

651_Zelentsov_B.P._Matrichnye_modeli_funktsionirovanija_
.pdfПерейдем теперь к укрупнению состояний. Матрицы вероятностей возвращения AU и AV состоят из одинаковых строк. В каждой из них имеется нулевой столбец. Удалив его и соответствующую строку, получим:
AU = ( 1 ); AV = ( 1 ); rU = ( 1 ); rV = ( 1 ),
где |
r |
описывает состояние w , |
а |
r |
|
– возвращение в состояние w . |
||||||||||||||||||||||||||||||||||||||||||
|
U |
|
|
|
|
|
|
|
1 |
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||||||
Усечение матричных характеристик подмножеств: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
μ |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
λ |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
T |
|
= |
|
|
|
|
|
|
|
|
|
|
; |
T |
|
= |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
U |
4λ |
|
|
|
|
2λ |
|
|
V |
|
|
|
|
μ |
|
|
μ |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Вычисление характеристик эквивалентных состояний: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
μ |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
λ |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
t |
= r |
·T |
|
|
|
|
|
|
t |
|
= r |
·T |
|
= |
. |
|||||||||||||||||||||||||||||||
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||||||||||||||||||||||
|
|
|
U |
|
U |
|
U |
4λ |
|
|
|
|
2λ |
|
V |
|
|
|
V |
|
|
V |
|
|
|
|
μ |
|
|
|
μ |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Средние времена нахождения в подмножествах U и V: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
·e = |
μ |
|
|
+ |
1 |
; |
|
|
·e |
|
λ 1 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
tU = t |
|
|
tV = t |
|
= |
|
+ |
|
. |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
U |
|
|
4λ |
2 |
|
|
|
|
2λ |
|
|
|
|
|
V |
|
|
|
|
|
|
μ2 |
|
μ |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
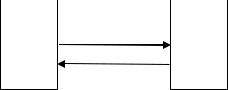
Таким образом, каждое из подмножествах U и V можно заменить одним состоянием, обозначенных u и v на рис. 8.2, то есть данную систему из четырех состояний можно представить системой из двух состояний. При этом сохраня-
ются средние времена нахождения в состояниях (tu = 2550 час ; tv = 1,01 час), коэффициент простоя и частота отказов системы.
1
u  v
v
1
Рис. 8.2. Укрупненная система из двух состояний
8.2. МОДЕЛЬ ФУНКЦИНИРОВАНИЯ ДУБЛИРОВАННОЙ СИСТЕМЫ
Рассматривается дублированная система, которая состоит из двух элементов
(устройств), обозначаемых Э1 и Э2. Элемент Э1 будем считать основным, а
элемент Э2 – резервным. Элементы полностью дублируют выполняемые функции. Система работоспособна, если работоспособен хотя бы один элемент, и система отказывает, если отказывают оба элемента. Если отказывает основной элемент, то его функции выполняет работоспособный резервный элемент. Отказы основного и резервного элементов обнаруживаются при их возникновении. Система является восстанавливаемой, то есть после отказа оба элемента восстанавливаются. Выберем вариант такой системы в соответствии со следующими особенностями.
81

Особенности, связанные с безотказностью и функционированием элементов:
1)если оба элемента работоспособны, то функционирует основной элемент,
арезервный находится в ненагруженном (холодном) режиме; в этом состоянии отказать может только основной элемент, а резервный отказать не может;
2)если работоспособен только один элемент, то он и выполняет функции (функционирует), при этом он может отказать.
Особенности, связанные с восстановлением:
1)имеется один восстанавливающий орган (случай ограниченного восстановления), что означает: одновременно может восстанавливаться только один элемент;
2)восстановление основного элемента начинается одновременно с его отка-
зом;
3)приоритет в восстановлении имеет основной элемент, то есть при отказе двух элементов сначала восстанавливается основной элемент, а затем – резервный.
