

mo-crib-03
.pdfВопрос 20.
Градиентные методы: с постоянным шагом, с дроблением шага.
Градиентный метод с постоянным шагом.
|
(k +1) = |
|
( k ) −αf ′( |
|
|
(k ) ), k = 0,1,2... |
|
|||||||||||||
õ |
õ |
õ |
|
|
||||||||||||||||
|
|
|
|
|
|
∂f ( |
1 |
) |
|
|
|
|
|
|
|
|
|
|
||
x(jk +1) = x(jk ) −α |
|
, j = |
|
|||||||||||||||||
|
|
|
x(k ) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1, n |
|
|||||||||||||||
∂x j |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
f (x) = ax2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x(k +1) = x( k ) − 2αax( k ) = x(k ) (1 − 2αa) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1)0 < α < |
1 |
− метод |
_ сходится |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2)α > |
1 |
|
− метод |
_ расходится |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3)α = |
1 |
− зацикливан ие |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
à |
|
|
|
|
|
|||||
|
|
|
|
|
* |
|
|
x0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
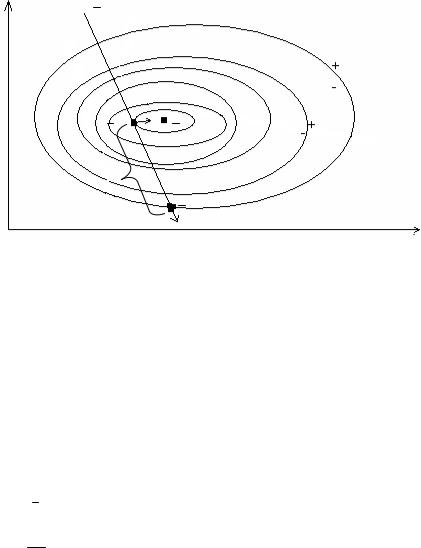
Если выбирать малые α , метод надёжно приводит в точку x* . Иначе метод может заканчиваться неудачно.
Градиентный метод с дроблением шага.
В методе длина шага постепенно уменьшается по мере приближения к точке x* . На каждой итерации шаг выбирается таким образом, чтобы для него выполнялось соотношение:
|
|
|
|
f ′( |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
f ( |
|
(k ) −αk |
|
(k ) |
)) − f ( |
|
(k ) ) ≤ −εαk |
|
|
|
f ( |
|
(k ) ) |
|
|
|
|
|||||||
x |
x |
x |
x |
|||||||||||||||||||||
14243 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
(k ) |
|
|
|
|
′ |
|
(k ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
f (x) = f (x |
|
|
|
|
|
) x |
||||||||||||||||||
|
) + f (x |
|
||||||||||||||||||||||
Выбирается шаг достаточной величины и проверяется выполнение соотношения. Если выполняется – делаем уменьшение. Если нет – дробим шаг, пока соотношение не начинает выполняться.
X2
− f ′(x (1) )
− f ′(x (0) )
|
(2) |
|
(3) |
x |
x |
|
* |
− f ′( |
|
(2) ) |
x |
x |
x (1)
x (0)
X1

x (k +1) = x (k ) − α k f ′(x (k ) ), k = 0,1,2...
Если f (x) такая, что для нее существует постоянная Липшица
(для которой: |
|
|
|
f ( |
|
) − f ( |
|
) |
|
|
|
≤ R |
|
|
|
|
|
− |
|
|
|
|
|
, x, y Ε n ), то α |
|
= α = const = |
1 − ε |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
x |
y |
x |
y |
k |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если для матрицы f ′′(x) вычислять оценки сверху и снизу для наибольшего и
наименьшего собственных чисел такой матрицы, то тогда α k = α − const = 2(1 − ε )
M
21. Метод наискорейшего спуска, метод покоординатного спуска, сходимость градиентных методов.
