

647_Pinegina_T.JU._Praktikum_po_kursu_fiziki_
.pdfПрямолинейное равноускоренное движение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Ускорение a const , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
скорость υ υ0 a t , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
путь s 0 t a t2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.20) |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
координата x x0 0 t at2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прямолинейное равнозамедленное движение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Ускорение a const , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
скорость υ υ0 |
a t , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
путь s 0 t |
a t 2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.21) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
координата x x0 |
0 t |
a t 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если знак минус вынесен перед ускорением (движение замедленное), то значе- |
||||||||||||||||||||||
ние ускорения берется по модулю. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
Cx |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
тело |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 y |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bx |
|
|
||||
|
|
|
|
|
g |
|
hmax |
|
|
|
|
|
|
|
X |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
O |
0x |
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
By |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
B |
|
||
Рисунок П.1.1. – Движение тела, брошенного под углом к горизонту |
||||||||||||||||||||||
Баллистическое движение. |
|
|
|
|
Ответы: |
|
|
|
|
|
|
|
|
|
|
|
||||||
Тело, брошено под углом |
к гори- |
1) |
t1 |
|
0 |
sin |
; |
|
|
|
|
|
|
|||||||||
зонту и движется в поле тяжести Зем- |
|
|
|
g |
|
|
|
|
|
|
|
|||||||||||
ли. Начальная скорость тела равна |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
2 |
sin2 |
|
|
|
|||||||||||||
(рисунок 1.1). Сопротивлением возду- |
2) |
hmax |
|
|
|
0 |
|
|
|
|
|
; |
|
|
||||||||
|
|
|
2g |
|
|
|
|
|
||||||||||||||
ха пренебречь. Определить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
0 |
sin |
|
|
|
|
|||||||||
1) время подъема t ; |
|
|
|
|
|
3) |
t2 t1 |
; |
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2) максимальную |
высоту |
|
подъема |
|
|
g |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
hmax ; |
|
|
|
|
|
|
|
4) tполн |
t2 t1 |
|
2 0 |
sin |
; |
|||||||||
3) время падения t2 ; |
|
|
|
|
|
|
|
|
|
g |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4) общее время движения t |
пол н |
; |
|
5) |
S |
2 |
sin( 2 ) |
; |
|
|
|
|
||||||||||
5) дальность полета S; |
|
|
|
|
0 |
|
|
g |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
6) скорость в конечной точке траекто- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
61 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

рии B ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
0 |
|
|
|
|
||||||||
7) угол t между вектором скорости и |
|
6) B By |
Bx |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
горизонтом в любой момент времени |
|
|
|
|
|
|
|
y |
|
|
0 y |
gt |
|
|
|
0 |
sin gt |
|||||||||
t ; |
|
7) |
tg t |
|
|
|
||||||||||||||||||||
|
x |
|
|
0x |
|
|
|
|
|
|
|
0 cos |
||||||||||||||
8) уравнение движения y f ( x ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
y Ax Bx2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
8) |
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
A tg , B |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 0 |
2 |
|
cos |
2 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Равномерное вращение |
|
0; const ; t |
|
(1.22) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Равноускоренное вращение const; |
0 t; |
0 t |
t 2 |
|
|
|
(1.23) |
|||||||||||||||||||
|
|
2 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Равнозамедленное вращение const; |
|
0 |
|
|
|
t; |
|
0 |
t |
|
|
|
t 2 |
|
|
(1.23) |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Динамика
Основные соотношения динамики поступательного движения
17) Силы в динамике.
Сила гравитационного притяжения, действующая между двумя материальными точками с массами m1 и m2 , расположенными на расстоянии r , определяет-
ся законом Всемирного тяготения (G = 6,67∙10-11 |
м3 |
||||
|
(СИ) – универсальная |
||||
|
|||||
|
|
|
|
кг с |
|
постоянная): |
|
|
|
|
|
F |
|
G m1 m2 |
, |
(1.24) |
|
|
|||||
грав. |
|
r2 |
|
|
|
|
|
|
|
|
|
Гравитационные силы – силы притяжения. |
|
|
|
||
Однородная сила тяжести (m – масса тела, g – ускорение свободного падения: |
||
|
|
(1.25) |
F |
mg , |
|
Упругая сила – сила, зависящая от смещения точки из положения равновесия и направленная к положению равновесия:
Fупр k l , |
(1.26) |
где k – коэффициент жесткости пружины (стержня), ∆l – величина упругой деформации. Знак минус означает, что сила упругости и смещение точки от равновесного (недеформированного) состояния противоположны по направлениям.
