

Билет № 1. Общая структура РТС приемная часть.
Билет № 2. Многоступенчатые системы коммутации.
Билет № 3. Общая структура РТС передающая часть
Билет № 4. Классификация РТС
Билет № 5. Распределение частот опроса при помощи древовидного графа
Билет № 6. Информационная гибкость (Гибкая информативность)
Билет № 7. Уменьшение избыточности измерительной информации
Билет № 8. Адаптивные коммутаторы
Билет № 9. Структурная схема РТС с опертурным уменьшением избыточности
Билет № 10. Интенсивность существующих отчетов
Билет № 11. Системы синхронизации
Билет № 12. Характеристики БЗУ
Билет № 13. Характеристики БЗУ. Вероятность переполнения буфера ЗУ
Билет № 14. Системы синхронизации цифровых РТС передающая часть
Билет № 15. Система сбора информации. Коммутаторы, мультиплексоры (общие характеристики)
+Многоступенчатые системы коммутации
Билет № 16. Системы синхронизации цифровых РТС приемная часть
Билет № 17. Синхронизация РТС с ВИМ передающая часть
Билет № 18. Синхронизация РТС с ВИМ приемная часть
Билет № 19. Блок синхронизации слов
Билет № 20. Характеристики БЗУ. Вероятность опустошения буфера
Билет № 21. Оптимальные методы передачи измерительной, телеметрической информации
Билет № 22. Общая структура РТС передающая часть
Билет № 23. Блок кадровой синхронизации
Билет № 1. Общая структура РТС приемная часть.ЛЕКЦИЯ №2
Приемная часть
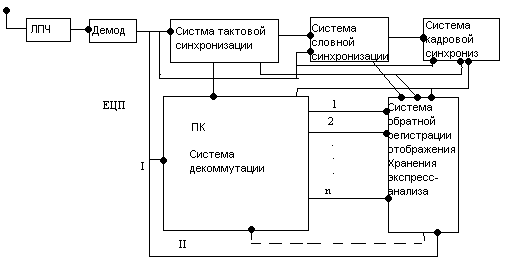
ПК - приемный коммутатор
ЛПЧ – линейная часть приемника
Основная задача - выделение(демодуляция) информационных двоичных символов и выделение сигналов синхронизации. И на этой основе решаются основные задачи, определения от какого источника информации в соответствующий момент времени поступает информация.
ЕЦП – единый цифровой поток.
К.С. – кадровая синхронизация, С.С. – словная синхронизация
Т.С. – тактовая синхронизация.
Принципиально всю систему приема можно разделить на 2 части.
1-я часть чаще всего выполняется в виде специальной аппаратуры.
2-я часть выполняется в виде ПО, которое работает на универсальных вычислительных средствах.
Реализация системной групповой синхронизации является программной, а демонстрация и регистрация реализуются аппаратно.
Решения всех задач, начиная с задачи групповой синхронизации, декоммутации, обработки отображения в режиме многократно воспроизведения.
Помехоустойчивость демодуляции намного ниже помехоустойчивости систем синхронизации, т.к. время фильтрации демодуляции τ0 ограничено, а время фильтрации сигналов синхронизации может быть довольно большим.
При многократном воспроизведении улучшаем условия(возможности) фильтрации. В реальном времени есть много ограничений применяется в системах дальней космической связи.
Билет № 2. Многоступенчатые системы коммутации.
 Частоты
опроса локальных и опорных коммутаторов
должны выдерживаться в определенных
соотношениях.
Частоты
опроса локальных и опорных коммутаторов
должны выдерживаться в определенных
соотношениях.
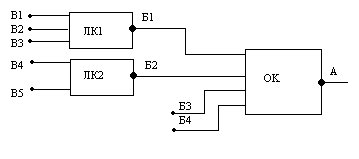
Задача распределения частот опроса основного коммутатора(скорость передачи информации) между разнообразными источниками информации является существенной.
Лекция №8
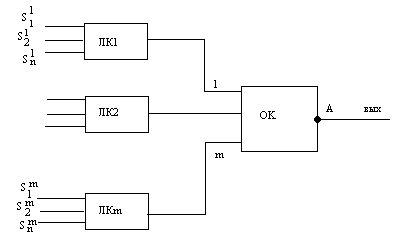
Последовательный опрос в многоступенчатой системе.
