

28. Способы уменьшения параметров рыскания буксируемого судна.
Для уменьшения рыскливости буксируемого судна увеличивают дифферент на корму и располагают точки крепления буксирного троса как можно дальше вперед от центра тяжести судна. Эти меры основаны на результатах теоретического исследования устойчивости буксируемого судна на курсе.
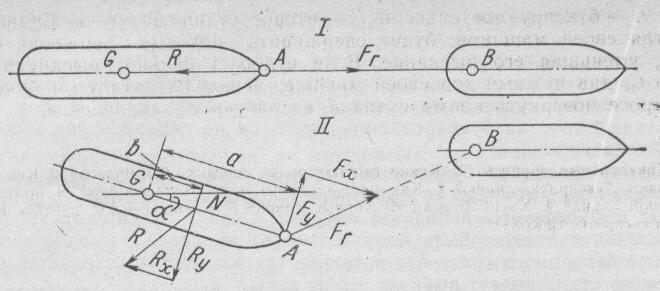
Допустим, судно А буксируется судном В (рис. 7.20). В положении I к судну А приложены сила Рг, равная тяге на гаке буксирующего судна В, и сила Я, равная сопротивлению воды движению судна А. Обе эти силы равны и противоположны по направлению.
В положении II, когда судно А повернулось вокруг оси, проходящей через центр тяжести судна С, на угол а, к нему приложены сила Ft
и равнодействующая гидромеханических сил R при условии отсутствия ветра (это касается и дальнейших рассуждений). Сила Fr может быть разложена на составляющие Fx и Fy, а сила R — на составляющие Rx и Ry. Сила Fy дает момент, стремящийся повернуть судно обратно на курс. Сила Ry дает момент, стремящийся увеличить угол поворота а, т. е. угол рыскания. Момент силы Fy является полезным, и его необходимо увеличить. Для этого точка А, в которой крепится буксир, должна быть расположена как можно дальше от центра тяжести судна, т. е. от точки G. Момент силы Ry — вредный, поэтому его следует уменьшать.
Приближая точку N, в которой приложена сила R, к точке G, уменьшаем плечо Ь, а следовательно, и момент силы Ry. Увеличение дифферента на корму смещает точку N в сторону центра тяжести судна.
Устойчивое движение буксируемого судна на курсе может быть достигнуто созданием за его кормой тормозящего устройства, которое затрудняет рыскание. Эти устройства, как правило, значительно увеличивают сопротивление буксированию, однако иногда без них обойтись нельзя. Подобным тормозящим устройством может быть выпущенная за корму на прочном тросе якорная цепь (1—2 смычки) или стальная грузовая сетка, наполненная кранцами или бухтами старого троса. Какое бы устройство не было применено в каждом конкретном случае, оно должно быть такой массы, чтобы его можно было поднять на палубу подъемными средствами буксируемого судна, если они в исправности, или средствами буксировщика.
На одновинтовом судне застопоренный винт является тормозящим средством, в связи с чем он способствует устойчивости движения судна на буксире. Поэтому гребной винт буксируемого судна следует держать застопоренным, не позволяя ему вращаться, хотя это сильно увеличивает сопротивление буксировке.
29.Относительная прокладка по данным рлс (определение кц, vц, Дкр, Ткр).
Эта прокладка получила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения.
Из точки О, принимаемой за место своего судна, прокладывают наблюденные пеленги П1 и П2 и по ним расстояния Dl и D2 (рис.), Через полученные точки Ах и Аг проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения DKp. Время сближения на кратчайшее расстояние
![]()
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную Vц до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
![]()
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. DKP и tкр, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух перемещений— относительного S0(Vo) и судна-наблюдателя SH (VH): Sц= Sо + Sн или Vц =VО+Vн.
Учитывая коммутативность суммы векторов (Sо + SН = Sн+ So), можно находить SЦ (Vц) двумя способами.
Построение векторного треугольника (см. рис. ), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
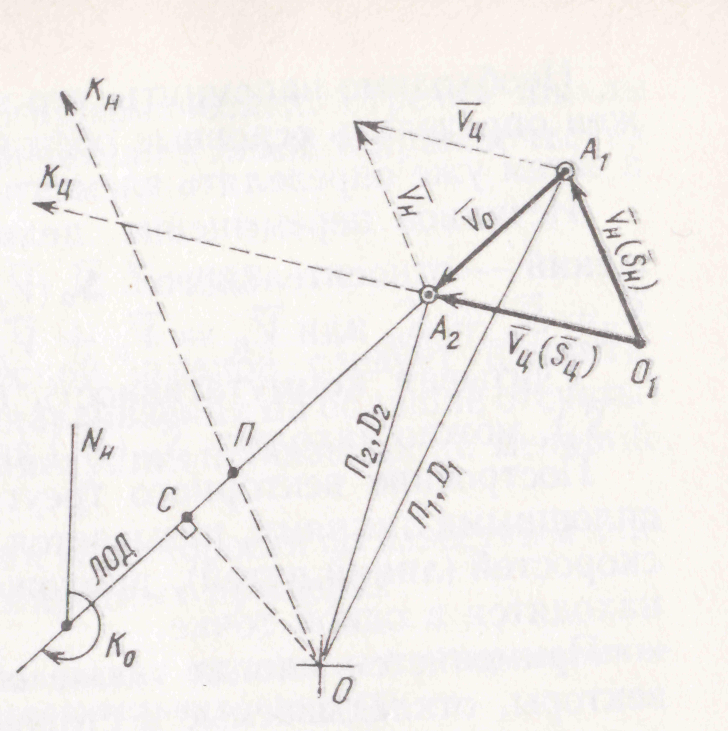
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
В дальнейшем мы будем в основном пользоваться прямым построением, так как оно более удобно при решении задач расхождения.
Длина вектора движения судна-наблюдателя должна быть равна в выбранном масштабе плаванию свои ч> судна за время между наблюдениями, принятыми для построения векторного треугольника. Длина полученного вектора движения цели соответствует плаванию цели за время между наблюдениями.
Относительная прокладка выполняется на радиолокационном маневренном планшете, представляющем собой сетку полярных координат.