Сила сопротивления действует на тело при его поступательном движении в газе или жидкости. Направление силы сопротивления всегда противоположно направлению движения тела. Обычно в задачах указывается зависимость силы сопротивления от различных параметров.
Силы реакции связей. Связь обеспечивают тела, препятствующие передвижению данного тела. Тело действует на связь, связь действует на тело (3–й закон
62
Ньютона) с силой, называемой реакцией связи. Реакция идеальной связи направлена по общей нормали к поверхности соприкасающихся тел в точке их касания.
Сила трения возникает при непосредственном соприкосновении тел и всегда направлена вдоль поверхности соприкасающихся тел. Различают три вида сил трения.
Сила трения покоя действует на неподвижное тело и направлена в сторону, противоположную предполагаемому движению тела, если бы не было трения ( п – коэффициент трения покоя, N – сила реакции опоры):
Fтр.покоя п N |
(1.27) |
Сила трения скольжения возникает при скольжении одного тела по поверхности другого (μ – коэффициент трения, зависящий от соприкасающихся поверхностей, N – сила реакции опоры):
Fтр N , |
(1.28) |
Сила трения скольжения направлена в сторону, противоположную направлению движения данного тела относительно другого тела.
Сила трения качения Fmax кач Nr , где кач – коэффициент трения качения,
r – радиус катящегося тела, N – сила реакции опоры в точке соприкосновения тела и опоры.
Выталкивающая сила Архимеда равна весу вытесненной жидкости или газа, в которых находится данное тело ( ср – плотность среды, V – объем тела или его
части, погруженной в жидкость, g – ускорение свободного падения): |
|
FАрх g ср V . |
(1.29) |
Законы Ньютона
18) Первый закон Ньютона.
Всякая материальная точка (или тело) сохраняет состояние покоя или равно-
мерного прямолинейного движения, пока на нее не действуют силы или дей- |
||||||
ствие сил скомпенсировано. |
|
|
|
|
|
|
19) Второй закон Ньютона. |
|
|
|
|
|
|
Скорость изменения импульса |
материальной точки равна действующей |
|||||
р |
||||||
на нее силе: |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
dр |
|
||
|
|
|
|
F . |
(1.30) |
|
|
|
|
dt |
|||
|
|
|
|
|
||
Если на материальную точку одновременно действуют несколько сил, то изменение её импульса происходит под действием равнодействующей силы
(принцип суперпозиции или принцип независимости действия сил на тело) |
||||||
|
|
|
|
|
|
|
|
dр |
|
d m υ |
|
|
|
|
|
|
Fрез . |
(1.30а) |
||
|
dt |
dt |
||||
|
|
|
|
|||
Второй закон Ньютона в проекциях на координатные оси:
63

ma |
|
|
d m x |
|
F |
|
|
, |
|
||
x |
|
|
рез |
|
|||||||
|
|
|
|
dt |
|
x |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ma |
|
|
d m y |
|
F |
|
|
, |
(1.30б) |
||
y |
|
рез |
|||||||||
|
|
|
|
dt |
|
y |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
maz |
|
|
d( m z ) |
Fрез |
|
|
|||||
|
|
dt |
|
|
|||||||
|
|
|
|
|
|
|
|
|
z |
|
|
Связь между импульсом силы F dt и изменением импульса тела dp |
|
||||||||||
|
|
|
|
|
|
|
|
|
(1.30в) |
||
F dt dp , |
|
|
|
|
|||||||
Второй закон Ньютона в проекциях на касательное и нормальное направления к траектории в данной точке:
|
|
|
|
m |
d |
F |
, |
|
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
m |
2 |
F |
|
, |
(1.30г) |
||
|
|
|
|
|
|
R |
n |
|
|
||
|
|
|
|
|
|
|
|
|
|||
где Fτ – проекция вектора силы |
F |
на направление касательной к траектории, Fn |
|||||||||
- компонента силы |
|
, приводящая к криволинейности траектории и направ- |
|||||||||
F |
|||||||||||
ленная к центру кривизны траектории. Эту силу называют центростремительной силой.