Для упрощения задачи будем полагать, что основной и резервный элементы имеют одинаковые характеристики безотказности и ремонтопригодности: интенсивность отказов обозначена через λ, а интенсивность восстановления – через μ.
Для обозначения состояний (фаз) эксплуатации элементов используется следующая символика: Ф – функционирование работоспособного элемента; Н – неработоспособное состояние элемента; Х – холодный (ненагруженный) режим резервного элемента; В – восстановление элемента. На графе состояний индекс при этих состояниях указывает элемент: для основного элемента используется индекс 1, а для резервного – индекс 2.
Состояния дублированной системы обозначены такой комбинацией букв и индексов, чтобы эта комбинация полностью характеризовала состояние систе-
мы. Возможны следующие состояния системы: Ф1Х2 – основной элемент функ-
ционирует, а резервный находится в холодном (ненагруженном) режиме; В1Ф2
– резервный элемент функционирует, а основной восстанавливается; Ф1В2 –
основной элемент функционирует, а резервный восстанавливается; В1Н2 – основной элемент восстанавливается, а резервный находится в неработоспособном состоянии (ожидает начало восстановления). Переходы от состояния к состоянию показаны на рис. 8.3.
1. Ф |
Х |
2 |
μ |
|
3. |
Ф В |
||
1 |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
||
λ |
μ |
|
|
λ |
|
μ |
||
|
|
|
|
λ |
|
|
||
2. В Ф |
2 |
|
4. |
В Н |
||||
1 |
|
|
|
|
1 |
2 |
||
|
|
|
|
|
|
|
|
|
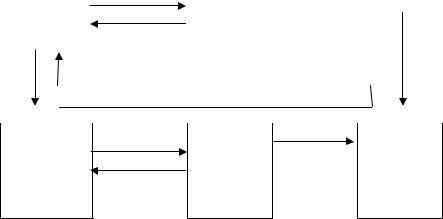
Рис. 8.3. Граф состояний дублированной системы
82
В состоянии 1 может отказать только основной элемент (переход в состояние 2). В состоянии 2 функционирует резервный элемент, а основной элемент восстанавливается. Функционирующий резервный элемент может отказать с интенсивностью λ, что вызывает переход в состояние 4, в котором продолжается восстановление основного элемента, а неработоспособный резервный элемент «стоит в очереди на восстановление». После завершения восстановления основного элемента происходит переход в состояние 3, где восстановление пе-
реключается на резервный элемент (В2), а функционирующий основной может опять отказать с интенсивностью λ, что вызывает переход в состояние 4, в котором в соответствии с приоритетом сначала восстанавливается основной элемент, а резервный, находясь в неработоспособном состоянии, «стоит в очереди на восстановление». Очевидно, что в состояниях 1, 2, 3 система работоспособна, а в состоянии 4 – неработоспособна.
Следует отметить, что рассмотренный здесь пример является простым, иллюстративным. В реальных дублированных системах элементы системы имеют разные интенсивности отказов и восстановления, что обусловлено их разной конструкцией, они могут быть продуктом разных фирм, произведены в разное время, имеют разную технологию и трудоемкость устранения отказов. Кроме того, могут быть более сложные связи между элементами и их состояниями, например, элементы системы могут быть охвачены контролем технического состояния и профилактическим обслуживанием.
