

Кінематичні ланцюги
Кінематичний ланцюг – це сукупність ланок, що з'єднані кінематичними парами. Види кінематичних ланцюгів
Простий Складний
Відкритий |
|
|
Замкнутий |
|
|

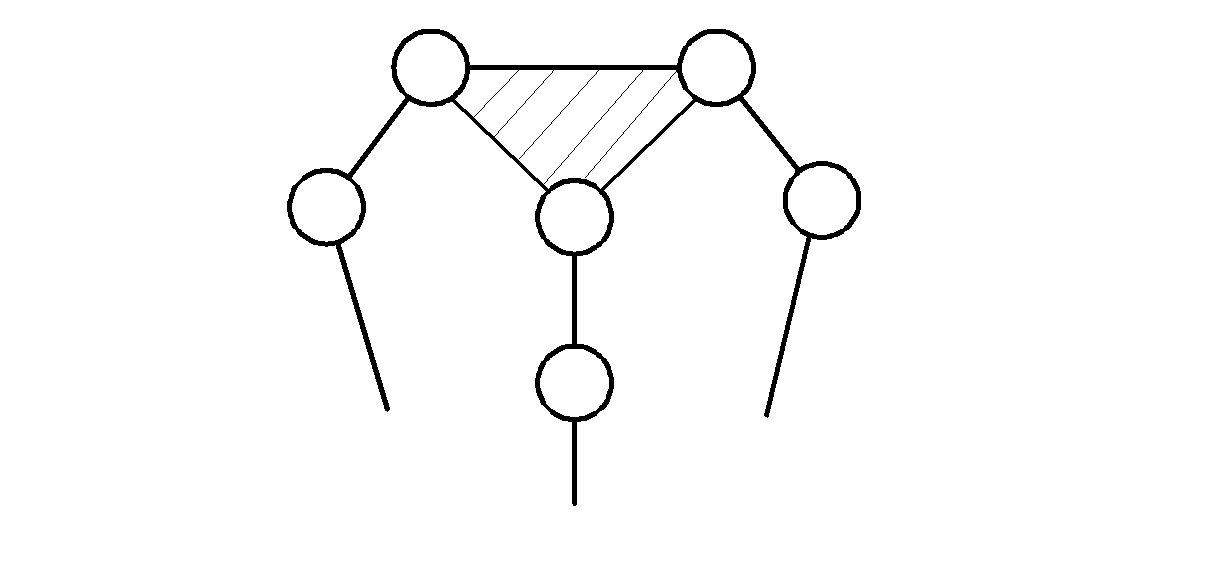


Простий КЛ – це ланцюг, у якого кожна ланка входить не більш ніж до двох кінематичних пар. Складний КЛ – це ланцюг, у якого є хоча б одна ланка, що входить більш ніж до двох кінематичних пар.
Відкритий КЛ – це ланцюг, ланки якого не утворюють замкнутих контурів.
Замкнутий КЛ – це ланцюг, ланки якого утворюють один чи декілька замкнутих контурів.
Плоский КЛ - це ланцюг, ланки якого переміщуються в паралельних площинах.
Просторовий КЛ - це ланцюг, ланки якого переміщуються по площинах, що перетинаються, або по просторових поверхнях.
Кінематичні зєднання
Будь-яку кінематичну пару можна розглядати як дволанковий незамкнений кінематичний ланцюг, призначений для відтворення заданого відносного руху ланок. Іноді з метою відтворення цього ж руху конструктивно більш зручним (наприклад, компактнішим) буде кінематичний ланцюг, який складається більше ніж із двох ланок. Кінематичний ланцюг, який конструктивно замінює в механізмі кінематичну пару, називається кінематичним з’єднанням.
Застосування кінематичних з’єднань замість кінематичних пар дає змогу збільшити несучу здатність конструкції машини, зменшити витрати на тертя, спростити технологію виготовлення.
Вхідні, вихідні, початкові, ведучі, ведені ланки.
Вхідна ланка – це ланка, якій надається рух, що підлягає перетворенню.
Вихідна ланка – це ланка, яка здійснює рух, для виконання якого призначений механізм.
Ведуча ланка – ланка, для якої елементарна робота зовнішніх сил, що прикладені до неї, додатна.
Ведена ланка – ланка, для якої елементарна робота зовнішніх сил, що прикладена до неї, від'ємна.
Початкова ланка – це ланка, якій приписано узагальнену координату, що однозначно визначає положення механізму.
Кінематична схема механізму. Масштаб у тмм.
Кінематична схема механізму – це форма опису механізму, що містить інформацію для його кінематичного дослідження. Такою інформацією є характер кінематичних пар та їх точне розташування.
КСМ виконується в масштабі.
Масштаб у ТММ – це масштабний коефіцієнт, який показує, скільки натуральних фізичних одиниць міститься в одному міліметрі відрізку, що зображує цю величину.
Має розмірність.Приклади:
 -
масштаб довжини, м/мм;
-
масштаб довжини, м/мм; -
масштаб швидкості, мс-1/мм;
-
масштаб швидкості, мс-1/мм; -
масштаб прискорення, мс-2/мм;
-
масштаб прискорення, мс-2/мм; -
масштаб сили, Н/мм;
-
масштаб сили, Н/мм; -
масштаб моменту, Нм/мм;
-
масштаб моменту, Нм/мм; -
масштаб роботи і т. далі.
-
масштаб роботи і т. далі.
Зв'язок
між масштабом довжини в ТММ і масштабом
креслення:
![]() де
m
– степінь зменшення. Наприклад: 1:2
=
0,002 м/мм.
де
m
– степінь зменшення. Наприклад: 1:2
=
0,002 м/мм.
Задачі структурного синтезу механізмів. Структурна схема.
Структурна схема – це форма опису механізму, що містить інформацію про його структуру, тобто про кількість ланок і характер їх з'єднання. Задачею є проектування структурної схеми механізму, яка задовольняє задані умови:
число ланок;
число кінематичних пар відповідних класів;
степінь вільності механізму.
МЕХАНІЗМ – це ланцюг вимушеного руху. Інакше, якщо одну з ланок кінематичного ланцюга з'єднати з двигуном (кількома двигунами) і решта ланок будуть здійснювати визначений закономірний рух, то з кінематичного ланцюга отримуємо механізм за умови, що одну з ланок перетворено на стояк.