20) Третий закон Ньютона.
Силы, с которыми два тела действуют друг на друга, равны по величине, направлены в противоположные стороны
|
|
|
|
|
|
|
F12 |
F21 |
(1.31) |
|
|
|
|
|
где F12 – сила, действующая со стороны второго тела на первое, приложена к |
||||
первому телу, |
|
– сила, действующая на второе тело со стороны первого, |
||
F21 |
||||
приложена ко второму телу. По модулю эти силы равны: |
F12 = F21. |
|||
Основные соотношения динамики вращательного движения
21) Момент силы относительно оси — это характеристика вращательного действия силы, равная произведению модуля силы F , действующей на твердое тело, на плечо силы этой силы относительно данной оси. Плечо силы равно величине перпендикуляра d , опущенного от оси вращения на направление действия силы.
M F d |
(1.32) |
Момент силы, которая вызывает вращение тела вокруг данной оси по часовой стрелке, является отрицательным, а момент силы, вращающей тело против часовой стрелки, — положительным.
22) Момент инерции тела относительно оси вращения I — это физическая ве-
личина, которая является мерой инертности тела во вращательном движении
64
вокруг этой оси, равна сумме произведений масс всех частиц тела на квадраты их расстояний до оси вращения.
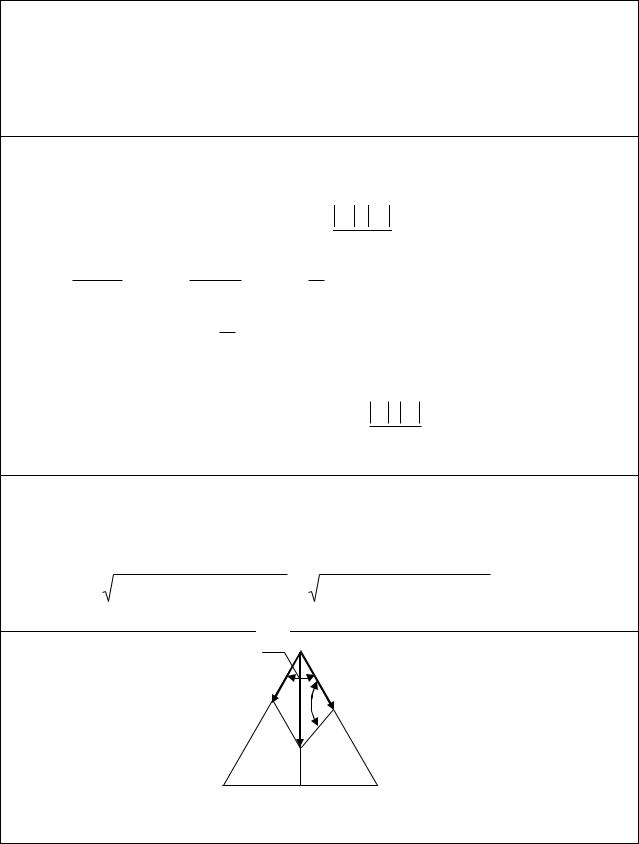
23) Момент инерции тела относительно произвольной оси АА' равен сумме момента инерции тела относительно оси ОО', проходящей через центр масс тела и параллельной данной оси АА', и произведения массы тела как целого на квадрат расстояния d между осями АА' и ОО' (рисунок П 1.2):
I |
AA' |
I |
OO' |
m d 2 . |
(1.33) |
|
|
|
|
||
A |
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
A
Рисунок П 1.2.– Иллюстрация к теореме Штейнера.