Найдем предельные вероятности состояний по формуле (2.13) и на их основе вычислим коэффициенты готовности и простоя системы. Для этого составим матрицу интенсивностей:
|
λ |
λ |
0 |
0 |
|
|
|
|
|
(λ μ) |
0 |
|
|
Λ = |
μ |
λ |
||||
|
μ |
0 |
(λ μ) |
λ |
. |
|
|
|
|
||||
|
|
0 |
0 |
μ |
|
|
|
|
μ |
||||
Соответствующие определители, полученные из матрицы Λ:
|
(λ μ) |
0 |
|
λ |
= – (λ + μ)μ2; |
|
λ |
0 |
|
|
0 |
= – λμ2; |
|||
1 = |
|
0 |
(λ μ) |
|
λ |
2 = |
μ |
(λ μ) |
λ |
||||||
|
|
0 |
μ |
|
μ |
|
|
|
|
0 |
μ |
μ |
|
||
|
λ |
λ |
0 |
|
= – λ2μ; 4 = |
|
λ |
λ |
0 |
|
|
= – λ2(λ + μ). |
|||
|
|
|
|
||||||||||||
3 = |
μ (λ μ) λ |
|
|
μ |
(λ μ) |
0 |
|
|
|||||||
|
0 |
0 |
μ |
|
|
|
|
μ |
0 |
|
(λ μ) |
|
|
|
|
Сумма определителей: |
= 1 + 2 + 3 + |
4 = – (λ + μ)·( λ2 + |
|
λμ + μ2). |
|||||||||||
Теперь получаем формулы для вычисления предельных вероятностей состоя-
ний:
π1 = – μ2/( λ2 + λμ + μ2); π2 = – λμ2/ Δ; π3 = – λ2μ / Δ; π4 = – λ2/( λ2 + λμ + μ2).
83
Коэффициенты готовности и простоя системы:
Кг = π1 + π2 + π3 = (λ + μ)·μ /( λ2 + λμ + μ2); Кп = π4 = λ2/( λ2 + λμ + μ2).
Для значений λ = 0,01 1/час и μ = 1 1/час получаем следующие значения предельных вероятностей состояний:
π1 = 0,9900; π2 = 0,0098; π3 = 0,0001; π4 = 0,0001.
Значения коэффициентов готовности и простоя: Кг = 0,9999; Кп = 0,0001. Для сравнения найдем коэффициенты готовности и простоя одного восстанавливаемого устройства (рис. 8.4), коэффициенты готовности и простоя кото-
рого обозначены через Кг и Кп : |
|
|
|
|
|
||
К |
= |
π = μ/( λ + μ); К |
= π |
2 |
= λ/( λ + μ). |
||
г |
|
1 |
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Ф |
λ |
|
|
2. В |
|
μ
Рис. 8.4. Граф состояний одного восстанавливаемого устройства
Для значений λ = 0,01 1/час и μ = 1 1/час получаем Кг= 0,99; Кп = 0,01. Эффект от использования дублирования выразим в виде отношения коэф-
фициентов простоя:
Eff = Кп/Кп = (α + α2)/(1+ α + α2),
где α = λ/μ – отношение интенсивностей отказов и восстановления.
Для приведенных значений λ и μ получаем Eff = 0,01, то есть коэффициент простоя дублированной системы уменьшается в 100 раз по сравнению с коэффициентом простоя одного элемента с такими же исходными параметрами.
Разобьем множество состояний на два подмножества по признаку безотказности: подмножество работоспособных состояний U = {1, 2, 3} и подмножество неработоспособных состояний V = {4}. Соответствующие подматрицы интен-
сивностей имеют вид: |
|
|
|
|
|
|
|
|
λ |
|
λ |
0 |
|
|
0 |
|
|
|
|
(λ μ) |
0 |
|
|
|
|
|
UU = μ |
; UV = λ ; |
|||||||
|
μ |
|
0 |
|
|
|
λ |
|
|
|
(λ μ) |
|
|
||||
|
VU = (0 |
0 μ) ; VV = μ . |
|
|
|
|||
Выведем формулы для вычисления математического ожидания и дисперсии времени нахождения в подмножестве работоспособных состояний. Для любых начальных условий следует находить матрицу TU путем обращения матрицыUU. Матрица TU имеет вид:
84
|
|
(λ μ)/λ2 |
1/λ |
0 |
|
||
1 |
|
|
2 |
|
|
|
|
= |
μ/λ |
1/λ |
0 |
. |
|||
TU = – UU |
|
||||||
|
|
|
2 |
|
|
|
|
|
|
μ/λ |
μ/λ(λ μ) |
1/(λ μ) |
|
||
|
|
|
|
||||
Замечание. Матрицу TU можно получить вручную несколькими методами или с помощью таких инструментов, как Mathcad или Mathlab.