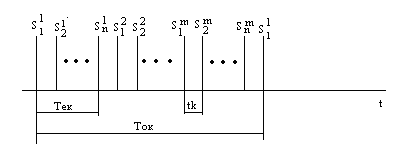
Ток = m Тек; tk= Ток/m n
Tkok = Тек – канальный интервал основного коммутатора
Тек – период локального коммутатора
Fопр = 1/Топр; Топр=Ток – период опроса 1-го датчика
Чередующийся опрос в многоступенчатой системе
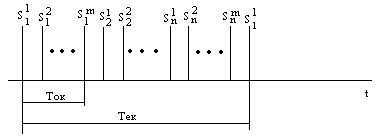
За канальный интервал локального коммутатора осуществляется цикл опорного коммутатора
Ток = Тек/n ; tek = Ток ; Топр = Тек;
В чистом виде последовательный и чередующийся опрос встречаются очень редко, в основном они встречаются в сочетании.
Схема такой многоступенчатой коммутации реализуется при помощи адресных программируемых коммутаторов с использованием адресов
М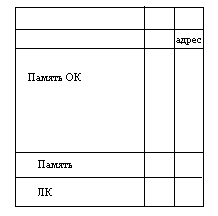 ногоступенчатый
опрос с локальными коммутаторами
позволяет осуществлять распределение
информативности системы сбора и скорости
передачи информации
ногоступенчатый
опрос с локальными коммутаторами
позволяет осуществлять распределение
информативности системы сбора и скорости
передачи информации
Fa = Иок = Rт[отсч/сек] – частота опроса точки А
Иок – интенсивность основного коммутатора
Rт – техническая скорость передачи
Fa = 1/ tk
Это частота распределения между всеми источниками информации. Такое распределение (простое) в реальных случаях для больших информационных систем мало пригодна. И частот опроса требуется много (разнообразных) с другой стороны технические характеристики объекта диктуют архитектуру системы сбора, которая совершенно необязательно будет такой симметричной (она будет произвольной) Поэтому возникает достаточно сложная задача распределения частей опроса, которое наверное принудительно не имеет общего решения, а распределение частот опроса в многоступенчатой системе сбора информации. Однако частные решения есть.
Билет № 3. Общая структура РТС передающая часть
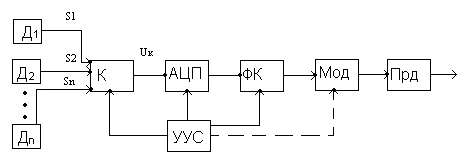
Д - датчики
К – коммутатор
УУС– устройство управления синхронизаций
ФК - формирователь кадра
Мод - модулятор
Прд – передатчик
Эта система цифровая. Эта простая схема позволяет рассматривать сложные проблемы многоканальных систем.
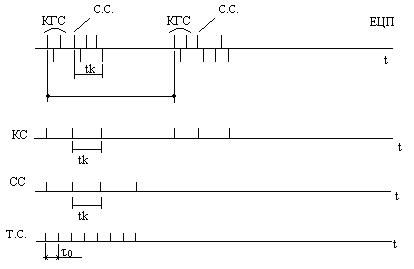
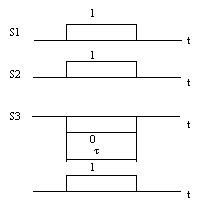
Эпюры:
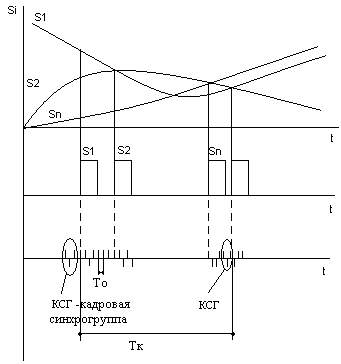
КСГ – кадровая синхрогруппа(начало кадра)
УУС задаёт tk (начальный интервал, в течение этого времени мы опрашиваем каждый канал, шаг, тактовый канал τ0)
tk – канальный интервал
Тк – длительность кадра
С.С. – сигнал синхронизации слова(начало слова)
Шаг дискретизации равен Тк, в течение времени tk опрашивается каждый канал
![]() -
длительность элементарного двоичного
символа
-
длительность элементарного двоичного
символа
изображена классическая, самая простая РТС
Основные параметры задаются УСС:
![]() -
частота опроса
-
частота опроса
![]() -
частота переключения каналов
-
частота переключения каналов
![]() -
тактовая частота
-
тактовая частота
![]() -
техническая скорость передачи информации
-
техническая скорость передачи информации
В этой структуре представлены все основные уровни синхронизации:
Кадровая
Словная
Тактовая
У нас система с временным уплотнением каналов(каждый источник передает информацию в определенное время) => один канал передачи информации, но система все равно многоканальная, т.к. много источников и потребителей.