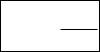
24) Таблица П 1 – Моменты инерции тел правильной формы относительно оси вращения, проходящей через центр масс.
Тело |
|
|
|
Рисунок |
Положение оси |
Момент |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
ОО' |
инерции |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
IOO' |
|
|
|
|
|
|
|
|||
Полый |
|
|
|
|
|
|
|
|
|
|
Ось цилиндра |
|
|
|
|
|
|
|
|
|
|
|
тонкостенный |
ци- |
|
|
|
|
|
|
|
|
|
|
|
|
|
m R |
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
линдр радиуса |
R и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
массы m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Толстостенный |
|
|
|
|
|
|
|
|
|
|
Ось цилиндра |
|
m( R2 |
2 R1 |
2 ) |
|
||||||
цилиндр массы m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(R1 , R2 -внутренний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и внешний радиусы) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Сплошной цилиндр |
|
|
|
|
|
|
|
|
|
Ось цилиндра |
|
|
|
m R |
2 |
|
|
|
|
|||
(диск) массы |
m и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||
радиуса R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шар массы m и |
|
|
|
|
|
|
|
|
|
|
Ось проходит че- |
|
|
2m R |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
рез центр шара |
|
|
|
|
|
|
|
||||
радиуса R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
65

Стержень длиной l и |
|
|
|
|
|
|
|
Ось перпендику- |
|
|
m l |
2 |
|
|
|
|
массы m |
|
|
|
|
|
|
|
лярна стержню, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
12 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
проходит через |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
его середину |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тонкостенная сфера |
|
|
|
|
|
|
|
Ось проходит че- |
|
2m R |
2 |
|
|
|||
массы m и радиуса R |
|
|
|
|
|
|
|
рез центр сферы |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
3 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24) Вектор момента импульса |
|
материальной точки относительно некоторого |
||||||||||||||
L |
||||||||||||||||
начала отсчёта определяется векторным произведением радиус - вектора части-
цы относительно выбранного неподвижного в данной системе отсчёта начала |
||||
отсчёта, и импульс частицы |
|
|
|
|
p : |
L r |
p |
||
В общем случае вектор момента связан с вектором угловой скорости через линейный оператор момента инерции (тензор инерции):
|
|
(1.34) |
L I |
||
Момент импульса направлен вдоль оси вращения так, чтобы его направление совпадало с поступательным движением правого винта.
25) Второй закон Ньютона для вращательного движения (основной закон динамики вращательного движения):
|
|
|
|
|
|
||
|
|
dL |
|
||||
|
M |
I |
|
|
(1.35) |
||
|
dt |
||||||
|
|
|
|
|
|
||
26) |
Кинетическая энергия вращения тела: |
|
|
|
|
|
|
|
W |
|
I 2 |
|
|
|
(1.36) |
|
2 |
|
|
|
|||
|
|
|
|
|
|
||
27) |
Работа, совершенную моментом силы при вращательном движении: |
|
|||||
|
А М |
|
|
(1.37) |
|||
Работа и энергия.
21) Работа постоянной силы.
Работой А постоянной силы называется скалярное произведение вектора силы |
|||||||||
|
и вектора перемещения r : |
|
|
|
|
|
|||
F |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
(1.32) |
|
A F |
r |
F |
|
r |
cos ; где F , |
r |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
66 |
|
|
Работа – скаляр. Если |
А 0 , то говорят, |
что сила совершает работу, а если |
||||
А 0 , то работа совершается против действия силы. |
|
|||||
22) Работа переменной силы. |
|
|
|
|
||
|
|
|
|
|
|
(1.33) |
A F |
dr F dr cos |
F ds , где F , |
d r и dr cos ds . |
|||
L |
L |
L |
|
|
|
|
23) Если работа силы не зависит от траектории движения тела, а определяется только начальной и конечной точкой, то такая сила называется потенциальной (консервативной). Для потенциальной силы работа по замкнутому контуру равна нулю.
24) Мгновенная мощность есть производная по времени от работы силы F , т.е.
