

1.2 Формализация задачи
Так как запись значений функции в файл – тривиальная задача, перейдем к описанию метода МНК.
МНК ищет параметры эмпирической формулы вида
![]() .
.
Поиск параметров осуществляется из условия минимума функции S
![]() , (1.2)
, (1.2)
которая является ничем иным, как суммой квадратов остатков регрессии [1, стр. 66].
На практике наиболее часто используется случай, когда эмпирическая формула является линейной по неизвестным параметрам а0, a1, …, am, т.е. её можно представить в виде
![]() . (1.3)
. (1.3)
В частности функция (1.1) такой и является. Если (1.3) подставить в (1.2) и приравнять к нулю все частные производные по неизвестным параметрам, то можно прийти к следующей системе алгебраических линейных уравнений [1, стр. 67]
 (1.4)
(1.4)
где (x) – эмпирическая формула;
aj – неизвестные параметры эмпирической формулы;
yi – опытное значение.
Систему (1.4) можно представить в более наглядной матрично-векторной форме
 . (1.5)
. (1.5)
Параметры эмпирической формулы находятся решением системы (1.5). Так как матрица в (1.5) всегда квадратная размером m x m, то ее можно решить прямым методом, например методом Гаусса.
Метод Гаусса состоит из двух этапов:
Прямой ход (матрица, составленная из коэффициентов системы линейных уравнений, приводится к треугольному виду);
Обратный ход (получение корней системы).
Метод Гаусса применим, если ранг исходной матрицы равен рангу матрицы расширенной. Можно не вычислять ранг отдельно, так как несовместность устанавливается после приведения матрицы к треугольному виду, появлением хотя бы одного нуля на главной диагонали.
1.3 Разработка алгоритма
Первая программа является наиболее простой, поэтому начнем с неё. Совершенно очевидно, что первая программа должна работать по алгоритму, показанному на рисунке 1.1.
В данной блок-схеме под f(x) понимается функция (1.1), под g(sgm) понимается некоторая функция, которая возвращает случайное число, подчиняющееся нормальному распределению, с заданной дисперсией sgm.
Генерация случайного значения в данной задаче (как будет показано в следующем разделе) основана на центральной предельной теореме, т.е. случайное число получается суммой большого числа случайных чисел с равномерным распределением.
Общий алгоритм работы второй программы показан на рисунке 1.2. Блоки прямого хода, обратного хода и заполнение исходной матрицы со свободным вектором, для экономии места, представим в нотации Найси-Шнайдермана (так называемые структурограммы [1, стр.286]). На рисунке 1.3 показана струкутрограмма алгоритма заполнения исходной матрицы и свободного вектора, а на рисунке 1.4 показана структурограмма метода Гаусса. В структорограмме рисунка 1.3 под массивом Y{} понимается файл с точками. Так же следует обратить внимание на то, что, хотя нумерация элементов массивов и идет с нуля, следует передавать размер массива натуральным числом. Запись вида A{ai,j=0}m x m подразумевает двумерный массив размером m x m, заполненный при передаче нулевыми элементами. Индексация элементов в массивах при такой записи всегда от 0 и до m-1.
