Po-λt
+ Po-λt
0
![]() j
< N
j
< N
Вероятность того, что в БЗУ будет 1 выборка, равна вероятности трех несовместимых событий. В БЗУ было в интервале предшествующий тактовому интервалу 2 выборки одна вышла, одна осталась; в БЗУ был 1 существенный отсчет один вывели, один поступили, в БЗУ не было ни одного отсчета, один поступил после момента кТо
Можно получить среднее значение(математическое ожидание) и дисперсию задержки:
М(τз)
= То/2 +
![]() -
-![]() -M2(τз)
-M2(τз)
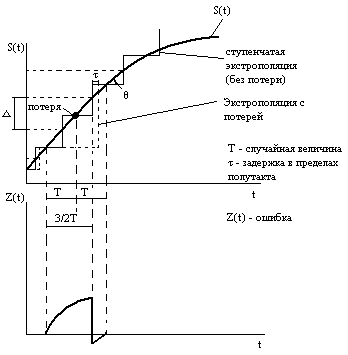
Задержку в целое число тактов можно учесть, а задержку внутри такта принудительно учесть нельзя, так как она случайная величина.
Ошибки восстановлены, обусловленные процедурой электрополяции задержкой и потерей выборки.
В приемной части системы перед нами стоит следующая задача: есть параметр S(t) который представлен существенными отсчетами.
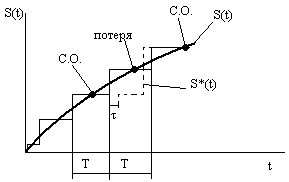
S(t) – истинное значение
S*(t) – оценка
Лекция №7
Полагаем, что процесс у нас гаусовский с дисперсией δ2с. Процесс дифференцируемый и в пределах апертуры можно аппроксимировать его прямой с наклоном θ, где θ – производная нашего случайного(гаусовского) измеряемого процесса.
Таким образом можем записать выражение для ошибке:
Z2(t)=![]() (
(![]()
![]() );
);
ξ2= =D2/12
δ2с(1+12Рпот
+ 6πλ δτ2)
(1) относительная ошибка
=D2/12
δ2с(1+12Рпот
+ 6πλ δτ2)
(1) относительная ошибка
Из теорем случайных процессов:
θ2=
δ2сω12;
λ=![]() ;
;
Кроме этого, можно также вычислить ошибку, обусловленную задержкой и экстраполяцией. Из теории известно, что ошибка экстраполяции и ошибки равны:
![]() ошибка
экстраполяции
ошибка
экстраполяции
![]() -
ошибка, обусловленная потерей
-
ошибка, обусловленная потерей
И учитывается такой факт, что ошибка обусловленная потерей существует относительное время равное 2Рпот. И тогда, у нас получается:
![]() Рпот
– ошибка чисто обусловленная потерей
Рпот
– ошибка чисто обусловленная потерей
В выражении (1)
1–е слагаемое - ошибка, обусловленная экстраполяцией
2-е слагаемое - ошибка обусловленная потерей
3-е слагаемое - ошибка, обусловленная задержкой
Ошибка задержки определяется дисперсией задержки и интенсивностью существенных отсчетов( чем больше интенсивность, тем больше задержек)
То, что мы рассматриваем, нужно относить к сжатию с потерями(используется при аналоговой информации)
Принципиально под сжатием без потерь понимают оптимальные передачи информации или передачу информации с предсказанием.
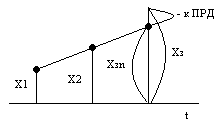
![]() Хз=Хз-Хзn
– передается разница – это оптимальная
передача (увеличивается скорость
передачи информации, уменьшается кодовая
последовательность)
Хз=Хз-Хзn
– передается разница – это оптимальная
передача (увеличивается скорость
передачи информации, уменьшается кодовая
последовательность)
При передаче аналоговой информации можно сначала использовать сжатие с потерей, а затем сжатие без потерь(это более эффективно)
Билет № 14. Системы синхронизации цифровых РТС передающая часть
Система синхронизации цифровой РТС Передающая часть
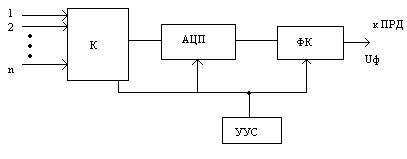
С.С. – сигнал синхронизации слов

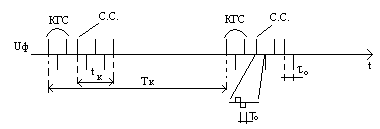
Это формирует УСС – устройство управление синхронизацией.
Рассматриваем равномерный циклический опрос система последовательная
Приемная часть
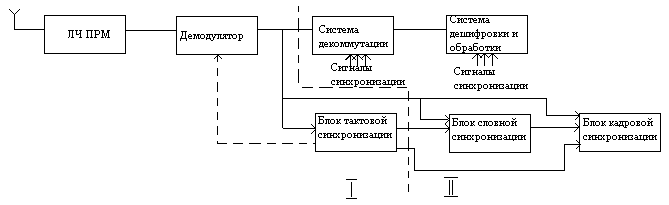
I – аппаратная часть, II – программная реализация
Оптимальный приемник и хороший демодулятор нуждается в тактовой синхронизации.
Т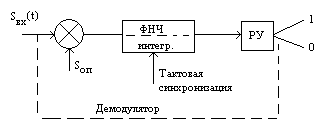 актовая
синхронизация - это определение границ
сигнала прием, оптимальный, когда
фазовый детектор и тактовая синхронизация
имеют перекрестные связи.
актовая
синхронизация - это определение границ
сигнала прием, оптимальный, когда
фазовый детектор и тактовая синхронизация
имеют перекрестные связи.
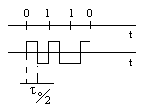
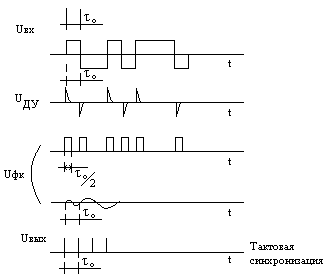 На входе блока
тактовой синхронизации мы имеем
последовательность нулей и единиц, из
которых надо выделить сигнал тактовой
синхронизации.
На входе блока
тактовой синхронизации мы имеем
последовательность нулей и единиц, из
которых надо выделить сигнал тактовой
синхронизации.
Блок тактовой синхронизации.
(-) Но возникает принципиальный вопрос: по тем или иным причинам тактовая частота может сдвигаться, из-за этого затрудняется фильтрация, нужен узкополосный следящий фильтр. Этот сдвиг не может учитываться при формировании τ0/2. Принципиально получится ошибка при формировании сигнала тактовой синхронизации.
Расщеплять фазу надо в передатчике.
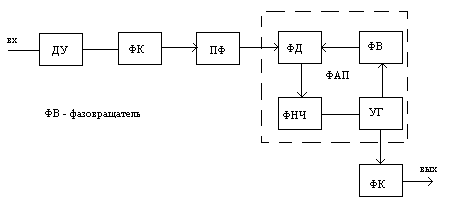
В этом случае такой ошибки нет.