мощность равна скалярному произведению действующей силы на скорость тела или системы.
|
dA |
|
|
|
|
N |
|
|
(F |
υ) F υ cos α , |
(1.34) |
dt |
|||||
25) Энергия.
Физическая величина, характеризующая способность тела или системы тел совершить работу, называется энергией.
Механическая энергия может быть обусловлена:
–или движением тела с некоторой скоростью – кинетическая энергия,
–или расположением данного тела в системе других тел определенной кон-
фигурации – потенциальная энергия.
Механическая энергия равна сумме потенциальной и кинетической энергий:
Wмех Wкин Wпот . |
(1.35) |
26) Кинетическая энергия - энергия его механического движения тела. Изменение кинетической энергии тела под действием силы равно работе этой силы:
|
t |
t |
d |
υ2 |
m υ2 |
2 |
|
mυ1 |
2 |
|
|
A |
Fds ma dt m |
dt m υ dυ |
|
|
|
, |
(1.36) |
||||
|
|
|
|
|
|||||||
L |
0 |
0 |
dt |
υ2 |
2 |
2 |
|
|
|
||
где m – масса тела, начальная скорость 1 , конечная скорость 2 .
Кинетическая энергия движущегося тела равна Wкин. m 2 . 2
27) Потенциальная энергия – энергия, определяемая взаимным расположением тел или отдельных частей тела относительно друг друга, т.е. потенциальная энергия зависит от конфигурации системы.
Соотношение, связывающее работу потенциальной силы с изменением потенциальной энергии системы, имеет вид:
A Wпот Wпот 1 Wпот 2 , |
(1.37) |
где Wпот – приращение потенциальной энергии.
28) Потенциальная энергия тяготения (тело находится в силовом или потенциальном поле тяготения Земли) равна:
W |
|
m g h , |
(1.38) |
пот |
тяг |
|
|
67 |
|
|
|
где h – расстояние тела от поверхности Земли. Для потенциальной энергии обязательно указывается точка отсчета, где 0 . В случае тела, поднятого над
Землей, нулевой конфигурацией системы является тело на поверхности Земли.
29) Потенциальная энергия упругости ̶ характеристика потенциального поля сил упругости в растянутой (или сжатой) пружине и в других деформированных телах:
Wпот упр |
|
k х2 |
, |
(1.39) |
|
||||
|
2 |
|
|
|
где k - коэффициент жесткости пружины, а х – изменение длины (деформация) растянутой или сжатой пружины, отсчет х ведется от положения равновесия
(где пружина недеформирована), в котором Wпот упр 0.
30) Связь работа и энергии.
Работа – мера изменения энергии (физический смысл работы).
Теорема о кинетической энергии: работа всех сил приводит к изменению кинетической энергии теле (или системы тел)
Aвсех сил Wкин Wкин конечная Wкин начальная |
(1.40) |
Работа потенциальной силы, приводящая к изменению конфигурации системы, равна приращению потенциальной энергии, взятому со знаком минус.
Aпот Wпот Wпот начал ьная Wпот конечная |
(1.41) |
Иногда изменение потенциальной энергии формулируется как теорема о потенциальной энергии: работа потенциальной энергии консервативных сил, приложенных к системе, равна убыли её потенциальной энергии.
Законы сохранения.
31) Закон сохранения импульса.
Полный вектор импульса замкнутой системы есть величина постоянная при
любых взаимодействиях внутри данной системы. |
|
|
|
const . |
(1.42) |
рсист |
||
32) Закон сохранения энергии.
Полная механическая энергия замкнутой системы, в которой не действуют диссипативные силы, остается постоянной, независимо от взаимодействий внутри системы.
