

Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
Национальный минерально-сырьевой университет «Горный»
Химико-металлургический факультет
Кафедра автоматизации технологических процессов и производств
Отчет по преддипломной практике.
И.о. зав. кафедрой: Кульчицкий А.А.
Руководитель: Смирнов А.Г.
Выполнил: Гаврилин Е.В.
Шифр: 9804111992
Санкт-Петербург
2012
Введение
Во время прохождения практики я рассмотрел устройство промышленного трех осевого робота с цилиндрической системой координат.
Собственно отвечу на вопрос, что такое ПР ( промышленный робот ). Промышленный робот-автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов. Только расширенное применение ПР будет оправдано как технологически, так и экономически и социально. Применение ПР по сравнению с традиционными средствами автоматизации обеспечивает большую гибкость технических и организационных решений, снижение сроков комплектации и запуска в производство гибких автоматических систем. Применение ПР позволяет переходить к многостаночному обслуживанию, а значит и экономии рабочей силы и к работе оборудования в две, три смены.
Применение ПР меняет и роль рабочего – он становится более квалифицированным специалистом – оператором, наладчиком. Применение ПР позволяет решать не только экономические, технические, но и социальные вопросы, особенно в случае необходимости замены рабочего на участках с опасными вредными для здоровья условиями труда. ПР освобождают человека от выполнения бездумной механической работы. ПР применяются в различных отраслях промышленности, как в мелкосерийном так и массовом производстве. В зависимости от этого меняются конструкции ПР их сложность средства управления и информации.
Механика манипулятора пр.
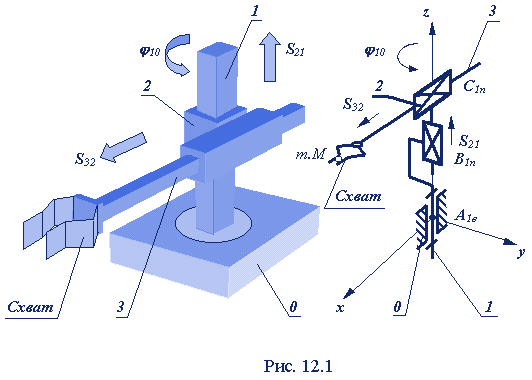
Рис. 1.1 принципиальная схема ПР
Основной механизм руки манипулятора состоит из неподвижного звена 0 и трех подвижных звеньев 1,2 и 3 (рис.1.1). Структурная схема механизма этого манипулятора соответствует цилиндрической системе координат. В этой системе звено 1 может вращаться относительно звена 0 (относительное угловое перемещение j 10 ), звено 2 перемещается по вертикали относительно звена 1 (относительное линейное перемещение S 21 ) и звено 3 перемещается в горизонтальной плоскости относительно звена 2 (относительное линейное перемещение S 32 ). На конце звена 3 укреплено захватное устройство или схват , предназначенный для захвата и удержания объекта манипулирования при работе манипулятора. Звенья основного рычажного механизма манипулятора образуют между собой три одноподвижные кинематические пары (одну вращательную А и две поступательные В и С) и могут обеспечить перемещение объекта в пространстве без управления его ориентацией.
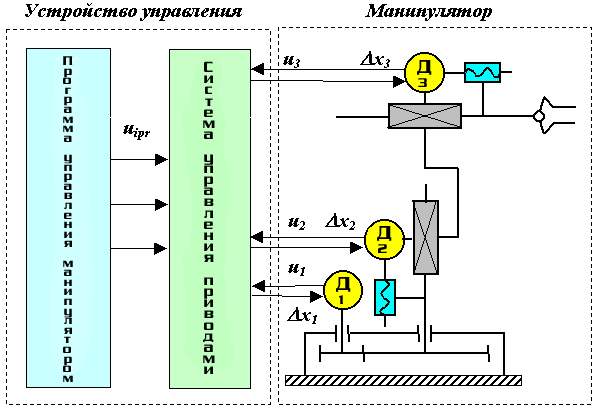
Для выполнения каждого из трех относительных движений манипулятор должен быть оснащен приводами, которые состоят из двигателей с редуктором и системы датчиков обратной связи. Так как движение объекта осуществляется по заданному закону движения, то в системе должны быть устройства сохраняющие и задающие программу движения, которые назовем носителями программ.
Функциональная схема промышленного робот
Приводы пр
Анализ и обобщение опыта и тенденций создания промышленных роботов в отечественной и зарубежной робототехнике показывает, что все большее распространение получает электромеханический привод промышленных роботов. В последние годы применяют электромеханические приводы с высокомоментными двигателями постоянного тока, асинхронными двигателями с частотным управлением, бесколлекторные двигатели постоянного тока и силовые шаговые двигатели. Электроприводы этих серий обеспечивают регулирование скорости в большом диапазоне и имеют хорошие показатели по габаритным размерам и массам.
