

Идеальный Реальный
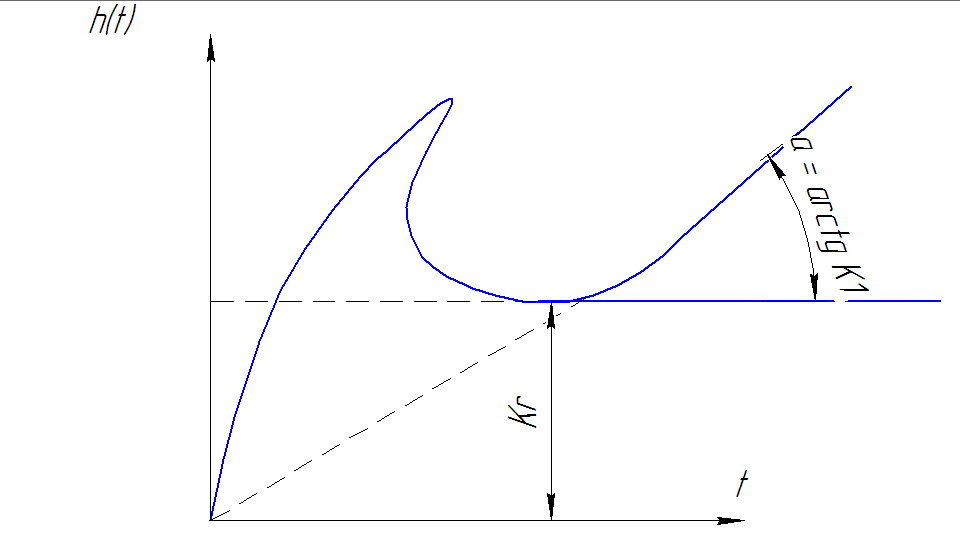
6. Пропорционально – дифференциальный регулятор.
Уравнение ПД – регулятора
 (10.8)
(10.8)
где
 - постоянная времени дифференцирования.
- постоянная времени дифференцирования.
Регулирующее
воздействие состоит из двух составляющих:
пропорциональной
и дифференциальной

Передаточная функция ПД регулятора
 (10.9)
(10.9)
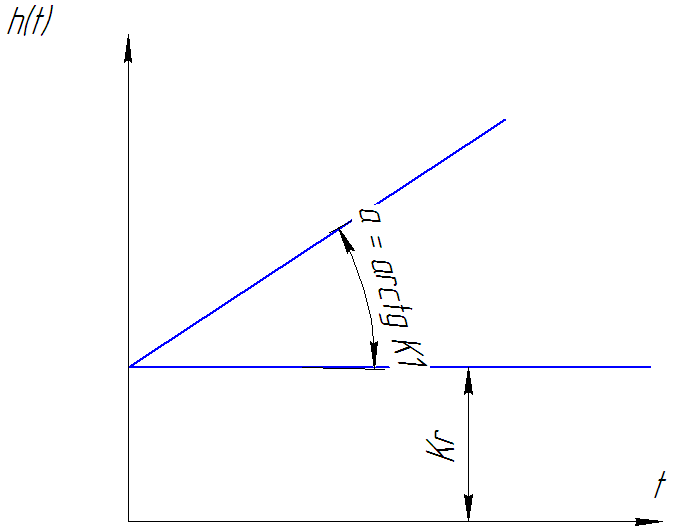
В динамическом отношении ПД - регулятор представляет собой параллельное соединение пропорционального и идеального дифференцирующего звеньев.
Реальные регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1 –го порядка. Поэтому передаточная функция реального регулятора Wр(р) и передаточной функции инерционного апериодического звена 1 –го порядка 1/(ТинР+1):
Wp(p)= Wp(p) Wин(p)= Wp(p)/ 1/(ТинР+1),
Где Тин – постоянная времени инерционного звена.
Идеальный Реальный
7. Пропорционально –интегрально -дифференциальный регулятор.