Wмех Wмех конечная Wкин Wпот const . (1.43)
33) Закон сохранения момента импульса Если момент внешних сил относительно неподвижной оси вращения тела
тождественно равен нулю, то момент импульса тела относительно этой оси
не изменяется в процессе движения, т.е. если М |
|
|
dLZ |
0 , тогда |
|
z |
dt |
||||
|
|
|
|||
|
|
|
|
||
LZ IZ const |
(1.48) |
||||
68
|
|
|
|
|
|
|
|
|
2. ЭЛЕКТРОДИНАМИКА |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
Электростатика |
|
|
|
||||||
1) Закон сохранения электрического заряда: |
|
|
|
|
|||||||||||||||
Алгебраическая сумма зарядов тел или частиц, образующих электрически |
|||||||||||||||||||
замкнутую систему, остается постоянной независимо от процессов, происхо- |
|||||||||||||||||||
дящих в этой системе |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qi |
const . |
|
(2.1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
2) Закон Кулона. Сила взаимодействия двух точечных зарядов в вакууме |
|||||||||||||||||||
пропорциональна произведению модулей зарядов q1 |
и q2 и обратно пропор- |
||||||||||||||||||
циональна квадрату расстояния между ними (закон Кулона): |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
F k |
q1 q2 |
, |
|
(2.2) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
|
|
|
|
где k |
|
1 |
|
|
|
9 109 |
Н м2 |
|
м |
, |
|
– коэффициент пропорционально- |
|||||||
|
|
|
|
|
|
9 109 |
|
|
|||||||||||
|
4 0 |
|
|
|
Кл2 |
|
|
Ф |
|
|
|
|
|
|
|
||||
сти в СИ: а |
|
|
8,85 10 |
12 Ф |
– электрическая постоянная. |
|
|||||||||||||
0 |
м |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для взаимодействия двух зарядов в диэлектрике с диэлектрической проница- |
|||||||||||||||||||
емостью |
(табличная величина): |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
F k |
q1 q2 |
|
(2.2а) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
( 1 для вакуума или приближенно для воздуха, 1 -– для диэлектриков). |
|||||||||||||||||||
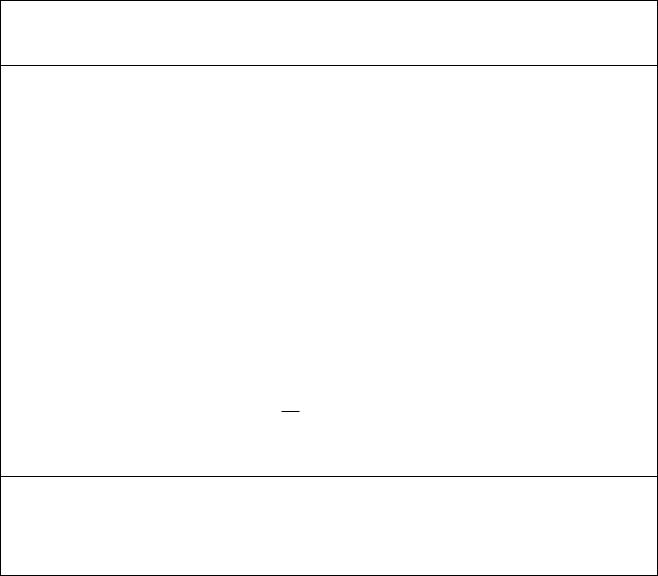
3) Если имеется система электрических зарядов, то на каждый заряд системы |
|||||||||||||||||||
действуют независимо силы со стороны остальных зарядов (принцип незави- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
симости действия сил) |
|
Fрез |
F1 |
F3 |
, величина которой определяется по тео- |
||||||||||||||
реме косинусов: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
F |
рез |
|
|
F 2 |
F 2 2F F cos |
F 2 |
F 2 |
2F F cos ; |
(2.3) |
||||||||||
|
|
|
|
|
1 |
3 |
|
1 |
3 |
|
|
1 |
|
3 |
1 |
3 |
|
||
где углы и |
|
|
указаны на рисунке П.2.1. |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
– q2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F3 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fрез. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ q3 |
|
|
|
|
|
|
+ q1 |
|
|
|
Рисунок П.2.1. – Силы, действующие на заряд q2 со стороны других зарядов электрической системы.
69
4) Электрическое поле характеризуется в каждой точке напряженностью E и потенциалом φ.
Принцип суперпозиции (принцип независимости создания электрических полей в данной точке пространства) верен и для любых зарядов системы.