Метод Коши (наискорейшего спуска)
_ (k +1) |
_ (k ) |
−α |
|
_ ( k ) |
x |
= x |
k |
f | (x ) ; k=0,1,2…. |
|
|
|
|
|
α k выбирается оптимальной величиной, обеспечивающей достижение min функции при
|
|
|
|
|
|
|
|
|
|
|
_ (k ) |
|
_ (k ) |
|
движении в направлении f | (x |
) |
из точки x . |
||||||||||||
α |
|
|
|
|
|
_ ( k ) |
|
_ (k ) |
|
|
||||
k |
= arg_ min_ f x |
|
− αf | (x |
) |
; |
|
||||||||
|
|
|
|
|
α ³0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
_ (k ) |
|
|
_ (k +1) |
|
|
||
Направления |
f | (x |
|
) и |
f | (x |
|
) |
взаимно ортогональные: |
|||||||
ϕ |
(α ) = |
|
_ (k ) |
− αf || |
_ (k ) |
|
|
|
|
|||||
f (x |
(x |
|
)) - направление ее min-ции; |
|||||||||||
|
dϕ |
|
|
_ |
|
_ (k ) |
|
|
_ (k +1) |
|
|
|||
|
|
d x |
|
|
|
|
|
|||||||
|
|
= − f | x |
|
f |
| x |
= 0 |
||||||||
|
|
|
||||||||||||
|
|
_ |
|
dα |
|
|
|
|
|
|
|
|
||
|
d x |
|
|
|
|
|
|
|
|
|
|
|
|
|
Геометрическая интерпретация: X2
− f ′(x (k ) )
x (1) |
x * |
α 0
x (0)
X1
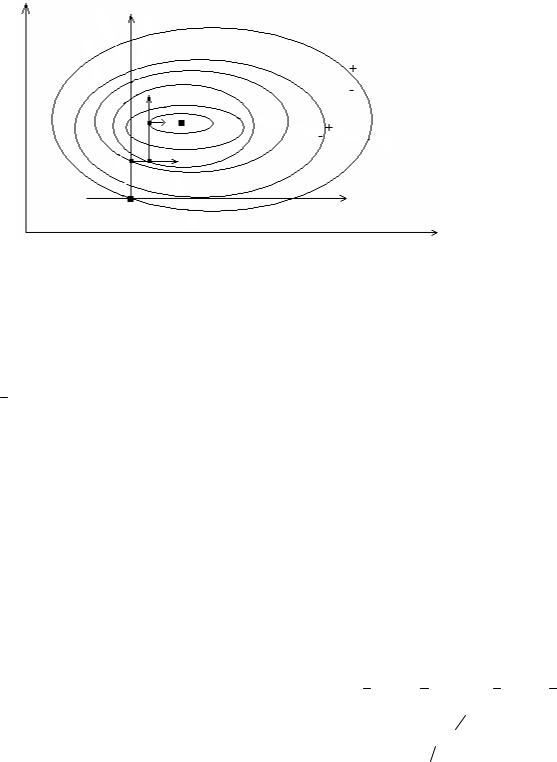
Градиентный метод покоординатного спуска. Движение вдоль какой-либо оси на каждом шаге.
|
|
|
|
|
|
_ (0) |
|
|
|
(0) |
|
(1) |
|
(0) |
∂f (x ) e1 |
|
|
|
|
x ; x = x − α 0 |
|
|
|
||||||
|
_ |
_ |
|
_ |
|
_ |
|
|
|
|
|
|
|
|
|
∂x1 |
|
|
|
|
|
|
|
|
|
_ (1) |
|
|
|
|
_ (1) |
|
(2) |
|
(1) |
|
|
|
|
_ |
_ |
_ |
|
|
|
||||
x ; x |
|
= x |
− α1 |
∂f (x ) e2 |
|
|
|
||
|
|
|
|
|
|
∂x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
_ (kn+s-1) |
|
|
_ (kn+s -1) |
_ ( kn+s ) _ ( kn+s-1) |
∂f (x |
_ |
||||||
x |
|
; x |
= x |
− α kn+s-1 |
) |
es |
|||
|
∂xs |
|
|||||||
|
|
|
|
|
|
|
|
|
|
Где ei - столбец с нулями на всех местах кроме
k = 0,1,2....
k – число внешних итераций;
s = 1, n
- спуск по всем направлениям;
i-ого, на нем 1.