Уравнение ПИД – регулятора
У= Kp[ +(1/Tи)
+(1/Tи) ]
]
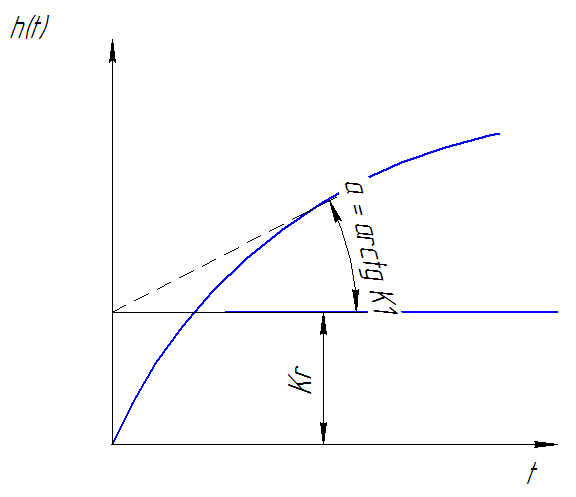
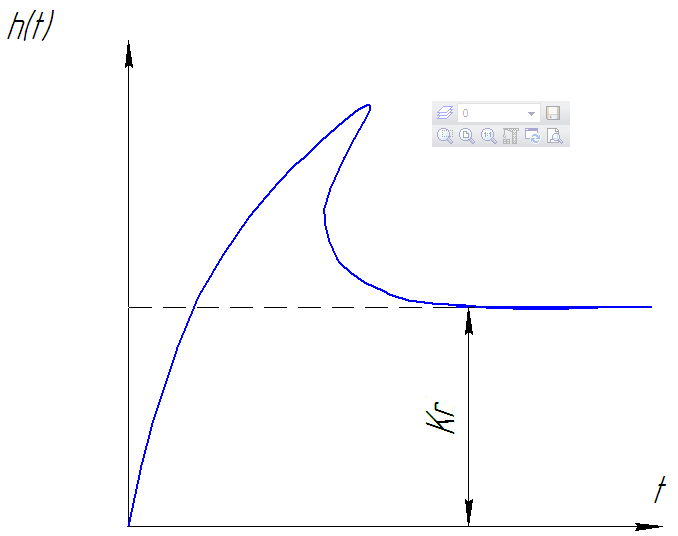
Регулирующее воздействие ПИД – регулятора складывается из воздействий, обусловленных работой П-, И-, Д – составляющих. В динамическом отношении ПИД – регулятор представляет собой представляет собой соединение из трех звеньев: пропорционального, идеального интегрирующего и идеального дифференцирующего.
Передаточная функция ПИД – регулятора
Wпид(р)=
Реальные регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1 –го порядка. Поэтому передаточная функция реального регулятора Wр(р) и передаточной функции инерционного апериодического звена 1 –го порядка 1/(ТинР+1):
Wp(p)= Wp(p) Wин(p)= Wp(p)/ 1/(ТинР+1),
Где Тин – постоянная времени инерционного звена.
Идеальный Реальный
8. Параметры настройки промышленных регуляторов
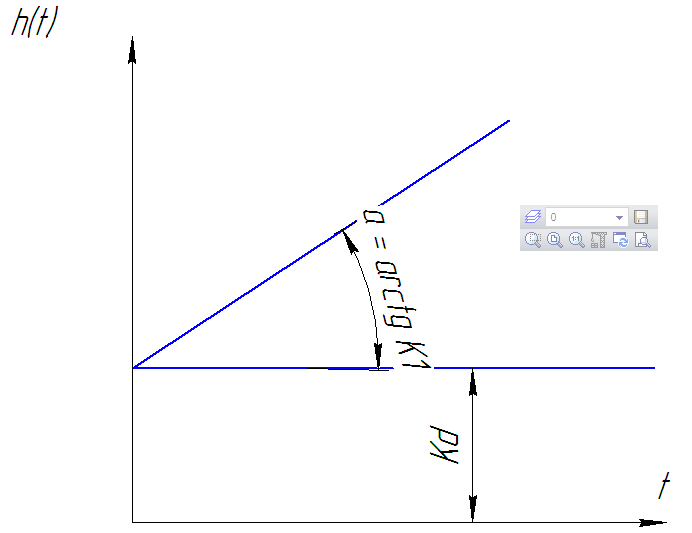
Параметры настройки или просто «настройками» промышленных регуляторов являются коэффициенты дифференциальных уравнений Kp, Kp1, Ти, Тд.
У П - регулятора только одна настройка Kp=у/ , где у—перемещение регулирующего органа( выходного вала исполнительного механизма), % хода, а --отклонение регулируемой величины от заданного значения в единицах регулируемой величины.
Кроме параметров
Kp
или
 ,
статические свойства промышленных
регуляторов определяют порог
чувствительности
,
статические свойства промышленных
регуляторов определяют порог
чувствительности
 или зона нечувствительности
или зона нечувствительности
 .
.
Зоной нечувствительности называется максимальный диапазон изменения сигнала на входе регулятора, не вызывающий появление сигнала на его выходе.
Строго говоря, зона нечувствительности является характеристикой нелинейных регуляторов, но тем не менее и у промышленных линейных регуляторов имеется эта зона вне которой их поведение определяется линейными законами регулирования. Величина «Зоны чувствительности» определяется в относительных единицах:
 /Xmax)100%,
/Xmax)100%,
где -порог чувствительности; Xmax—максимальное значение регулируемой величины.