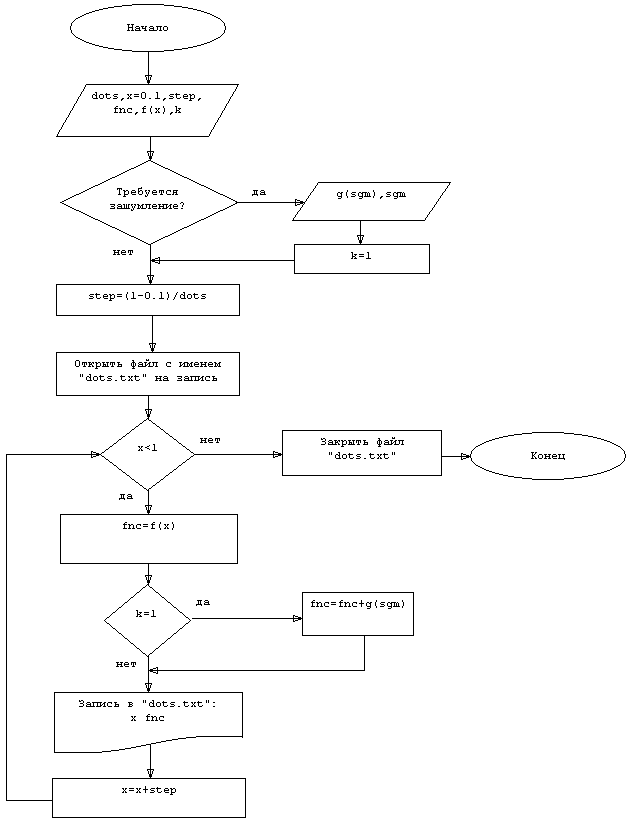
Рисунок 1.1 Алгоритм работы программы создания точек
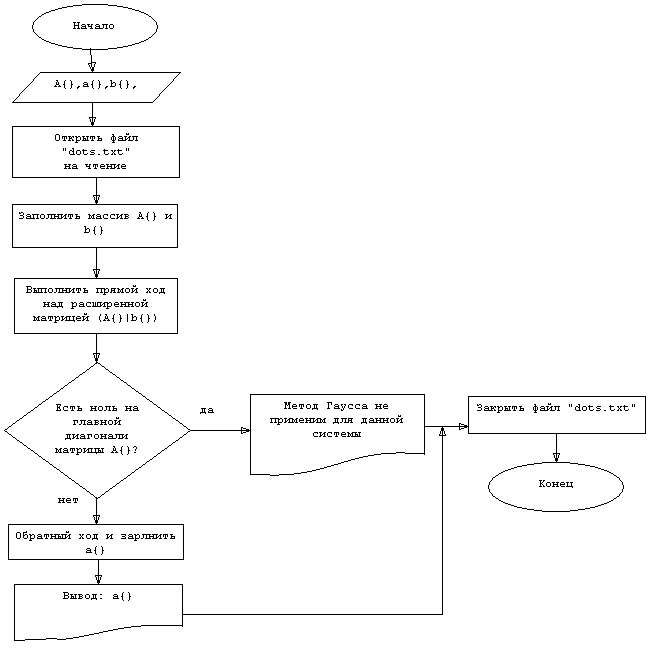
Рисунок 1.2 Алгоритм работы программы аппроксимации
# Под m здесь понимается реальный размер, как это принято в математике. Индексация многомерных массивов начинается с нуля и заканчивается m-1. |
||||
Ввод A{ai,j=0}m x m, b{bi = 0}0…m-1, Y{xi, yi}0…n |
||||
для i от 0 |
||||
|
для k от 0 |
|||
|
|
для j от k |
||
|
|
|
ak, j = ak, j + k(xi) j(xi) |
|
|
|
|
kj да |
нет |
|
|
|
aj, k =ak, j |
|
|
|
до m-1 |
||
|
|
bk = bk + k(xi) yi |
||
|
до m-1 |
|||
до n |
||||
Вывод A{ai,j}m x m, b{bi }0…m-1 |
||||
Рисунок 1.3 Подготовка массивов для обработки
# Под m здесь понимается реальный размер, как это принято в математике. Индексация многомерных массивов начинается с нуля и заканчивается m-1. |
|||||
Ввод A{ai,j}m x m, a{ai}0…m-1, b{bi = 0}0…m-1 |
|||||
для k от 0 |
|||||
|
для i от k+1 |
||||
|
|
W = ai, k / ak, k |
|||
|
|
для j от k |
|||
|
|
|
ai, j = ai, j – W ak, j |
||
|
|
до m-1 |
|||
|
|
bi = bi – W bk |
|||
|
до m-1 |
||||
до m-2 |
|||||
W=1 |
|||||
для i от 0 |
|||||
|
W = W ai, i |
||||
до m-1 |
|||||
W=0 да |
нет |
||||
|
для i от m-1 |
||||
|
|
s=0 |
|||
|
|
для j от i |
|||
|
|
|
s=s+ai, jaj |
||
|
|
до m-1 |
|||
|
|
ai = (bi – s) / ai, i |
|||
|
до 0 |
||||
|
Вывод a{ai}0…m-1 |
||||
Рисунок 1.4 Структурограмма метода Гаусса
Запись вида b{bi = 0}0…m-1 подразумевает вектор (или одномерный массив), заполненный при передаче нулевыми значениями. Снизу справа определяется индексация элементов в массиве.
Структурограммы легко переводятся на процедурные языки программирования и также легко читаются.