x(kn+s ) |
= x( kn+s-1) |
; __ j = |
1; n |
; __ j ¹ s; |
|||||||
|
j |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kn+s-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(kn+s ) |
= x( kn+s-1) |
- α |
|
|
¶f (x |
) |
; __ j = s; |
||||
kn+s -1 |
|
|
¶xs |
|
|||||||
|
j |
j |
|
|
|
|
|
||||
Если αkn+s-1 =const, то имеем постоянный шаг;
Если α выбирается оптимальной длинной, то имеем покоординатный спуск, называемый
методом Гаусса – Зейделя.
|
|
|
|
|
|
(kn+s -1) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
α kn+s-1 |
= arg_ min_ f |
|
(kn+s-1) |
- α |
¶f (x |
) |
* |
|
s |
|
; |
||||
x |
e |
||||||||||||||
|
|
¶xs |
|
||||||||||||
|
α ³0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Геометрическая интерпретация: X2
|
|
|
|
|
|
(3) |
|
|
|
|
* |
|
|
|
|
|
x |
x |
|||||
|
|
|
(1) |
|
|
(2) |
|||||
x |
x |
||||||||||
|
|
|
(0) |
|
|
|
|
|
|||
|
|
x |
|
|
|
|
|
||||
X1
Теоремы о сходимости градиентных методов:
1. Если f(x) ограниченно снизу и ее градиент удовлетворяет условию Липшица, т.е.
выполняется соотношение: || f | ( |
|
y |
) - f | (x) ||£ R || |
y |
- |
x |
|| , |
|
" |
x |
, |
|
y |
|
Î E n ; y ¹ x; |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
(k +1) = |
|
|
|
(k ) - α k |
f | ( |
|
|
(k ) ) ; k=0,1,2… |
|
|
. Где α k удовлетворяет соотношению из градиентного |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
x |
x |
x |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
метода с дроблением шага: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
f (x |
( k ) - α k f | ( |
|
|
|
(k ) ))- f ( |
|
|
(k ) ) £ -ξα k || f | ( |
|
(k ) ) ||2 ;α k > 0; __ 0 < ξ < 1; |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
x |
x |
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
То тогда справедливо, что || |
f | ( |
|
|
(k ) ) ||® 0, при _ k ® ¥, _ для _ " |
|
|
(0) ; |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
x |
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( k ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Условие остановки: |
|
¶f (x ) |
|
£ ξ ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¶x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2. Если f(x) является непрерывно дважды деференцируемой функцией, для которой |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||£ |
|
T |
f | ( |
|
) |
|
£ M || |
|
|
2 |
|| ; " |
|
|
, |
|
|
Î E n ; y ¹ x; |
||||||||||||||||||||||||||||||||||||||
выполняется соотношение : |
m || y |
y |
x |
y |
x |
x |
y |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
то она называется сильно выпуклой функцией. Тогда для процесса |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(k +1) £ |
|
|
(k ) - α k f | ( |
|
(k ) ) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
x |
x |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
_ ( k ) |
|
|
|
|
|
_ (k ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(0) |
|
|
выполняется соотношение: |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
α k = arg_ min_ f x |
- αf | (x |
|
) |
, то для начальной точки x |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
α ³0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
(k ) ® |
|
(*) ; f ( |
|
(k ) ) ® f ( |
|
(*) ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
x |
x |
x |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (x |
( k ) )- f (x |
* )£ g k (f (x |
(0) )- f (x |
* )) |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
||
Для скорости сходимости справедливы зависимости: || x(k ) - x* |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
||£ Cg 2 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g = (M - m) (M + m); _ g Î [0;1] |
|||||||||||||||||||||||
C = const < ¥

M и m: равномерные по х оценки сверху и снизу, наибольшее и наименьшее собственные
числа матрицы f || (x) . В качестве приближения можно взять собственные числа f || (x ) .

22. Градиентный метод с масштабированием переменных.
n
(Для f вида f = ∑ α k x 2j , сепарабельных функций)
j =1
В случае когда g<<1 задача является хорошо обусловленной и решается достаточно быстро. А если M и m сильно отличаются друг от друга и g≈1, то задача является плохо обусловленной и требует большого числа итераций.
