

13) Фазовый метод пеленгации.
Фазовые методы основаны на измерении разности фаз электромагнитных колебаний, принимаемых различными антеннами. Пусть в точках 1 и 2 расположены две приёмные антенны (рис.2.14), расстояние между которыми (база) равно d.
Принятые
антеннами сигналы подводятся к фазовому
детектору. Выходное напряжение фазового
детектора будет определяться только
разностью фаз колебаний (можно считать
амплитуды обоих колебаний на входе
д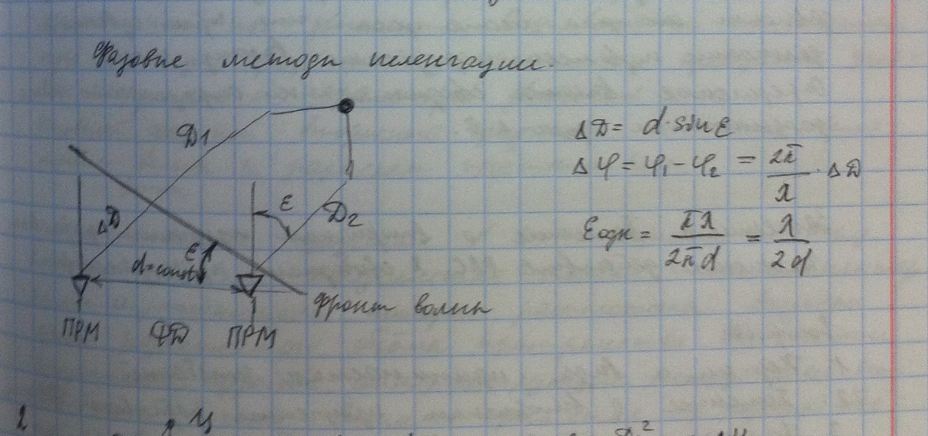 етектора
одинаковы
етектора
одинаковы
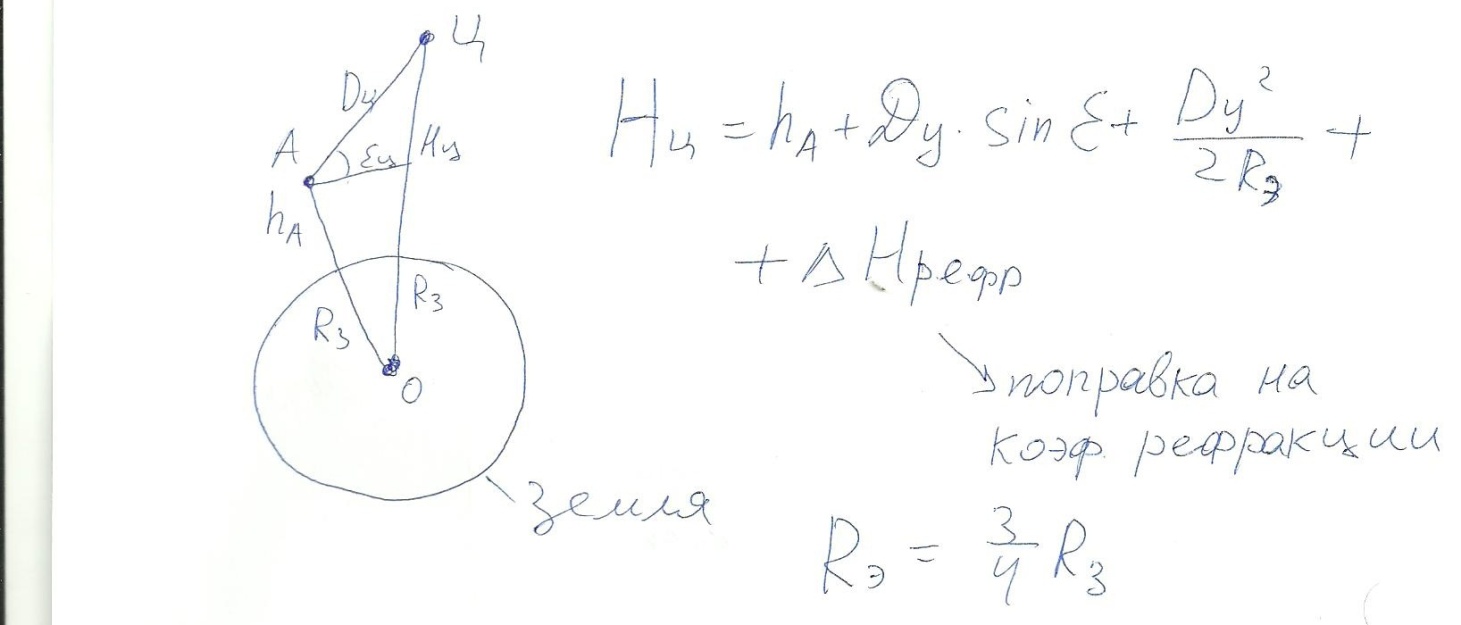
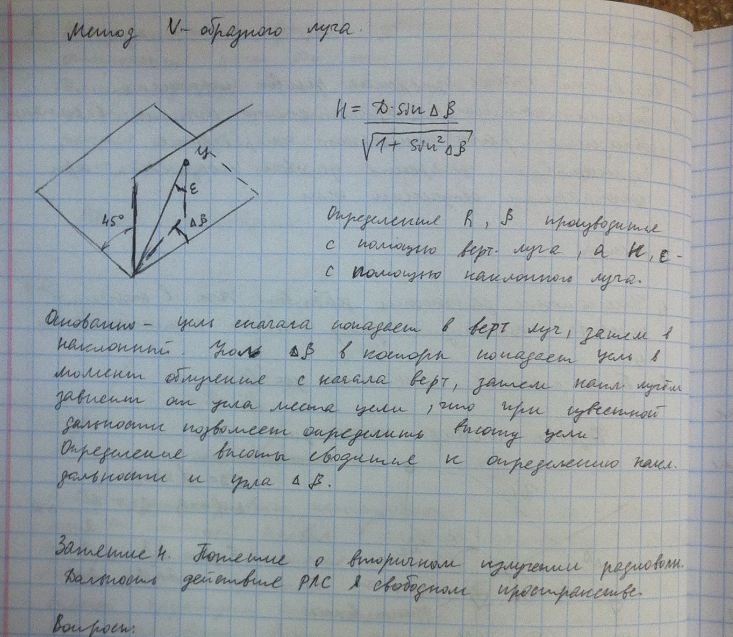
14) Способы определения высоты полета цели
Расчетным методом и какой то V луч
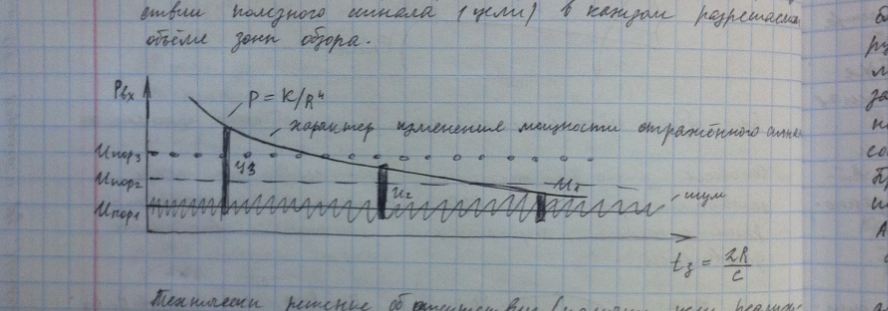
15) Сущность задачи радиолокационного обнаружения целей
Сводится к принятию оператором РЛС или спец аппаратур решения о наличии или отсутствии полезного сигнала(цели) в каждом разрешаемом объеме зоны обзора.
Технически
решение о наличии цели реализуется
путем сравнения результатов обработки
входного напряжения с некоторым порогом.
В случае превышения порога приниматся
решения о наличии цели.
Из википедии:
Передающее устройство РЛС излучает энергию не непрерывно, а кратковременно, строго периодически повторяющимися импульсами, в паузах между которыми происходит приём отражённых импульсов приёмным устройством той же РЛС. Таким образом, импульсная работа РЛС даёт возможность разделить во времени мощный зондирующий импульс, излучаемый передатчиком и значительно менее мощный эхо-сигнал. Измерение дальности до цели сводится к измерению отрезка времени между моментом излучения импульса и моментом приёма, то есть временем движения импульса до цели и обратно.
16. Если у тебя 16 вопрос-значит ты единорос!
17. Вероятность правильного обнаружения и ложной тревоги. Отношение правдоподобия. Вероятность правильного обнаружения d:
Вероятность правильного обнаружения – вероятность принятия решения о наличии цели при условии, что цель действительно есть.
Вероятность правильного обнаружения задана в техническом задании и равна D = 0,5.
Вероятность ложной тревоги f.
Вероятность ложной тревоги – вероятность принятия решения о наличии цели при ее отсутствии.
Вероятность ложной тревоги задана в техническом задании и равна F = 10-9.
Отношение правдоподобия