Т.к. система многоканальная, должен быть ансамбль сигналов (каждый сигнал существует в свое время).
Билет № 4. Классификация РТС
1)По назначению:
Военные
Космические
Исследовательские и т.д.
2)По виду передачи информации:
Аналоговые
Цифровые
Совмещенные(по отдельным каналам не происходит цифро-аналогового преобразования, а передаются непосредственно значения параметров. Это применяется, когда много сигналов и они разнообразны по частотным характеристикам.
3)По виду телеметрического сигнала
Для цифровых систем это кодово-импульсная модуляция
Для аналоговых систем это амплитудно – импульсная модуляция, которую можно преобразовать в широко – импульсную.
4)По способу уплотнения и разделения каналов(речь идет о передающей части системы, если говорят об уплотнении и о приемной, если о разделении):
Уплотнение – это способ передачи от многих источников по одному каналу.
Уплотнение – это способ формирования ансамбля сигналов. Один из основных принципов формирования ансамбля сигнала является то, что свертка сигнала должна стремиться к нулю:
![]()
![]() сигналы
противоположные
сигналы
противоположные
Временное уплотнение и разделение каналов(сигналы ортогональны)
Частотное разделение каналов
Кодовая разделение каналов
Комбинированное уплотнение
5)Способы уплотнения можно разделить на линейные и нелинейные:
Линейные – групповой сигнал, является линейной комбинацией
Существуют способы нелинейного уплотнения с линейным и нелинейным разделением.
6)По виду модуляции несущей:
ЧМ
ФМ
Многопозиционные виды модуляции
7) По точности:
Высокоточные (до 1%)
Средней точности (до 3%)
Слаботочные
8) По информативности:
Информативность определяется как суммарная частота опроса по каналу (число измерений в секунду)
Uk
=
![]()
Uk=nFonp[Гц]
Малой информации
Средней
Высоко информационные
Билет № 5. Распределение частот опроса при помощи древовидного графа
Распределение частот опроса при помощи древовидного графа.
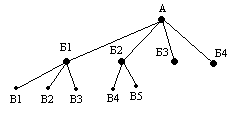
Определение: Степенью вершины будем называть число лучей, исходящих из предыдущей вершины. Степень вершин Б1 – Б4 равна 4, т.к. из А исходит 4 луча. Соответственно вершины В1 – В3 имеют степень 3, т.к. из Б1 выходит 3 луча, В4 –В5 имеют степень 2. Частота опроса вершины равна частоте опроса предыдущей вершины деленная на степень данной вершины:
![]()
Нельзя принципиально найти общее решение, т.к. нельзя принципиально поставить общую задачу.
Билет № 6. Информационная гибкость (Гибкая информативность)
Из теоремы котельникова
Fg=2Fmax - частота опроса (если выбрать частоту опроса таким образом, то сможем восстановить сигнал со сколь угодно малой ошибкой) частота дискретизации.(Fmax - максимальная частота в измеряемом процессе)
ДЕТЕРМИНИРОВАННЫЕ ПРОЦЕССЫ – СИНУСОИДЫ(ОНИ ИМЕЮТ НЕОГРАНИЧЕННЫЙ СПЕКТР)
Детерминированные процессы(например синусоида) при бесконечной реализации имеют ограниченный спектр. Спектр конечной реализации измеряемого процесса является неограниченным.
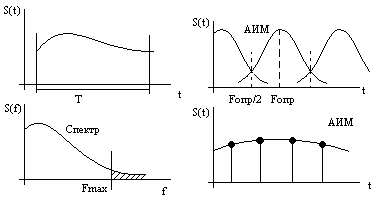
Fg = Fопр – частота дискретизации(опроса)
Таким образом, мы всегда будем иметь ошибку:
Eg= - относительная ошибка восстановления
- относительная ошибка восстановления
Fопр≈(5÷10)Fmax – на практике зависит от требуемой точности восстановления
На практике должен быть набор частот опроса, тогда система обладает гибкой информативностью
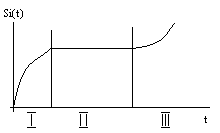
1 – выход на режим, 2 – работа в штатном режиме, 3 – аномальное поведение(сбои)
8) Адаптивность
3 режим в отличии от 1 и 2 не прогнозируется
F01>F02, F03>F02
Система сама должна поднимать частоту опроса, т.е. обладать свойством адаптивности.