В табл. 8.2. приведены формулы для математического ожидания и дисперсии времени нахождения в подмножестве U при трех начальных условиях:
1)состояние 1 является начальным, rU = r1;
2)состояние 2 является начальным, rU = r2;
3)состояние 3 является начальным, rU = r3.
Табл. 8.2. Формулы для вычисления математического ожидания tU и дисперсии DU времени нахождения в подмножестве U при разных начальных условиях
ri |
|
|
tU |
DU |
r1= (1 |
0 |
0) |
(2λ + μ)/λ2 |
(2λ2 + 4λμ + μ2)/λ4 |
r2= (0 |
1 |
0) |
(λ + μ)/λ2 |
(λ2+ 4λμ + μ2)/λ4 |
r3= (0 |
0 |
1) |
(λ+ μ)/λ2 |
(λ2+ 4λμ + μ2)/λ4 |
Видно, что значения характеристик подмножества U зависят от начального состояния. Однако насколько существенна эта зависимость, определяется также значениями исходных параметров (в данном случае λ и μ). В табл. 8.3 приведены значения математического ожидания tU и среднего квадратического отклонения σU для двух вариантов значений параметров λ и μ (значения приведены в часах).
Табл. 8.3. Значения математического ожидания tU и среднего квадратического отклонения σU времени нахождения в подмножестве U при разных начальных условиях λ μ
|
|
Значения исходных параметров |
|
|||
|
λ = 0,1 1/час и μ = 1 1/час |
λ = 0,01 1/час и μ = 1 1/час |
||||
ri |
tU |
|
σU |
tU |
|
σU |
r1= (1 0 0) |
120 |
|
119 |
10200 |
|
10200 |
r2= (0 1 0) |
110 |
|
119 |
10100 |
|
10200 |
r3= (0 0 1) |
110 |
|
119 |
10100 |
|
10200 |
85
В данной системе при заданных значениях интенсивности отказов и интенсивности восстановления среднее время безотказной работы tU и среднее квадратическое отклонение этого времени σU практически не зависят от начального состояния. Кроме того, среднее время безотказной работы и среднее квадратическое отклонение этого времени практически совпадают. Это свидетельствует о том, что время безотказной работы рассматриваемой дублированной системы можно считать распределенным по показательному закону при любом начальном состоянии.
Рассмотрим циклическое функционирование системы. Матрицы вероятностей попаданий и матрицы вероятностей возвращения:
1
BUV = – UU1 UV = 1 ; BVU = – VV1 VU = 0 0 1 ;
1
0 |
0 |
1 |
|
|
|
|
|
AU = BUV·BVU = 0 |
0 1 ; AV = BVU·BUV = ( 1 ). |
||
|
0 |
0 |
|
|
1 |
||
Предельные распределения вероятностей возвращения имеют вид:
rU = 0 |
0 1 ; |
rV = 1 . |
Средние времена нахождения в подмножествах состояний: tU = –rU · UU1 ·e = (λ+μ)/λ2; tV = –rV · VV1 ·e = 1/μ.
В рассматриваемой модели tU имеет смысл среднего времени безотказной работы, а tV – среднего времени восстановления. Среднее время цикла:
tUV = tU + tV = (λ2+λμ+μ2)/λ2μ.
Отсюда коэффициенты готовности и простоя системы:
Кг = tU /tUV = (λ + μ)μ / ( λ2 + λμ + μ2) ; Кп = tV /tUV = λ2 / ( λ2 + λμ + μ2),
что согласуется с ранее полученным результатом.
Эти показатели в числах при λ = 0,01 1/час и μ = 1 1/час: tU = 10 000 час, tV =
1 час, tUV = 10 001 час, Кп = tV /tUV = 0,0001.
