

2.4 Ввод/вывод аналоговых сигналов
Во многих случаях микропроцессорные системы должны обрабатывать не только цифровые, но и аналоговые сигналы. В первую очередь это связано с тем, что большинство физических параметров, обрабатываемых измерительными преобразователями, имеет непрерывный (аналоговый) характер изменения. Отличительная особенность многих современных МК – интегрированный на кристалл МК модуль многоканального аналого-цифрового преобразователя (АЦП). Модуль АЦП предназначен для ввода в МК аналоговых сигналов с датчиков физических величин и преобразования этих сигналов в двоичный код с целью последующей программной обработки.
Для подключения одного из источников аналоговых сигналов (РТх0...РТх7; обычно порт А) ко входу АЦП служит многоканальный аналоговый коммутатор. Выбор источника сигнала для измерения осуществляется записью номера канала коммутатора в регистр управления АЦП. В модулях АЦП предусмотрена только программная установка номера канала, режим автоматического последовательного сканирования каналов с записью результата в индивидуальную ячейку памяти не реализуется.
Диапазон измеряемых значений напряжения аналоговых входов определяется величиной опорного напряжения UREF. Разрешающая способность АЦП составляет UREF/2n, где n – число двоичных разрядов в слове результата. Максимальное значение опорного напряжения равно напряжению питания МК. Обычно два вывода модуля АЦП используются для задания диапазона опорного напряжения: – верхнего и нижнего пределов. Собственно аналого-цифровой преобразователь чаще всего выполнен по способу последовательного приближения. В случае, если требуется повышенная точность преобразования при малых аппаратных затратах, но при большом допустимом времени преобразования – используется АЦП двойного интегрирования. В специализированных МК с высоким значением потока входных аналоговых данных применяется АЦП параллельного типа (считывания).
Обычно в МК число каналов преобразования – от 4 до 12, время преобразования – от1 до 30 мкс (при использовании АЦП поразрядного уравновешивания) при разрядности АЦП – 10…12.
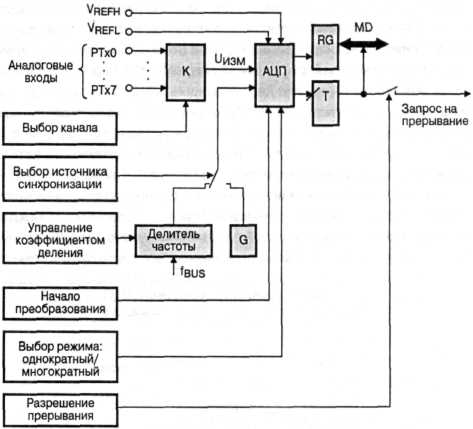
Структурная схема типового модуля ацп
В некоторых МК для реализации функций аналого- цифрового преобразования используется встроенный компаратор. При этом опорные напряжения часто формируются внутренним резистивным делителем и аналоговым мультиплексором, который производит выбор требуемого значения опорного напряжения. Программно может производиться последовательный перебор значений опорных напряжений. Код опорного напряжения, при котором происходит переключение компаратора, соответствует величине входного напряжения.
Модули цифро- аналоговых преобразователей (ЦАП) в микроконтроллерах встречаются реже, чем модули АЦП. Наиболее часто функция цифро- аналогового преобразователя реализуется средствами программируемого таймера в режиме ШИМ.
Цап на основе таймера в режиме шим
2.5 Контроллеры последовательного ввода/вывода
Только самые простые маловыводные МК не имеют портов последовательного обмена. Обычно МК содержат от 1 до 3 контроллеров последовательного ввода/ вывода. Задачи, решаемые средствами модуля контроллера последовательного ввода/вывода, могут быть разделены на три группы:
Связь встраиваемой МП- системы с системой управления верхнего уровня – компьютером или программируемым контроллером. Наиболее часто для этих целей используются интерфейсы RS-232C и RS-485.
Связь с внешними по отношению к МК периферийными ИС встраиваемой МП- системы, а также с датчиками физических величин с последовательным выходом. Для этих целей используются интерфейсы SPI, I2C, а также нестандартные протоколы обмена.
Интерфейс связи с локальной сетью в мультимикропроцессорных системах. В системах с малым числом МК (до пяти) используют сети на основе интерфейсов I2C, SPI, 1- Wire, RS-485 с собственными сетевыми протоколами. В более сложных системах все более популярным становится протокол CAN.
С точки зрения инженера- схемотехника эти интерфейсы последовательной связи отличаются режимом передачи данных (синхронный или асинхронный), форматом кадра (число бит в посылке при передаче байта полезной информации) и диаграммами сигналов на линиях (уровни сигналов и положение фронтов при переключениях). Напротив, число линий, по которым происходит передача в последовательном коде, обычно равно двум (I2C, RS-232C, RS-485) или трем (SPI). Последнее позволяет проектировать модули контроллеров последовательного обмена таким образом, чтобы с их помощью на аппаратном уровне можно было бы реализовать несколько типов последовательных интерфейсов. При этом физические уровни сигналов, характерные для каждого типа интерфейса, получают с помощью специальных ИС – приемопередатчиков, конверторов, трансиверов.