На примере:
|
|
|
|
|
|
|
|
|
|
|
(0) |
|
2 |
|
|
|
2 |
|||
f (x) = x 2 |
+ 16x 2 → min |
|
|
x |
= |
|
|
H = |
|
|
||||||||||
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
= α − 12 y |
|
|
|
|
|
2 |
|
|
|
0 |
|||
|
|
= α 12 x |
|
|
|
|
; j = |
|
x |
|
= μ |
|
|
|
|
|||||
y |
i |
j |
; x |
i |
j |
1, n |
i |
j |
y |
j |
; |
|||||||||
|
|
j |
|
j |
|
|
|
|
|
|
|
|
|
|||||||
f ( |
|
) = y 2 |
|
+ y 2 |
→ min |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0
тогда выполняют замену переменных:
32
μ j = α −j 12
|
f |
|
|
|
|
|
2x |
|
|
|
|
|
|
|
|
|
(0) |
|
4 |
|
|
(0) |
= |
2 |
|
|
|
|
(0) |
4 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
||||||||||||||||||||||||
|
| (x) = |
|
1 |
|
|
|
|
|
|
f | (x ) |
= |
|
|
|
|
|
|
f | ( y |
) = |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32x2 |
|
|
|
|
|
|
|
|
|
|
|
64 |
|
|
|
|
8 |
|
|
|
|
|
16 |
|
|||||
Для более сложных функций, компоненты μ j |
пересчитываются на каждом шаге , по |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
2 |
~ |
|
|
− 12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (x ) |
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
формуле μ |
i |
= |
|
|
|
|
|
|
|
|
|
;i |
= 1, n , где |
x |
- |
точка одномерного min-ма функции, при |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂xi ∂xi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(k ) |
в направлении переменной xi . |
|
|
|||||||||||||||||||||
движении из x |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
(k +1) |
|
|
|
(k ) |
− α |
|
|
|
|
|
|
|
|
(k ) |
|
|
|
μ 2 |
|
0 |
|
|
|
1 0 |
|
|
||||||||
|
x |
= x |
|
B |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
k |
k |
f | (x ) |
B = |
1 |
|
|
= |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μ2 |
|
|
|
0 16 |
|
|
|||||
23. Эвристические схемы градиентных методов.
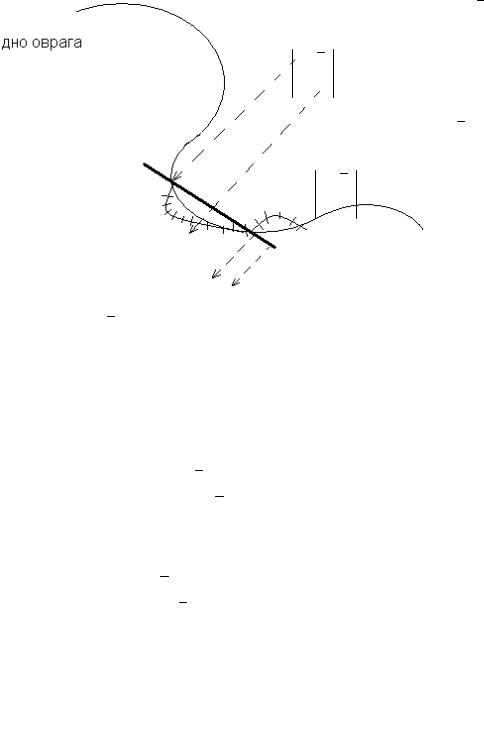
Эвристический метод с переключающимся алгоритмом.
Применяется для функций со сложной топографий линий уровня. Состоит из 2 процедур:
1. Принимаем некоторое ξ1 << 1 и затем принудительно полагаем ¶f (x) = 0 , x j такие, что
¶x j
действительно выполняется соотношение ¶f (x) £ ξ1 . Движение осуществляется ко дну
¶x j
оврага, в сторону сильно уменьшающихся значений функции.