Исследуем систему с помощью частотного метода. Подматрицы частот переходов:
|
|
|
|
0 |
|
|
|
|
|
UV = dgUU UV |
|
|
|
|
|
VU = dgVV VU = 0,0001 . |
|
|
= 0,0001 |
; |
||||||
|
|
|
|
|
|
6 |
|
|
|
|
|
1 10 |
|
|
|
||
Вычислим частоты переходов между подмножествами состояний: |
||||||||
ωUV = |
e |
· UV ·e = 0,0001; |
ωVU |
= |
e |
· VU ·e = 0,0001. Видно, что ωUV = ωVU = |
||
= 1/tUV, что согласуется с ранее полученным результатом.
Рассмотрим теперь возможность укрупнения состояний. Усеченные матри-
цы вероятностей возращения: A |
= ( 1 ); |
A |
= ( 1 ). Предельные распределе- |
|||
|
U |
|
|
V |
|
|
ния вероятностей возращения: |
r |
|
= ( 1 ); |
r |
|
= ( 1 ). |
|
U |
|
V |
|
||
|
|
|
86 |
|
|
|

Усеченные матрицы средних времен нахождения в состояниях:
T |
|
|
μ |
|
μ |
1 |
|
|
T |
|
= T |
|
1 |
|
||
|
= |
|
|
|
|
|
|
; |
|
= |
|
. |
||||
|
|
|
|
|
|
|
|
|
||||||||
U |
|
|
|
λ(λ μ) |
|
|
|
|
V |
V |
|
μ |
|
|||
|
|
|
λ2 |
|
|
λ μ |
|
|
|
|
|
|||||
Средние времена нахождения в подмножествах U и V: |
|
|||||||||||||||
tU = |
rU ·TU ·e = (λ+μ)/λ2; |
tV = |
rV ·TV ·e |
= 1/μ. |
||||||||||||
8.3.МОДЕЛЬ ФУНКЦИНИРОВАНИЯ ОБОРУДОВАНИЯ В УСЛОВИЯХ КОНТОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ
Устройство функционирует в условиях недостоверного контроля. Отказы устройства обнаруживаются только при проверках в рамках периодического контроля, который является недостоверным. Имеются ошибки контроля I рода с вероятностью α и ошибки контроля II рода с вероятностью β. Во время проверки устройство отказать не может.
Полагается, что все события происходят в случайные моменты времени, а время до наступления этих событий распределено по показательному закону с соответствующей интенсивностью. Соответственно время нахождения процесса в каждом состоянии является случайным и распределено по показательному закону.
Принято, что периодические проверки проводятся в случайные моменты времени. Одним из факторов, обуславливающих случайность периодических проверок, является следующий: зачастую периодические проверки проводятся в то время, когда оборудование простаивает (не нагружено), а эти моменты времени случайны. Алгоритм проверок может также вносить элементы случайности в продолжительность проверок.
Граф состояний приведен на рис. 8.5. Для удобства составления модели состояния пронумерованы и снабжены буквенными обозначениями. Строки и столбцы используемых матриц интенсивностей расположены в порядке номеров состояний.
Рассматривается вариант модели с пятью состояниями: ФР – функционирование работоспособного устройства;
ФН – функционированиенеработоспособногоустройства(имеетсяскрытыйотказ); ПР – периодическая проверка работоспособного устройства; ПН – периодическая проверка неработоспособного устройства; В – восстановление устройства.
Использованы следующие обозначения: λ – интенсивность отказов;
γ – интенсивность начала периодической проверки;
μп – интенсивность завершения периодической проверки; μв – интенсивность завершения восстановления;
α – вероятность ошибки контроля I рода;
β - вероятность ошибки контроля II рода.
