

Идентификация по апериодической переходной функции с точкой перегиба звена первого порядка с запаздыванием
В некоторых случаях (например, при ориентировочных расчетах) можно h(t) апериодического звена второго или большего порядка аппроксимировать передаточной функцией вида:
![]()
Проводя касательную в точке перегиба, как показано на рис. 26, в первом (грубом) приближении можно принять = Ta; T = Tb (см. кривую 1 на рис. 28).
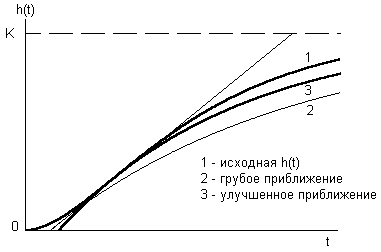
Рис. 28. Аппроксимация с чистым запаздыванием
Более подходящие значения и Т могут быть найдены, если потребовать, чтобы аппроксимирующая ha(t) проходила через точку перегиба и чтобы касательная для h(t) в точке перегиба была бы также касательной и для ha(t). [См. ТАУ, часть 1, под ред. А.В.Нетушила, 1976, стр.263-264]
При t > :
![]() Положим
Положим
![]()
тогда будем иметь систему уравнений:
![]()
Решение системы:
![]()
Метод кратных корней
Определение постоянной времени Т и кратности n для модели системы в виде
![]()
можно выполнить с использованием информации о всей кривой переходного процесса h(t).
Метод использует вычисление площади, заключенной между уровнем установившегося значения К и кривой h(t):
![]()

Рис. 29. Площадь S.
Поскольку теоретически для искомой модели переходная функция h(t) описывается выражением:
 то
то
![]()
В последнем выражении находим табличный интеграл:
![]()
После подстановки табличного интеграла получаем:
S = K T n
Алгоритм вычисления T и n по экспериментальной
кривой
![]() может быть следующим:
может быть следующим:
1. По экспериментальной кривой или по статической характеристике оценивается величина К.
2. Каким-либо подходящим методом численного интегрирования вычисляется площадь
3. Для последовательных значений n = 1, 2,
3 ... вычисляют соответствующие значения
![]() по формуле
по формуле
![]()
4. Для каждой пары значений n и T можно вычислить затем h(t) и оценить тем или иным способом разность h(t) , например:
5. В качестве результата выбирается та пара n и T, которой соответствует минимум .
Метод площадей
Метод ориентирован на вычисление коэффициентов характеристического уравнения для модели
![]() (*)
(*)
Получение формул для вычисления коэффициентов Ai начнем с рассмотрения преобразования Лапласа:
![]()
С другой стороны:
![]()
Обозначим 1 - h(t)/K = x, тогда, учитывая, что
![]()
![]()
![]()
где
![]()
Приравнивая результаты, получаем тождество:

Приводя к общему знаменателю и приравнивая коэффициенты при равных степенях s, получаем:
A1 = M0
A2 = M1 + A1M0
A3 = M2 + A1M1 + A2M0
A4 = M3 + A1M2 + A2M1 + A3M0
An = Mn1 + A1Mn2 + … + An2M1 + An1M0; n = 2, 3, …
Вычисляя по экспериментальной h(t) приближенные значения Mi, по полученным формулам можно последовательно вычислить Ai. Первые n уравнений в приведенной системе всегда имеют n неизвестных коэффициентов Ai.
Если подставить в последнюю формулу выражение для Mi, то можно получить формулу для вычисления Ai в виде:
![]()
![]()
Эта формула позволяет вычислять Ai по выражениям (см. лаб. раб.):
![]()
![]()
![]()
![]()
. . . . . . . . . . . . . . . . . . . . . . . .
![]()