

2 Архитектура 8- разрядных микроконтроллеров.
2.1 Последовательные интерфейсы микропроцессорных систем
Встроенные в МК модули последовательных приемопередатчиков используются для реализации интерфейсов периферийных устройств, приборных интерфейсов и интерфейсов локальных вычислительных сетей. Понятие "интерфейс" пришло в область систем управления из вычислительной техники, поэтому определения различных типов интерфейсов МП- систем также даются в применении к ЭВМ.
Интерфейс периферийных устройств служит для подключения к системному интерфейсу МПС различных по принципу действия и скорости периферийных устройств, каждое из которых имеет специфичный приборный интерфейс. Примеры параллельных интерфейсов периферийных устройств: Centronics, IEEE-488. Наиболее распространенные последовательные интерфейсы периферийных устройств RS-232C, RS-422A, RS-485, USB.
Под приборным интерфейсом понимают совокупность неунифицированных сигналов и линий связи, которая обеспечивает обмен информацией и управление некоторым конкретным прибором. Функциональное назначение интерфейса периферийных устройств и приборного интерфейса одно и то же: связь ЭВМ с объектом управления. Но в первом случае эта связь осуществляется на основе стандартного решения, а во втором – произвольно выбранного разработчиком, оптимизированного для конкретного применения.
Применительно к МП- системам интерфейс периферийных устройств выступает в двух ролях. Первая – МК входит в состав системы управления периферийным устройством. В этом случае МК собственно выполняет функцию преобразования потока данных в стандарте какого-либо периферийного интерфейса к неунифицированным сигналам приборного интерфейса. Примером может служить клавиатура и "мышка" персональных компьютеров. Однако такие системы не ограничиваются компьютерной периферией. Современные средства измерения предусматривают возможность связи с компьютером. Причем МК, который обеспечивает обмен по последовательному каналу, не обязательно должен выполнять функции управления измерительным прибором. Двухсторонний обмен информацией с персональным компьютером по последовательному интерфейсу (постоянному или коммутируемому) – типовая функция МК встраиваемой МП- системы управления.
Вторая функция интерфейса периферийных устройств – связь МК с другими ИС микропроцессорной системы.
Одним из определяющих этапов начальной стадии проектирования МП- системы является выбор стандарта связи, позволяющего оптимально решить задачи контроля и управления путем установления режима гибкого обмена информацией между функциональными блоками системы. Основой большинства МП- систем является шинная топология. Прием и передача информации осуществляется по одним и тем же линиям связи, являющимися общими для всех абонентов системы, эти линии и представляют собственную шину данных системы. Отдельно взятое устройство взаимодействует с шиной данных посредством подключения выводов своего последовательного интерфейса к соответствующим линиям шины.
Для повышения эффективности процесса передачи данных используется метод программной адресации узлов. Любое сообщение, передаваемое по шине, имеет определяющий его содержание идентификатор или адрес, который включается в первое поле формата сообщения. Узлы, получившие идентификатор, сравнивают его значение со значением собственного внутреннего адреса и таблицей идентификаторов. Узел, которому было адресовано соответствующее послание (значения переданного и собственного адресов совпали), продолжает обмен данными. Остальные устройства системы устанавливаются в режим ожидания, не реагируя на передаваемые данные.
Часто в МП- системах применяется одно главное устройство (MASTER) и совокупность подчиненных (SLAVE). Инициализация и управление передачей данных осуществляется главным (ведущим) устройством. Передача данных от SLAVE к MASTER может быть осуществлена по требованию ведущего посылкой соответствующего кода в первом кадре сообщения ведущего. В каждом цикле связи в любой момент времени могут принимать участие только два узла из входящих в сеть: MASTER и выбранный им SLAVE. Рассмотренная категория сетей характерна для интерфейсов, работающих в режиме синхронной передачи данных.
При последовательном обмене данными (бит за битом) требуется обеспечить побитную и покадровую синхронизацию. Побитная синхронизация необходима для правильного приема передаваемых битов, покадровая синхронизация – для выделения сообщения из принятой последовательности битов. Интерфейсы периферийных устройств с последовательной передачей информации могут работать в асинхронном и синхронном режимах. В синхронном режиме параллельно с передачей по линии данных информационных битов по линии синхросигналов передается последовательность синхроимпульсов, что позволяет решить проблему побитной синхронизации передатчика и приемника независимо от длины сообщения.
В асинхронном режиме побитная синхронизация приемника и передатчика осуществляется по первому (стартовому) биту и затем поддерживается абонентами в течение времени передачи кадра стабильностью тактовых частот генераторов передатчика и приемника, частоты которых должны быть равны. Скорость передачи в асинхронном режиме ниже и допустимое число бит в информационной посылке (кадре) меньше.
