

Сканирующая туннельная микроскопия.
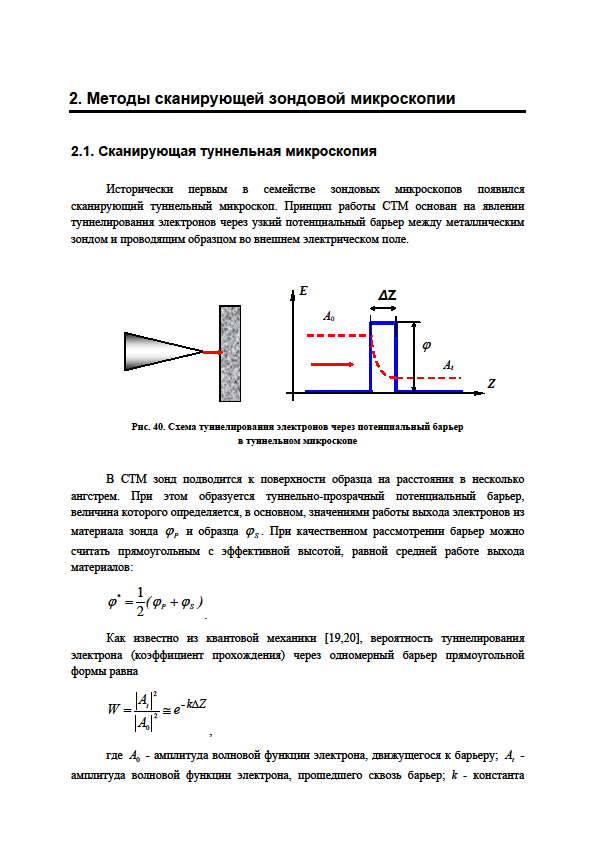
Исторически первым в семействе зондовых микроскопов появился сканирующий туннельный микроскоп. Принцип работы СТМ основан на явлении туннелирования электронов через узкий потенциальный барьер между металлическим зондом и проводящим образцом во внешнем электрическом поле.
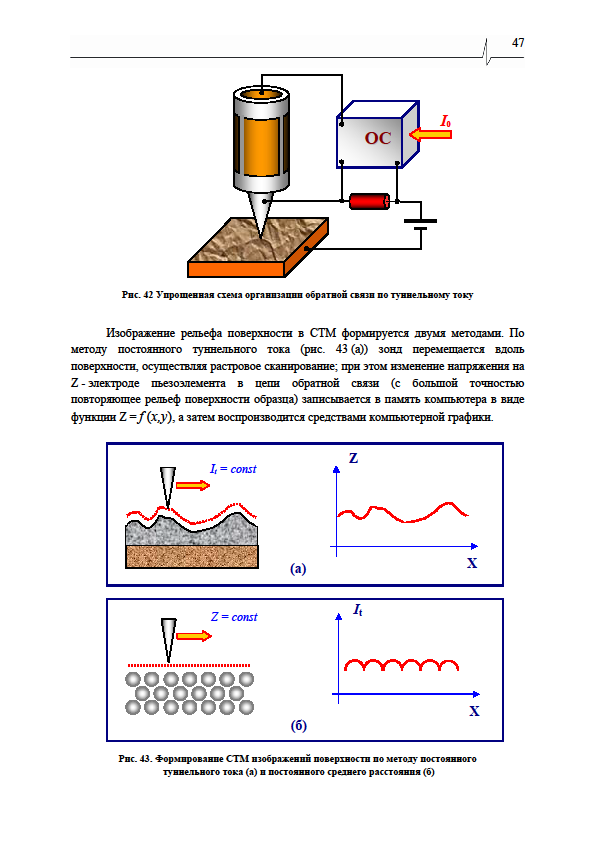
Изображение рельефа поверхности в СТМ формируется двумя методами. По методу постоянного туннельного тока зонд перемещается вдоль поверхности, осуществляя растровое сканирование; при этом изменение напряжения на Z – электроде пьезоэлемента в цепи обратной связи (с большой точностью повторяющее рельеф поверхности образца) записывается в память компьютера в виде функции Z= f (x,y), а затем воспроизводится средствами компьютерной графики.
При исследовании атомарно гладких поверхностей часто более эффективным оказывается получение СТМ изображения поверхности по методу постоянной высоты
Z = const. В этом случае зонд перемещается над поверхностью на расстояниинескольких ангстрем, при этом изменения туннельного тока регистрируются в качестве СТМ изображения поверхности (рис. 43 (б)). Сканирование производится либо при отключенной ОС, либо со скоростями, превышающими скорость реакции ОС, так что ОС отрабатывает только плавные изменения рельефа поверхности. В данном способе реализуются очень высокие скорости сканирования и высокая частота получения СТМ изображений, что позволяет вести наблюдение за изменениями, происходящими на поверхности, практически в реальном времени.