Если имеется система зарядов или любых заряженных тел, то каждое из них в данной точке пространства создает поле, независимо от других. При наложении этих полей образуется результирующее поле, для каждой точке
которого: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
E |
E1 |
E2 |
E3 |
... |
Ei |
, |
(2.4) |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
(для Ei |
суммирование векторное); |
... i |
|
|
|
||||
|
|
рез 1 |
2 |
3 |
, |
|
(2.5) |
||
i
(суммирование алгебраическое (скалярное), т.е. с учетом знаков потенциа-
лов).
Ei , i – характеристики электрического поля, создаваемого i –м зарядом или
протяженным заряженным телом.
5) Соотношения между напряженностью и потенциалом электрического
поля: E , где – разность потенциалов на расстоянии l . Знак ми- |
|||||||||
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
нус означает, что направление вектора |
E противоположно направлению ро- |
||||||||
ста потенциала. |
|
|
|
|
|
|
|
|
|
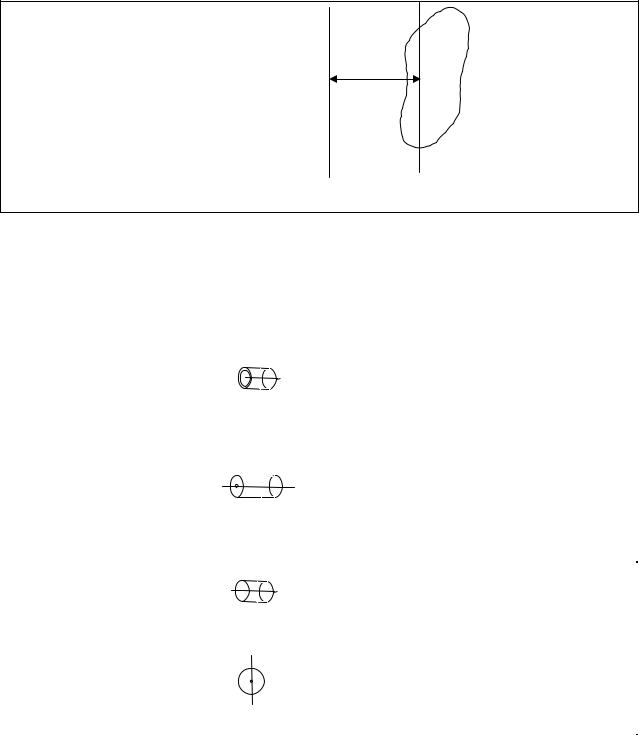
6) Электрическое поле точечного за- |
E |
q0 |
|
|
kq0 |
; |
|||
ряда q0 на расстоянии r |
от него в |
|
4 0 r |
2 |
|
r |
2 |
|
|
среде с диэлектрической |
проницае- |
|
|
|
|
|
|||
|
q0 |
|
|
kq0 |
|
|
|||
мостью ε. |
|
|
|
|
|
(2.6) |
|||
|
4 0 r |
r |
|
||||||
r |
Потенциал – скаляр, его знак зависит |
||||||||
E |
|||||||||
|
от знака заряда, создающего поле. |
||||||||
q0 |
|
||||||||
|
|
|
|
|
|
|
|
||
Рисунок П.2.2.
7) Электрическое поле равномерно |
Вне сферы: |
|
|
|
|
|
||||
заряженной сферы радиуса R в точке |
Eвне |
|
|
qcф |
|
kqсф |
; |
|||
С на расстоянии a от её поверхно- |
|
4 0 R a 2 |
R a 2 |
|||||||
сти. |
вне |
|
|
qсф |
|
|
|
kqсф |
|
(2.7) |
|
4 0 R a |
R a |
|
|||||||
|
С |
Внутри сферы потенциал и напря- |
||||||
|
|
|||||||
|
|
женность соотносительно равны: |
|
|||||
а |
|
внутри |
|
qсф |
|
kqсф |
, |
(2.8) |
R |
|
4 0 R |
R |
|||||
|
|
|
|
|
|
|
||
Рисунок П.2.3. |
Евнутри 0 |
|
|
|
70 |