Частота опроса д.б. пропорционально связанной с максимальной частотой
fопр~Fmax
Частота опроса должна быть пропорциональна среднеквадратической ширине спектра измеряемого сообщения. ω1 , (Fo~ ω1)
Есть возможность на основе экспериментальных данных осуществить спектральный анализ и определить нужные частоты опроса.
В адаптивной системе, как правило предусматривается изменение скорости передачи информации в зависимости от скорости передаваемой информации в зависимости от состояния канала связи и изменения отношения сигнал/шум на входе приемника.
Уменьшение избыточности измерительной информации(адаптивная телеметрия)
Оппертурные методы уменьшения избыточности.
Уменьшение избыточности часто определяется термином сжатие данных. Если частота опроса источников информации выбрана правильно(оптимально, т.е. обеспечивает заданную достоверность или точность восстановления) то никакого сжатия(уменьшения избыточности) не требуется, она не имеет смысла. Но скорость передачи информации будет падать.
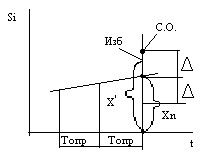
На основе предыдущих отсчетов можно по тому или и ному алгоритму предсказать значение следующего отсчета.
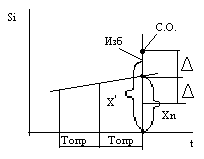
Xn – предсказанное значение методом линейной экстраполяции
X` - избыточный отсчет
С.О. – существенный отсчет(т.к. вышел за опертуру)
Если внутри апертуры, то избыточный отсчет , его можно выкинуть.
Это был полиномиальный предсказатель
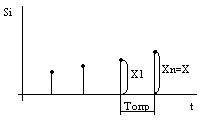
Другой путь уменьшения избыточности основан на статистическом корреляционном анализе.
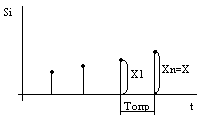
Х=X1R(Tопр) – предсказанное значение является условным средним
R(τ) – коэффициент корреляции, вычисленный по предыдущему отсчету.
Если для определения коэффициента корреляции используется много предыдущих отсчетов, то ошибка Eg начинает возрастать
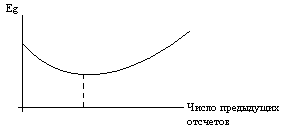
Неоправданно использование для предсказания номиналов очень высокого характера, ошибка тоже увеличивается.
Сжатие данных без потерь – сжатие данных без уменьшения избыточности.
В ыигрыш
за счет того, что уменьшается количество
передаваемых бит, уменьшается длина
сообщения, увеличивается быстродействие,
сжатие без потерь.
ыигрыш
за счет того, что уменьшается количество
передаваемых бит, уменьшается длина
сообщения, увеличивается быстродействие,
сжатие без потерь.
Сжатие без потерь – оптимальная передача.
Билет № 7. Уменьшение избыточности измерительной информации
Оппертурные методы уменьшения избыточности.
Уменьшение избыточности часто определяется термином сжатие данных. Если частота опроса источников информации выбрана правильно(оптимально, т.е. обеспечивает заданную достоверность или точность восстановления) то никакого сжатия(уменьшения избыточности) не требуется, она не имеет смысла. Но скорость передачи информации будет падать.
На основе предыдущих отсчетов можно по тому или и ному алгоритму предсказать значение следующего отсчета.
Xn – предсказанное значение методом линейной экстраполяции
X` - избыточный отсчет
С.О. – существенный отсчет(т.к. вышел за опертуру)
Если внутри апертуры, то избыточный отсчет , его можно выкинуть.
Это был полиномиальный предсказатель
Другой путь уменьшения избыточности основан на статистическом корреляционном анализе.
Х=X1R(Tопр) – предсказанное значение является условным средним
R(τ) – коэффициент корреляции, вычисленный по предыдущему отсчету.
Если для определения коэффициента корреляции используется много предыдущих отсчетов, то ошибка Eg начинает возрастать

Неоправданно использование для предсказания номиналов очень высокого характера, ошибка тоже увеличивается.