87
В случайный момент времени происходит отказ устройства с интенсивностью λ (переход 1→2). С интенсивностью γ производится проверка устройства с экспоненциальным распределением ее начала. В результате ошибки контроля первого рода
работоспособное устройство с интенсивностью αμп поступает на восстановление
(переход 3→5) и с интенсивностью (1– α)μп продолжает функционировать. Если проверяется неработоспособное устройство, то в результате ошибки контроля второ-
го рода неработоспособное устройство с интенсивностью βμп возвращается на функционирование (переход 4→2) и с интенсивностью (1–β)μп поступает на восстановление. После восстановления имеет место переход в работоспособное состояние
1 с интенсивностью μв.
1. ФР |
γ |
3. ПР |
|
|
|
|
(1– α) μп |
|
|
|
|
||
|
|
|
|
|||
|
|
|
|
|
|
|
μв |
|
|
|
αμп |
||
λ |
|
|
|
|
||
2. ФН γ |
4. ПН (1– β) μ |
п |
5. В |
|||
|
|
|
|
|
|
|
βμп
Рис 8.5. Граф состояний эксплуатации устройства
Матрица интенсивностей имеет вид:
|
(λ γ) |
λ |
γ |
0 |
0 |
|
|
|
|
0 |
γ |
0 |
γ |
0 |
|
|
|
|
|||||
Λ = |
|
(1 α)μп |
0 |
μп |
0 |
αμ п |
|
|
. |
||||||
|
|
0 |
βμ п |
0 |
μп |
(1 β)μп |
|
|
|
μв |
0 |
0 |
0 |
μв |
|
|
|
|
|||||
Проверка правильности составления матрицы интенсивностей: |Λ| = 0. Вычисления предельных вероятностей состояний в символьном виде с по-
мощью определителей или путем обращения матриц приводит к сложным формулам. Вычисления упрощаются при составлении модели на основе полумарковского процесса.
88

По матрице интенсивностей найдем матрицу вероятностей прохождений:
|
|
|
0 |
λ/(λ γ) |
γ/(λ γ) |
0 |
0 |
|
|
|
|
0 |
0 |
0 |
1 |
0 |
|
|
|
|
|
|||||
1 |
= |
|
|
0 |
0 |
0 |
α |
|
P= E – dg |
1 α |
. |
||||||
|
|
|
0 |
β |
0 |
0 |
1 β |
|
|
|
|
1 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|||||
Перейдем к циклическому функционированию с применением укрупнения состояний. Множество состояний системы разобьем на подмножества U и V по признаку фаз эксплуатации: U = {1, 2, 3, 4} и V = {5}. Разбиение матрицы P на подматрицы:
|
|
|
0 |
|
|
λ/(λ γ) |
γ/(λ |
γ) |
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
0 |
0 |
1 |
|
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||
|
PUU = |
1 α |
|
0 |
0 |
0 |
; PUV = |
|
α |
; |
|
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
0 |
|
|
β |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 β |
|
|||||||
|
|
|
|
PVU = 1 0 0 |
0 ; |
PVV = 0 . |
|
|
|
|
|
||||
|
Матрица относительных частот подмножества U: |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
λ γ |
|
λ/(1 β) |
|
|
γ |
|
|
λ/(1 β) |
|
|
|
|
1 |
|
|
0 |
(λ αγ)/(1 β) |
0 |
|
|
|
|
|||
|
–1 |
|
|
|
(λ αγ)/(1 β) |
||||||||||
NU |
= (E –PUU ) = |
|
|
· |
|
(1 α)(λ γ) |
(1 α)λ/(1 β) |
λ γ |
|
(1 α)λ/(1 β) |
. |
||||
λ αγ |
|
||||||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
0 |
β(λ αγ)/(1 β) |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
(λ αγ)/(1 β) |
||||||||
Матрицы вероятностей попаданий и матрицы вероятностей возвращения:
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BUV = (E –P )–1·P = |
1 |
; |
|
BVU = (E –P )–1·P = 1 0 |
0 0 ; |
||||||||
UU |
UV |
|
|
|
|
|
|
|
|
|
VV |
VU |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
0 |
0 |
0 |
