

Вывод преобразований Лоренца в трехмерном векторном виде
Общий вид линейных преобразований
t' = att(u)t+atx(u)x+aty(u)y+atz(u)z, x' = axt(u)t+axx(u)x+axy(u)y+axz(u)z, y' = ayt(u)t+ayx(u)x+ayy(u)y+ayz(u)z, z' = azt(u)t+azx(u)x+azy(u)y+azz(u)z, |
можно записать через трехмерные вектора:
t' = a(u)t+b(u)(ur), r'|| = d(u)ut+e(u)r||, r'^ =f(u)r^ . |
(L3d) (L4d) (L5d) |
Теперь учтем, что точка r=0 движется со скоростью u вдоль оси X' в системе k': r'=ut'. Из уравнений (L3d), (L4d) следует d(u)= a(u). Для симмтерии заменим b(u)=-a(u)g(u) Аналогично точка r'=0 движется со скоростью u вдоль оси X в системе k: r=ut . Из тех же уравнений следуетe(u)= a(u):
t' = a(u)[tg(u)(ur)], r'|| = a(u)[ r|| ut]. |
(L8d) (L9d) |
Рассмотрим еще одну инерциальную систему отсчета k'', движущуюся со скоростью u' вдоль оси X' системы k'. Закон преобразования из системы k' в систему k'' должен иметь вид, аналогичный (L8), (L9):
t'' = a(u')[t'g(u')(u'r')], r''|| = a(u')[ r'|| u't'], r''^ =f(u')r'^ . |
(L10d) (L11d) (L11pd) |
Подставляя в (L10d), (L11d) выражения для r', t' из (L5d), (L8d), (L9d), получаем
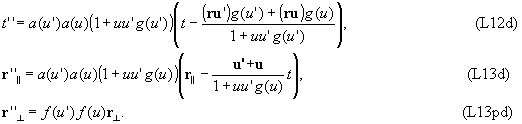
С другой стороны, равенства (L12d), (L13d), (L13pd) описывают переход из системы k в систему k', движущуюся вдоль оси X с некоторой скоростью u'':
t'' = a(u'')[tg(u'')(u''r)], r''|| = a(u'')[r|| u''t], r''^ =f(u'')r^ . |
(L14d) (L15d) (L15pd) |
Из сравнения соотношений (L12d), (L13d) с (L14d), (L15d) следуют равенства
g(u)=g(u')=g=const, |
(L16d) |
a(u'')=a(u)a(u')(1+uu'g), |
(L17d) |
u''=(u+u')/(1+uu'g), |
(L18d) |
f(u'')=f(u)f(u'). |
(L18pd) |
Равенства (L16d), (L17d), (L18d) совпадают с (L16), (L17), (L18), а (L18pd) с учетом (L18d) позволяет сделать вывод, что 0f(u) =1, т. е. поперечные координаты действительно не преобразуются при линейных преобразованиях Лоренца.
Окончательно в векторной форме имеем
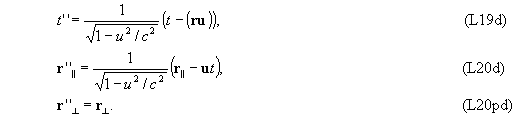
Заметим, для полноты, что в формулах (L20d), (L20pd) r||=u(ru)/u2, r ^=ru(ru)/u2
Следствия из преобразований Лоренца
1. Если в одной системе отсчета некоторые события происходят в точках x1 и x2 в один и тот же момент времени t, то в другой системе отсчета эти события происходят в точках x'1 и x'2 в разные моменты времени t'1 и t'2:
![]()
Понятие одновременности оказывается зависящим от выбора системы отсчета.
2. Если в одной системе отсчета между двумя событиями, происходящими в одной и той же точке, проходит время t, то в другой системе отсчета между этими же событиями проходит время

Это соотношение выражает релятивистский эффект замедления времени в движущихся объектах.
3. Если в одной системе отсчета покоящаяся линейка имеет длину l, то в системе отсчета, в которой линейка движется со скоростью u вдоль своей оси, ее длина
![]()
Этот эффект называется релятивистским сокращением продольных размеров тела. Поперечные размеры тела не изменяются при переходе в другие инерциальные системы отсчета.
4. Если в одной системе отсчета тело имеет скорость v = (vx, vy, vz), то его скорость v' = (v'x, v'y, v'z) в другой системе отсчета равна
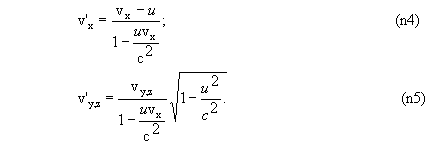
или
в трехмерной векторной форме

5. Из соотношений (n4), (n5) следует постоянство скорости c в различных системах отсчета. Действительно, если вычислить сумму квадратов левых частей этих равенств при условии
v2=(vx)2+(vy) 2+(vz) 2=c2, (n6)
получим
v'2=(v'x)2+ (v'y)2+(v'z) 2=c2. (n7)
Т. е. скорость c одинакова по величине во всех инерциальных системах отсчета (независимо от направления). Заметим, что направления скоростей v и v' в общем случае различны в разных системах отсчета.