2. Устанавливаем некоторое ξ2 >> 1, принудительно полагаем ¶f (x) = 0 , для которых в
¶x j
действительности выполняется соотношение ¶f (x) ³ ξ2 , в результате будим двигаться в
¶x j
направлении вдоль оврагов. На практике такие процедуры чередуют.
x
Метод Гельфанда ( обладает линейной скоростью сходимостью)
(01)
x
(02)
x
(1,1)
x
(2,2)
x
24. Оптимизация многомерных функций методами второго порядка.
В методах второго порядка производиться квадратичная аппроксимация. Практически за один шаг обрабатывают любую квадратичную функцию. Для более сложных больше.
Метод Ньютона:
_ (k +1) |
_ |
(k ) |
_ (k ) |
_ (k ) |
x |
= x |
|
− ( f || (x ))−1 f | (x ) |
|
Квадратичная скорость сходимости.
Метод Ньютона – Фафстона ( модифицированный метод Ньютона с регулированием шага)
_ ( k +1) |
_ (k ) |
|
|
_ (k ) −1 |
|
|
_ ( k ) |
|
|
|
|
|| |
|
|
| |
|
|
x |
= x − α k f |
(x ) |
f |
(x ) ; |
||||
|
|
|||||||
|
|
|
|
|
|
|
|
|
α |
|
|
|
_ (k ) |
|
_ (k ) |
|
_ (k ) |
|
|
k |
= arg_ min_ f x |
− α f || (x |
) |
−1 f | (x ) |
; |
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
_ (k +1) |
) ≤ |
_ (k ) |
|
|
|
|
|
|
f (x |
f (x ) ; |
|
|
|
|
|
|
|||
Релаксационная последовательность.
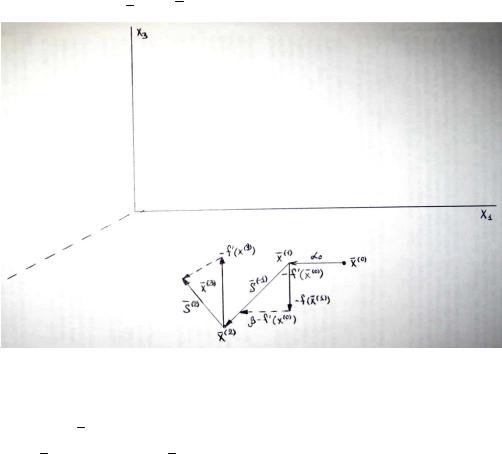
25. Метод сопряженных градиентов.
Метод Флетчера-Ривса
|
|
|
|
|
(k +1) = |
|
|
(k ) + α |
|
|
|
|
|
|
(k ) , k = 0,1,2... |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
x |
x |
k |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
(0) = − f ′( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
(0) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
( k ) = − f ′( |
|
|
(k ) ) + β |
|
|
|
|
|
( k -1) |
? k = 1,2,... |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
S |
|
S |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
x |
k -1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Направления S были взаимносопряженными. |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
( k ) , |
|
|
(k -1) ; f ( |
|
) = a + ( |
|
|
|
|
) + |
1 |
( |
|
|
|
|
|
) → min |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
S |
S |
|
b |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
x |
x |
x |
, Hx |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
(k -1) ) = 0; = −( f ′( |
|
|
|
|
(k -1) ) + β |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
S |
(k ) ; HS |
(k ) ), HS |
|
(S (k -1) |
, HS (k -1) ); |
||||||||||||||||||||||||||||||||||||||||||||||||||||
x |
k -1 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
= ( f ′( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
( k -1) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
β |
|
|
|
|
|
(k ) , HS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
k -1 |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
(S (k -1) , HS (k |
-1) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Длину шага выбирают оптимальной и для любой квадратичной функции:
|
|
= |
f |
′ |
( |
|
(k ) , |
|
(k ) ) |
|
||
|
|
|
S |
|
||||||||
α |
|
x |
; |
|||||||||
k |
|
|
|
|
|
|
|
|
||||
(S (k ) , HS ( k ) ) |
||||||||||||
|
|
|
||||||||||
|
|
|
|
|||||||||
Для более сложных функций: α k = arg minα ³0 f (x (k ) + αS (k ) );
|
|
|
|
|
|
( k -1) , f ′(k ) , β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
S |
k -1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
(k +1) = |
|
( k ) + α k |
|
(k ) H |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