Существенным недостатком всех методов СТМ является ограничение по материалам, пригодным для исследования: они должны быть электропроводящими, так как между зондом и образцом должен протекать ток. Поэтому туннельная микроскопия может быть применена только для ииследования металлов, сплавов, сверхпроводников и полупроводников.
Атомно-силовая микроскопия.
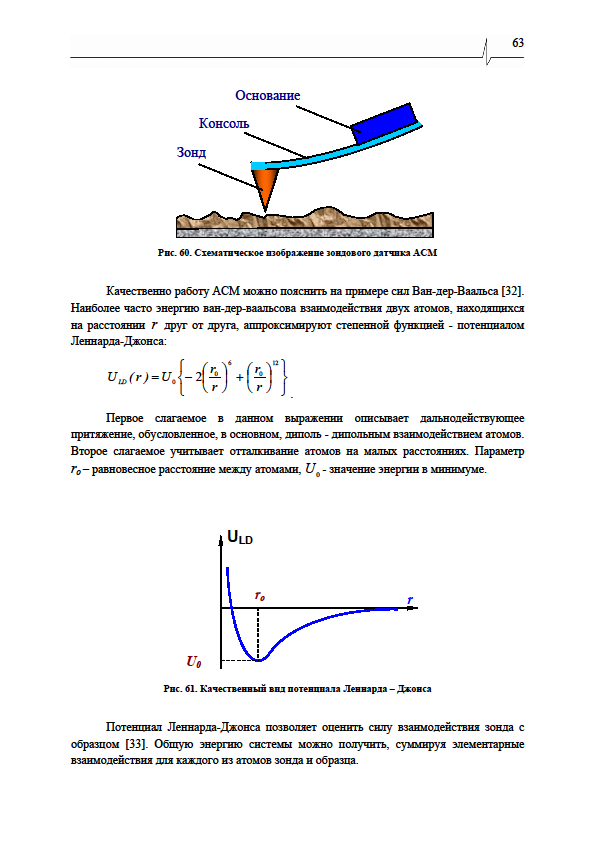
Атомно-силовой микроскоп (АСМ) был изобретён в 1986 году Гердом Биннигом, Кэлвином Куэйтом и Кристофером Гербером [31]. В основе работы АСМ лежит силовое взаимодействие между зондом и поверхностью, для регистрации которого используются специальные зондовые датчики, представляющие собой упругую консоль с острым зондом на конце (рис. 60). Сила, действующая на зонд со стороны поверхности, приводит к изгибу консоли. Регистрируя величину изгиба, можно контролировать силу взаимодействия зонда с поверхностью.
При этом могут быть использованы как нормальная так и тангенциальная (латеральна) состовляющая силы взаимодействия зонда с поверхностью. Независимо от природы этих сил (например это может быть ванн-дер-ваальсово взаимодействие) имеется две области – притяжения (на большом расстоянии от поверхности) и отталкивания ( на малом). Обе они могут быть применимы в различных модах АСМ (контактных, бесконтаных и промежуточных – полуконтактных или квазиконтактных).
Получение АСМ изображений рельефа поверхности связано с регистрацией малых изгибов упругой консоли зондового датчика. В атомно-силовой микроскопии для этой цели широко используются оптические методы.
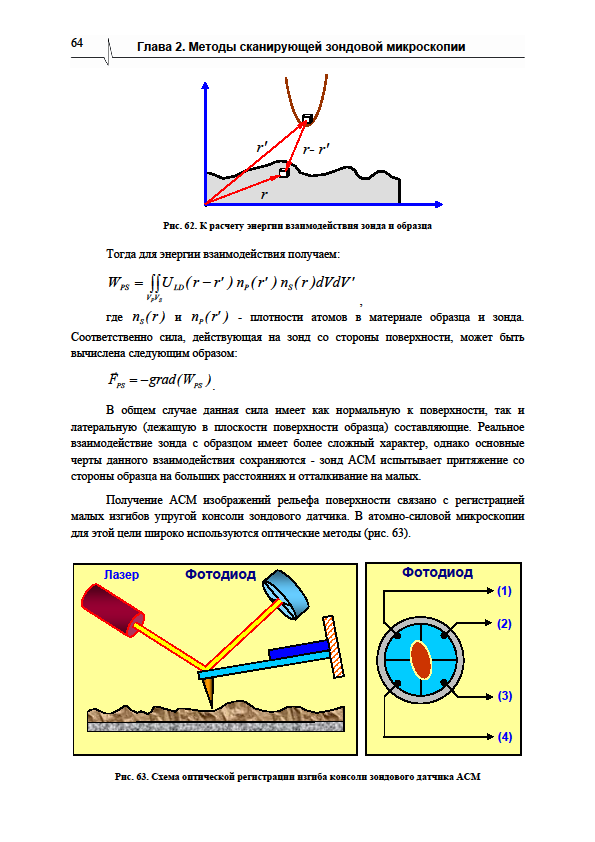
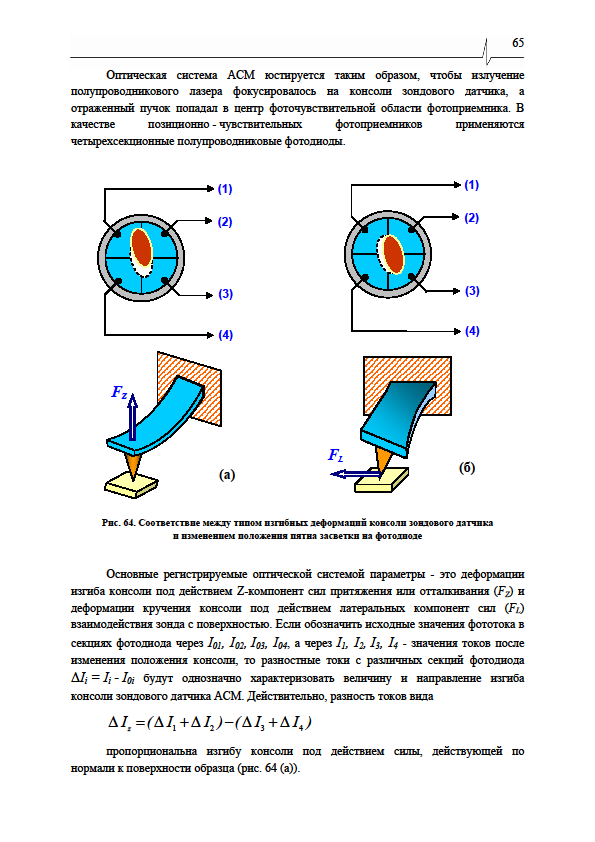
Оптическая система АСМ юстируется таким образом, чтобы излучение полупроводникового лазера фокусировалось на консоли зондового датчика, а отраженный пучок попадал в центр фоточувствительной области фотоприемника. В качестве позиционно - чувствительных фотоприемников применяются четырехсекционные полупроводниковые фотодиоды.
Помимо микротопологии поверхности контактные моды позволяют получать дополнительно к геометрическим характеристикам и физические – о величине локальной жесткости, адгезии, силах трения и. т.п.