Покадровая синхронизация в асинхронном режиме осуществляется обрамлением информации при передаче по линии стартовым и стоповым битами. Стандартный кадр для асинхронного режима передачи данных представлен на рис.
Покадровая синхронизация в синхронном режиме осуществляется использованием специальных кодовых последовательностей (флагов или специальных знаков) в общем случае в начале и конце кадра.
Коды последовательных интерфейсов
В последовательных интерфейсах применяют различные методы кодирования последовательной информации. Коды последовательных интерфейсов должны обладать следующими основными свойствами:
минимальной частотной полосой при одинаковой битовой скорости;
самосинхронизацией;
отсутствием постоянной составляющей (даже при передаче длинной последовательности нулей и единиц).
Наиболее часто используются следующие коды:
Код без возвращения к нулю (БВН) (NRZ).
Код без возвращения к нулю с инверсией (БВНИ).
Код Манчестер 2.
Метод NRZ прост, характеризуется хорошей распознаваемостью ошибок (из-за двух резко отличающихся потенциалов), но не обладает свойством самосинхронизации. При передаче длинной последовательности единиц или нулей сигнал на линии не изменяется, поэтому приемник не может определить моменты времени, когда нужно в очередной раз считывать данные. При высоких скоростях обмена и длинных последовательностях единиц или нулей небольшое рассогласование тактовых частот может привести к ошибке в целый такт и, соответственно, считыванию некорректного значения бита. Серьезный недостаток NRZ – наличие низкочастотной составляющей.
При манчестерском кодировании каждый такт делится на две части. Информация кодируется перепадами потенциала, происходящими в середине каждого такта. Единица кодируется перепадом от высокого уровня сигнала к низкому, а нуль – обратным перепадом. Переходы производятся в середине временного интервала, отведенного каждому двоичному биту. Код Манчестер II легко получается из кода без возвращения к нулю, если последний подать на один вход схемы логической равнозначности, на второй вход которой подан синхросигнал в виде меандра с периодом, равным периоду кода БВН, и синфазный с ним. Например:
-

последовательность двоичных битов
Код 6eз возвращения к нулю
Синхросигнал
Код Манчестер II
Так как сигнал изменяется в каждом такте передачи бита данных, то манчестерский код обладает хорошими самосинхронизирующими свойствами. Полоса пропускания манчестерского кода уже, чем у биполярного импульсного. У него также нет постоянной составляющей (половину времени сигнал положительный, половину – отрицательный). Это дает возможность использовать для гальванической развязки импульсные трансформаторы. При этом не требуется дополнительного источника питания для линии связи, как для оптронной развязки.
Основные параметры наиболее распространенных в МП- системах последовательных интерфейсов приведены в таблице.
Табл. Основные параметры последовательных интерфейсов в МК - системах
Параметры |
SPI |
I2С** |
RS-232C |
USB-1 |
RS-485C |
CAN |
1-Wire (MicroLAN) |
Максимальная скорость передачи |
10 Мбод |
100 кбит/с, до 400 кбит/с (версия 2 – до 4 Мбит/с) |
115 кбод |
12 Мбод |
10 Мбод |
1 Мбод |
16,3 кбит/с до 142 кбит/с |
Макс. длина линий связи, м |
10 |
2 |
15 |
10 |
1200 при 100 кбод 12 – при 10 Мбод |
5000 |
300 |
Число линий связи |
3 + n* |
2 |
2 |
4 |
2 |
2 |
1 |
Число абонентов в интерфейсе |
n+1 |
128 |
2 |
128 |
|
|
256 |
Примечание: * n – число ведомых устройств в системе.
** интерфейс I2С также называют Two Wire Serial Interface.
|
|
Физический уровень интерфейса RS-232C |
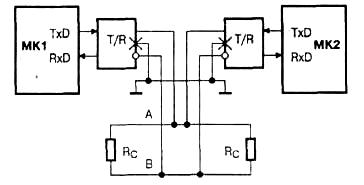
Физический уровень интерфейса RS-485C |
|
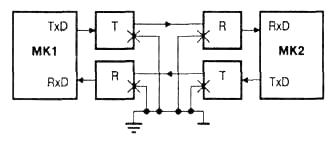
Физический уровень интерфейса CAN |
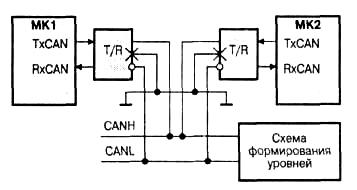
Физический уровень интерфейсов SPI, I2С и низкоскоростного USB реализуется стандартными логическими сигналами, поэтому специальные схемы преобразователей уровней для них не требуются.