|
|
|
|
|
||
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
AU = BUV·BVU = |
1 |
|
|
; |
AV |
= BVU·BUV = 1 . |
|
||||||
|
1 |
|
0 |
0 |
0 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||
Усеченные матрицы вероятностей возвращения: A = |
(1); A |
= AV = (1), то есть |
|||||||||||||
|
|
|
|
|
|
|
U |
|
|
|
U |
|
|
|
|
состояние 1 всегда является начальным при возвращении в подмножество U и |
|||||||||||||||
состояние 5 является начальным при возвращении в подмножество V. |
|
||||||||||||||
Предельные распределения вероятностей возвращения: |
r |
|
= ( 1 ); |
r |
|
= ( 1 ). |
|||||||||
Усеченные матрицы относительных частот: |
|
|
|
U |
|
V |
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
λ |
|
λ |
|
|
|
|
|
|
|
|
|
|
N = |
λ γ |
γ |
; |
N |
= N |
V |
= ( 1 ). |
|
|
|
|||||
|
|
|
|
|
|
||||||||||
U |
|
|
1 β |
|
|
|
V |
|
|
|
|
|
|
||
|
λ αγ |
|
1 β |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
89 |
|
|
|
|
|
|
|
|
|
|
|

Матрица средних времен нахождения в состояниях подмножества U при однократном попадании в них:
|
|
|
1/(λ γ) |
0 |
0 |
0 |
|
|
|
|
|
|
0 |
1/γ |
0 |
0 |
|
(t) |
1 |
= |
|
|
||||
U |
= – dgUU |
|
0 |
0 |
1/μп |
0 |
. |
|
|
|
|
|
|
||||
|
|
|
|
0 |
0 |
0 |
1/μ |
|
|
|
|
|
п |
||||
Строка средних времен нахождения в состояниях подмножества U до выхода из этого подмножества:
|
|
|
|
(t) |
|
1 |
|
λ |
|
γ |
|
λ |
|
|
|
|
|
|
|
|
|
||||||
tU =NU |
· U |
= |
|
|
|
|
|
|
|||||
|
1 |
(1 β)γ |
|
μп |
|
|
. |
||||||
|
|
|
|
|
|
λ αγ |
|
|
(1 β)μп |
||||
Для упрощения последующих выкладок будем считать, что среднее время периодической проверки намного меньше среднего времени до отказа и среднего
времени между проверками, то есть μп >> λ, μп >> γ. В модели это выражается в том, что принимается μп = ∞. Тогда строка средних времен нахождения в состояниях примет вид:
|
|
|
|
1 |
|
λ |
|
t |
= |
|
1 |
|
0 0 . |
||
|
|
||||||
|
U |
|
|
|
(1 β)γ |
|
|
|
|
|
|
λ αγ |
|
||
В подмножество U входят состояния, различные по своему функциональному назначению. Так, состояния 1 и 2 характеризуются временем нахождения в них, а состояния 3 и 4 – числом вхождений в эти состояния. Поэтому подмно-
жество U целесообразно описывать векторами nU и tU . Укрупненную систему можно представить двумя состояниями u и v (рис. 8.2) с переходными вероятностями 1 между входными состояниями. Состояние u следует характеризовать
векторами nU и tU .
Приведенные матричные характеристики могут быть использованы для получения обобщенных (выходных) характеристик функционирования устройства. В табл. 8.4 приведен ряд таких характеристик устройства, которые могут быть полезны при исследовании эксплуатации устройства.
На основе приведенной модели может быть исследовано влияние недостоверности контроля на эксплуатационные характеристики устройства. В частности, ошибки контроля I рода не влияют на значения коэффициентов готовности и простоя. В рассматриваемом варианте они влияют на среднее время цикла и коэффициент использования. Однако коэффициенты готовности и простоя существенно зависят от ошибок контроля II рода: при увеличении вероятности ошибки контроля II рода уменьшается коэффициент готовности и увеличивается коэффициент простоя.
90