S |
|
|
|
|
|
|||||||||||||||||||||||||||||||
x |
x |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
(k +1) = Hx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
(k ) + α k HS |
( k ) |
|
|
|
|
|
|||||||||||||||||||||||||||
|
Hx |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
+ Hx |
(k +1) |
= |
|
|
|
|
|
|
+ Hx |
(k ) |
+ α |
|
|
|
(k ) |
||||||||||||||||||||||||
|
b |
|
|
|
|
|
b |
k |
HS |
||||||||||||||||||||||||||||||||
14243 |
|
|
|
|
|
|
14243 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
f ¢( |
|
( k +1) ) |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
x |
|
|
|
|
( k ) |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
f ¢( x |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)® f ( x )=a+( x ,b )+ |
|
( x ,Hx ) |
|
|
|
|
|
||||||||||||||||
2
α |
|
|
|
|
(k ) = f ( |
|
(k +1) ) − f ( |
|
(k ) ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
HS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
k |
x |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
α |
|
|
|
|
|
|
( k -1) |
= f ′( |
|
( k ) ) − f ′( |
|
|
(k -1) ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
HS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
k |
-1 |
x |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
= ( f ′( |
|
|
|
|
|
|
|
|
(k -1) ) = ( f ′( |
|
|
|
( k ) ), f ′( |
|
|
|
(k ) ) − ( f ′( |
|
(k ) ), f ′( |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(k -1) )) = |
||||||||||||||||||||||||||||||||||||||||||||||
β |
|
|
|
|
|
( k ) ), HS |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
k |
-1 |
|
x |
x |
x |
x |
x |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
(S (k -1) , HS ( k -1) ) |
(S (k -1) , f (x (k ) ) − (S (k -1) , f ′(x (k -1) )) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( f ′( |
|
(k ) ), f ′( |
|
(k ) )) |
|
|
|
|
|
|
|
|
|
|
|
( f ′( |
|
(k ) ), f ′( |
|
(k ) )) |
|||||||||||||||||||||||||||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
x |
|
|
|
|
|
|
|
|
= |
|
x |
x |
|||||||||||||||||||||||||||||||||||
− (− f ′( |
|
|
|
(k -1) ), f ′( |
|
|
(k -1) ) − β |
|
|
|
( |
|
(k -1) |
, |
|
|
|
( k -2) ) |
( f ′( |
|
(k -1) ), f ′( |
|
(k -1) )) |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
S |
S |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
x |
x |
k -2 |
x |
x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Алгоритм:
1.Задаем x (0) , S (0) = − f ′(x (0) )
2.k-ый шаг. Попадаем первый раз с параметрами . Вычисляем оптимальную длину шага. α k = arg min λ ³0 f (x (k ) + αS (k ) );
x (k +1) = x (k ) + α k S (k )
3.Осуществляем проверку. Вычисляем:
f (x (k +1) )
f ′(x (k +1) )
Проводим проверку на остановку алгоритма. Если || f ′(x (k +1) ) ||≤ ε → останавливаем алгоритм.
x (k +1) − приближение_ к _ x *
4.Вычисляем коэффициент
|
|
= |
( f ′( |
|
( k +1) ), f ′( |
|
(k +1) )) |
||
β |
|
x |
x |
||||||
k |
|
|
|
|
|
|
|
||
|
|
( f ′( x (k ) ), f ′( x (k ) )) |
|||||||
|
|
|
|||||||
Вычисляем S ( k +1) = − f ′(x (k +1) ) + β k S (k ) и переходим к п.2 алгоритма.
Для любой квадратичной функции дает гарантированное решение за n шагов(суперлинейная сходимость). Алгоритм первого порядка, т.к. нет вторых производных.
Для более сложных функций после каждой n итерации работу алгоритма нужно повторять в кол-ве x (0) для нового повторения брать последнюю точку из пред. работы алгоритма.