

9. Физический смысл параметров настройки
Динамические свойства регуляторов определяются параметрами Ти и Тд . Рассмотрим решение дифференциального уравнения ПИ регулятора при постоянном значении отклонения ( =const)
у= Kp + Kp t/ Ти,
Где Kp =yп—перемещение, вызванное действием пропорциональной части, а Kp t/ Ти =yи перемещение вызванное действием интегральной части ПИ – регулятора.
Из условия равенства уп и уи: Rp =: Rp t/Tи следует, что t=Ти т.е.
Физ. смысл Ти - это время, в течение которого интегральная часть ПИ - регулятора удваивает перемещение регулирующего органа, вызванное действием его пропорциональной части.
Для выяснения
смысла параметра Тд
рассмотрим простейший случай работы
ПД-регулятора, при котором входной
сигнал— отклонение
изменяется с постоянной скоростью
 =V=const
(рис. 10.1). Из этого следует, перемещение
регулирующего органа под воздействием
П – части составит Kp
=yп,
а под действием Д – части регулирующий
орган переместится сразу на величину
уд=KpTдV.
Определим условие, при котором П –
часть переместит регулятор органа на
такую же величину, как и Д – часть.
Учитывая ,что
=vt,
получим
=V=const
(рис. 10.1). Из этого следует, перемещение
регулирующего органа под воздействием
П – части составит Kp
=yп,
а под действием Д – части регулирующий
орган переместится сразу на величину
уд=KpTдV.
Определим условие, при котором П –
часть переместит регулятор органа на
такую же величину, как и Д – часть.
Учитывая ,что
=vt,
получим
KpVt=KpVTд, т.е. t=Тд
Физ. смысл Тд – время, в течение которого пропорциональная часть удваивает действие дифференциальной части регулятора. Д – части как бы предваряет действие пропорциональная часть, заблаговременно перемещая регулирующий орган на величину, зависящую от скорости изменения входной величины . Таким образом, Д – части форсирует ликвидацию возникшего отклонения. Время Tд называют постоянной дифференцирования, а иногда временем предварения. Этот параметр является настройкой Д – части ПД - регулятора.
У ПИД – регулятора в соответствии с его уравнением три параметра настройки: Kp, Ти, Тд. Функциональный смысл этих настроек аналогичен.
Параметры настройки κр,Ти, Тд изменяются вручную с помощью остальных ручек и панели регуляторов. В современных конструкциях регуляторов предусмотрена возможность автоматического ввода в регулятор внешних корректирующих воздействий, изменяющих его настройки в зависимости от условий работы объекта регулирования сил или по рекомендациям УВМ.
10. Методы формирования законов регулирования
Реализацию различных законов автоматического регулирования можно осуществлять тремя способами: 2)с помощью устройств отрицательной обработки связи; 1) путем суммирования сигналов, получаемых от усилительного, интегрирующего и дифференцирующих звеньев в соответствующей комбинации; 3)путем использования обоих методов.
Как правило исполнительные механизмы, применяемые в системах автоматического регулирования, представляют собой интегрирующие звенья и имеют передаточную функцию: Wи.м(р)=1/Ти.мр,
где Ти.м – постоянная времени исполнительного механизма (время перемещения выходного вала из одного крайнего положения в другое при максимальном сигнале).
При помощи
последовательного соединения усилителя
и исполнительного механизма
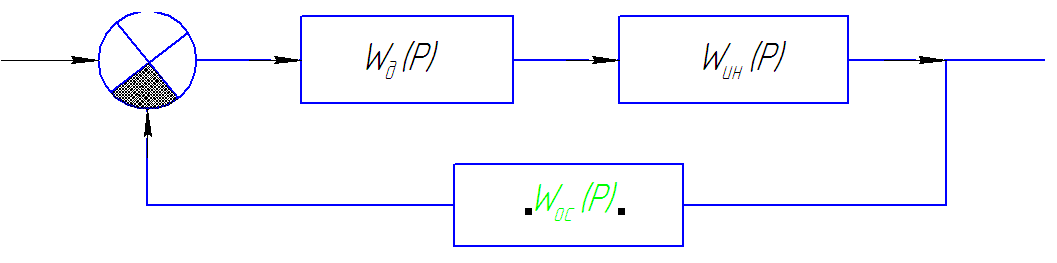
можно осуществить только И-закон регулирования. Для получения других законов регулирования необходимо охватить отрицательной обратной связью усилитель и исполнительный механизм - обратная связь по положению исполнительного механизма или только усилитель – внутренняя обратная связь. По правилам последовательного соединения звеньев и введения обратной связи передаточная функция регулятора по структурной схеме рис.10.2, а: W(p)=Wy(p)Wи.м(p)
имеет вид:
Wp(p)= Wy(p)Wи.м(p)/[1+ Wy(p)Wи.м(p)Wо.с(p)], (10.21)
Передаточная функция усилителя Wy(p)= κу, где κу – коэффициент усиления.
Для структурной схемы передаточная функция будет
W(p)=
Пример:
Найти передаточную
функцию регулятора, состоящего из
гидроцилиндра (интегрирующего звена с
передаточной функцией Wи.м(p)= )
и распределителя с передаточной функцией
Wy(p)=Ку.
)
и распределителя с передаточной функцией
Wy(p)=Ку.
Wp(p)=
Wy(p)Wи.м(p)=
Ку
= - интегрирующее
звено т.е. U-
регулятор.
- интегрирующее
звено т.е. U-
регулятор.
Изменить закон регулирования, введя жесткую обратную связь, по положению исполнительного механизма Wо.с(p)=Кос
W(p)=
 =
= =
= =
= =
=
 =
= - апериодическое
звено т.е. П – регулятор.
- апериодическое
звено т.е. П – регулятор.
Передаточные функции устройств обратной связи, необходимые для получения различных законов регулирования сведем в табл.
Табл. Передаточные функции устройств обратной связи для реализации законов регулирования
Закон регулирования |
WО.С.(р) |
|
Обратная связь по положению регулирующего органа |
Внутренняя обратная связь |
|
П
ПИ
ПД
ПИД |
1/κp
Тир/ [κp(1+ Тир)]
1/[ κp(1+Тдр) ]
|
р/ТИ.М.κР
ТИ/[ κРТИ,М,(1+ТИр)]
р/[ κРТИ,М,(1+ТДр)]
|
В промышленных регуляторах устройства обратной связи реализуются механическими, электрическими, гидравлическими и пневматическими элементами в зависимости от вида потребляемой энергии. Однако передаточные функции этих элементов для получения заданного закона регулирования следует выбирать так, как указано выше.

На диаграмме находят точку соответствия определенную законом регулирования.