Поступающая на вход обнаружителя смесь представляет собой сумму напряжений сигнала и помехи или напряжение одной помехи . Необходимо оптимально вынести решение о наличии или отсутствии сигнала. Рассмотрим процесс в одном сечении и обозначим . Пусть Wп(u) – плотность вероятности при отсутствии сигнала, Wсп(t) – плотность вероятности при наличии сигнала (рис. 2.1).
Введем решающую функцию A(u), которая может принимать значения 1 и 0 и определяется как , если сигнал есть, и , если сигнала нет. Область присутствия сигнала (u1, u2) на рис. 2.1 задана условно. Решающая функцияA(u) определяет область интегрирования при определении условных вероятностей: , .
Подставим эти значения в весовой критерий:
,
где – отношение правдоподобия (ОП), показывающее, насколько правдоподобнее предположение о наличии сигнала и помехи, чем альтернативное предположение о наличии одной помехи.
Выберем решающую функцию так, чтобы весовая разность была максимальной. Поскольку Wп(u) как плотность вероятности неотрицательна при любых u, то наибольшее значение интеграла достигается при наибольшей величине произведения . Если , то большим является значение , достигаемое при решении , предпочтительном в данном случае. Если , то большим является значение 0, достигаемое при решении . Если , то выбор решения несущественен. Условие оптимизации двухальтернативного обнаружения принимает поэтому вид:
Таким образом, оптимальный обнаружитель должен вычислять отношение правдоподобия и сравнивать его с пороговым уровнем (порогом) обнаруженияl0. ОП вычисляется при всех критериях обнаружения. Различие между критерием идеального наблюдателя и критерием Неймана – Пирсона состоит в выборе величины порога обнаружения l0. В случае трехальтернативного обнаружения (критерия Вальда) ОП сравнивается с двумя порогами: l1, и l2.
В случае непрерывной реализации используется функция
Структурная схема оптимального обнаружителя представлена на рис. 2.2, где ВУ – вычислительное устройство, ПУ – пороговое устройство, l0 – пороговый уровень обнаружения. Выходная величина обнаружителя соответствует решению «да» или «нет». Структура обнаружителя не зависит от выбираемого значения l0. От выбора l0 зависит вероятность ложной тревоги F.
В процессе обнаружения может вычисляться любая монотонная функция ОП, называемая достаточной (решающей) статистикой. Обычно используется логарифмическая зависимость: .