

4. Нормальное и тангенциальное ускорение
Рассмотрим равномерное движение МТ по окружности. Пусть в рассматриваемый момент времени t МТ находится в положении 1 (Рис. 6).
С пустя
промежуток Δt
МТ окажется в положении 2, пройдя путь
Δs,
равный дуге 1-2.
пустя
промежуток Δt
МТ окажется в положении 2, пройдя путь
Δs,
равный дуге 1-2.
При этом скорость
МТ
![]() получает приращение
получает приращение
![]() ,
в результате чего вектор скорости,
,
в результате чего вектор скорости,
оставаясь неизменным по величине (при равномерном движении по окружности
![]() ),
повернется на угол Δφ,
совпадающий по величине с центральным
углом, опирающимся на дугу длиной Δs:
),
повернется на угол Δφ,
совпадающий по величине с центральным
углом, опирающимся на дугу длиной Δs:
![]() (21), где R – радиус окружности, по которой
(21), где R – радиус окружности, по которой
движется МТ.
Найдем приращение
вектора скорости
.
Для этого перенесем вектор
![]() параллельно самому себе так, чтобы его
начало совпадало с началом вектора
.
Тогда вектор
будет изображен отрезком, проведенным
из конца вектора
в конец вектора
.
Этот отрезок служит основанием
равнобедренного треугольника со
сторонами
и
и углом Δφ
при вершине. Для малых Δt
угол Δφ
невелик, поэтому приближенно можно
записать:
параллельно самому себе так, чтобы его
начало совпадало с началом вектора
.
Тогда вектор
будет изображен отрезком, проведенным
из конца вектора
в конец вектора
.
Этот отрезок служит основанием
равнобедренного треугольника со
сторонами
и
и углом Δφ
при вершине. Для малых Δt
угол Δφ
невелик, поэтому приближенно можно
записать:
![]() (22).
(22).
Если ввести
единичный вектор
![]() ,
тогда можно записать:
,
тогда можно записать:
![]() (23).
Подставляя (21) в (23), имеем:
(23).
Подставляя (21) в (23), имеем:
![]() (24).
Разделив обе части (24) на Δt
и переходя к пределу, получим ускорение:
(24).
Разделив обе части (24) на Δt
и переходя к пределу, получим ускорение:
![]() (25).
(25).
В этом выражении
![]() и R
– постоянные величины;
и R
– постоянные величины;
![]() ;
единичный вектор
;
единичный вектор
![]() в пределе совпадет с единичным вектором
в пределе совпадет с единичным вектором
![]() ,
нормальным к окружности в точке 1 и
направленным к центру. Следовательно,
можно записать:
,
нормальным к окружности в точке 1 и
направленным к центру. Следовательно,
можно записать:
![]() (26).
(26).
Нормальное
ускорение –
это ускорение, которое направлено по
нормали к траектории; его называют и
обозначают символом
![]() .
Модуль нормального ускорения равен:
.
Модуль нормального ускорения равен:
![]() (27).
(27).
Чем меньше радиус закругления, тем больше искривлена траектория и тем больше величина нормального ускорения при той же величине скорости. За меру кривизны принимают величину R-1, которую называют кривизной окружности.
Очевидно, что
ускорение МТ, движущейся по произвольной
кривой, также будет зависеть от кривизны
траектории, которая различна в разных
точках. Найдем ускорение МТ, движущейся
по произвольной плоской кривой. Разложим
вектор приращения скорости
на две составляющие:
![]() и
и
![]() (рис. 7).
(рис. 7).
Э ти
составляющие выберем так, чтобы
расстояние от точки 1 до конца вектора
было равно модулю скорости
в начальный момент времени. Тогда,
очевидно, модуль вектора
будет равен приращению модуля скорости:
ти
составляющие выберем так, чтобы
расстояние от точки 1 до конца вектора
было равно модулю скорости
в начальный момент времени. Тогда,
очевидно, модуль вектора
будет равен приращению модуля скорости:
![]() (28).
(28).
Если ввести
единичный вектор
![]() ,
тогда можно записать:
,
тогда можно записать:
![]() (29).
(29).
Для вектора полного
ускорения запишем:
![]() (30).
Тангенциальное ускорение, учитывая
(29), имеет явный вид:
(30).
Тангенциальное ускорение, учитывая
(29), имеет явный вид:
![]() (31).
(31).
При переходе к
пределу единичный вектор
![]() совпадет с единичным вектором
совпадет с единичным вектором
![]() ,
направленным по касательной к траектории
в точке 1 в сторону движения. Этот вектор
можно определить так:
,
направленным по касательной к траектории
в точке 1 в сторону движения. Этот вектор
можно определить так:
![]() (32).
(32).
Тогда из (29), (31) и
(32) следует:
 (33).
(33).
Итак, вектор
полного ускорения равен векторной
сумме тангенциального
![]() и нормального
ускорения, первый из которых (
)
направлен по касательной к траектории,
а второй (
)
перпендикулярен к вектору скорости
и направлен к центру кривизны траектории
(Рис. 8).
и нормального
ускорения, первый из которых (
)
направлен по касательной к траектории,
а второй (
)
перпендикулярен к вектору скорости
и направлен к центру кривизны траектории
(Рис. 8).
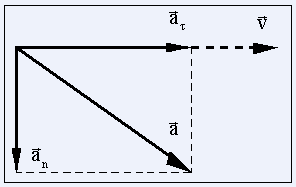
Рис. 8. Вектор полного ускорения материальной точки
Вектор тангенциального
ускорения характеризует изменение
скорости по величине. Если скорость не
меняется по величине, то тангенциальное
ускорение равно нулю и
![]() .
.
Вектор нормального
ускорения
характеризует изменение скорости по
направлению. Если направление скорости
не изменяется, движение происходит по
прямолинейной траектории. Кривизна
прямой равна нулю (радиус кривизны
равен бесконечности), следовательно,
нормальное ускорение равно нулю и
выполняется
![]() .
В общем случае модуль вектора полного
ускорения равен (Рис. 8):
.
В общем случае модуль вектора полного
ускорения равен (Рис. 8):
![]() (34).
(34).