Значительно расширяет возможности силовой зондовой микроскопии применение режимов, в которых зонд приводится в непрерывное колебательное движение на собственной частоте кантилевера. Это так называемые динамические моды АСМ. Параметры вынужденных колебаний (амплитудаБ резонансная частота, сдвиг фазы между возбуждающей колебания силой и смещением зонда) зависят от расстояния между кончиком зонда и поверхностью. Это и положено в основу различных способов зондирования.
В бесконтактном режиме при сближении зонда с поверхностью на него начинает действовать дополнительная сила притяжения. Наличие градиента силы притяжения приводит к изменению эффективной жесткости осциллятора, в результате резонансная частота меняется, а амплитудно-частотная характеристика (АЧХ) и фазово-частотная характеристика (ФЧХ) становятся зависимыми от расстояния между зондом и поверхностью. Бесконтактный режим осуществляют при малых амплитудах возбуждения ( около 1 нм.) и высокой чувствительности датчика смещения кантилевера. Он опрадан при работе с очень мягкими материалами (например биологическими). В физическом материаловедении чаще используют квазиконтактный режим. Амплитуда колебаний кантилевера при этом гораздо больше и при максимальном отклонении в сторону образца зонд слегка касается поверхности, причем при этом происходит смена направления градиента силы (возникает сила отталктвания) В результате АЧХ и ФЧХ датчика претерпевают изменения, что и служит источником информации о поверхнгости. Цепи обратной связи поддерживают среднее расстояние между зондом и поверхностью при сканировании (а следовательно и максимальное усилие в контакте) при постоянном уровне, поэтому и в ФЧХ и ФЧХ содержится информация о вязкоупругих свойствах каждой точки поверхности.
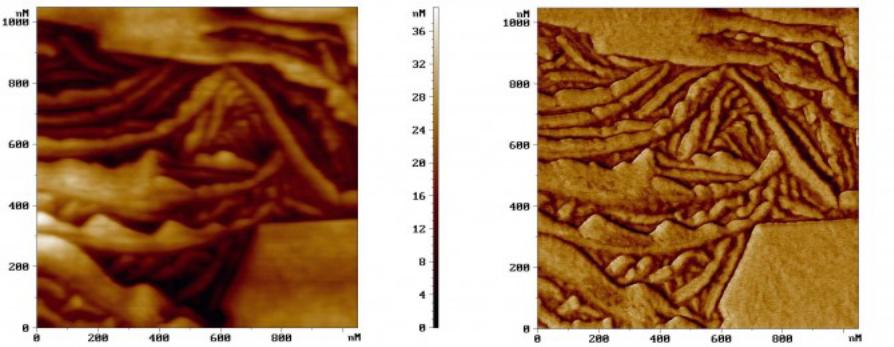
Рис. АСМ изображение учпастка поверхности пленки полиэтилена, полученные в «полуконтактном» режиме: 9а) рельеф поверхности, полученный в режиме постоянной амплитуды; (б) соответствующее распределение фзового контраста.