Особенности электроприводов расширенный (до 0,05 Н м) диапазон малых моментов, повышенная (до 15 * 108 об/мин) максимальная частота вращения, уменьшенная инерция двигателей, возможность встраивать в двигатели электромагнитные тормозы и различные датчики, а также механические и волновые передачи. Основные достоинства электромеханического привода следующие: -высокое быстродействие; -широкий диапазон регулирования частоты вращения; -компактная конструкция двигателей и возможность встраивать датчики скорости и положения; -равномерность вращения; -большой крутящий момент на максимальной скорости; -высокая надежность; -высокая точность позиционирования за счет применения цифровой измерительной системы с высокоточными датчиками в цепи обратной связи; -низкие уровни шума и вибрации; -широкие возможности взаимозаменяемости двигателей; -компактная конструкция преобразователей; -удобство подвода энергии (по стандартным проводам).
К недостаткам можно отнести:
-наличие щеток в коллекторах двигателей постоянного тока; -ограниченность использования во взрывоопасных средах; -наличие дополнительной кинематической цепи между электродвигателем и рабочим органом робота.
Основной элемент, непосредственно преобразующий электрическую энергию в механическую, в электроприводе - электрический двигатель. Управляется последний чаще всего с помощью соответствующих преобразовательных и управляющих устройств, которые формируют статические и динамические характеристики электропривода, отвечающие требованиям производственного механизма. Речь идет не только о сообщении вращательного или поступательного движения, но главным образом об обеспечении оптимального режима работы механизма или машин, при котором достигается наибольшая производительность при высокой точности.

Рис. 1.2 Мотор редуктор
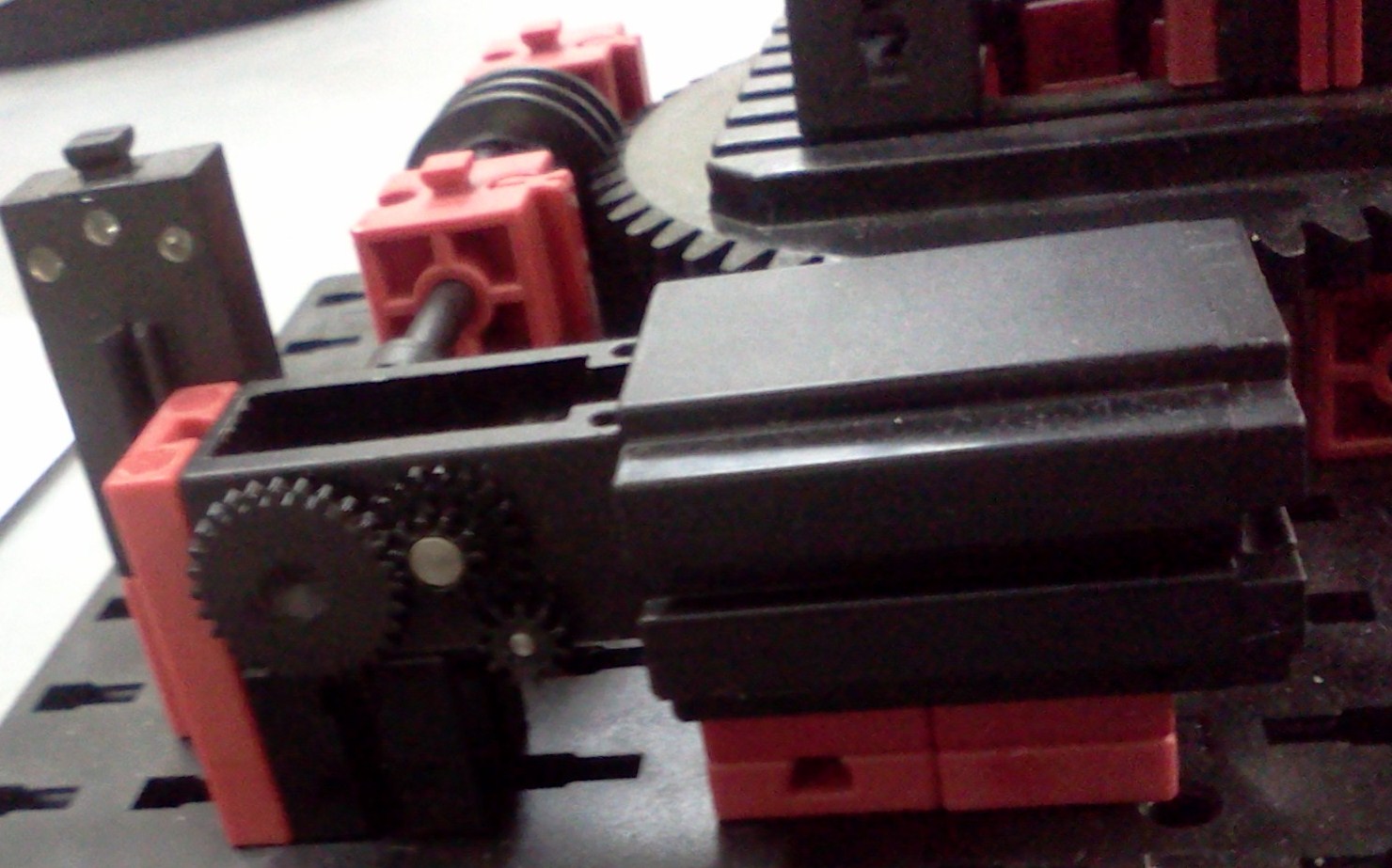
Рис 1.3 Скорость оборотов/мин двигателя, который приводит в движение схвата, поворачивает робот 6720 об/мин
Инкрементальные датчики вращения и датчики угла определяют текущую координату путем подсчета числа импульсов после прохождения нулевой точки, счётчиком (отдельный прибор). Для привязки системы отсчета инкрементальные датчики имеют референтную метку (одну на оборот), через которую нужно пройти после включения оборудования.
Задачи управления ПР является многообразными и составляют предмет теории автоматического управления с учетом специфических требований, предъявляемых к ПР.
Система управления роботом состоит из управляющего устройства и объекта(объектов) управления в виде манипуляторов, устройств передвижения (в случае подвижного робота) и других устройств, которые могут входить в состав робота или являясь конструктивно и технологически самостоятельными, подлежат общему управлению.
Поскольку основной задачей является управления роботом является управления манипуляторами, в дальнейшем под системой управления робота будем понимать систему управления именно его манипуляторами. Вместе с тем основные положения, изложенный далее об управлении манипуляторами, полностью относятся и к управлению другими объекта робота.
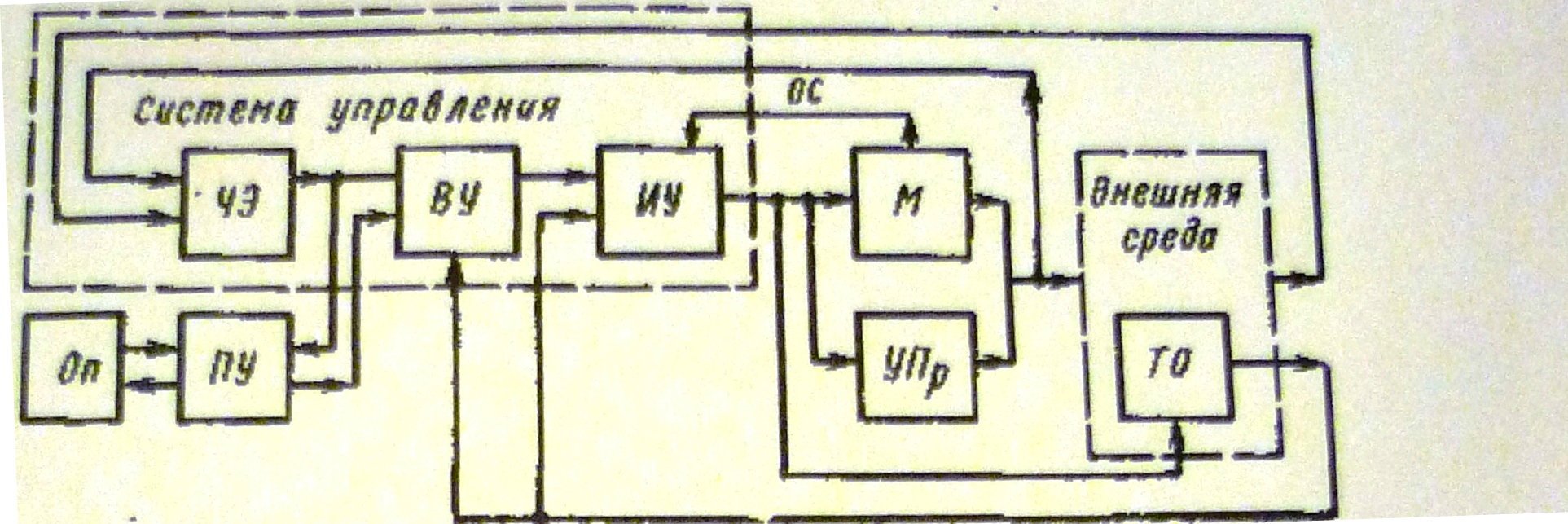
Рис 1.4 общая схема автоматически действующей роботохнической системы:
ЧЭ-чувствительный элемент; ВУ- вычислительное устройство; ИУ-исполнительное устройство; М-манипуляторы; Оп-оператор; ПУ-пульт управления ; УПр- устройство передвижения; ТО-технологическое оборудование; ОС-обратная связь.