

2.2. Свободные колебания материальной точки
Свободные колебания происходят под действием постоянной системы сил и восстанавливающей силы.
Для получения дифференциальных уравнений колебательного движения точки воспользуемся расчетной схемой, приведенной на рис. 2.1,б.
Согласно рис. 2.1,б на точку действует постоянная система сил (G, N) и восстанавливающая сила Fyn. Дифференциальные уравнения движения точки имеют вид:
m = ΣFiоy + ΣRiоy = – Fyn = – cΔ = – cy;
m![]() =
ΣFiоz
+ ΣRiоz
= – G
+ N.
=
ΣFiоz
+ ΣRiоz
= – G
+ N.
В
Рис. 2.2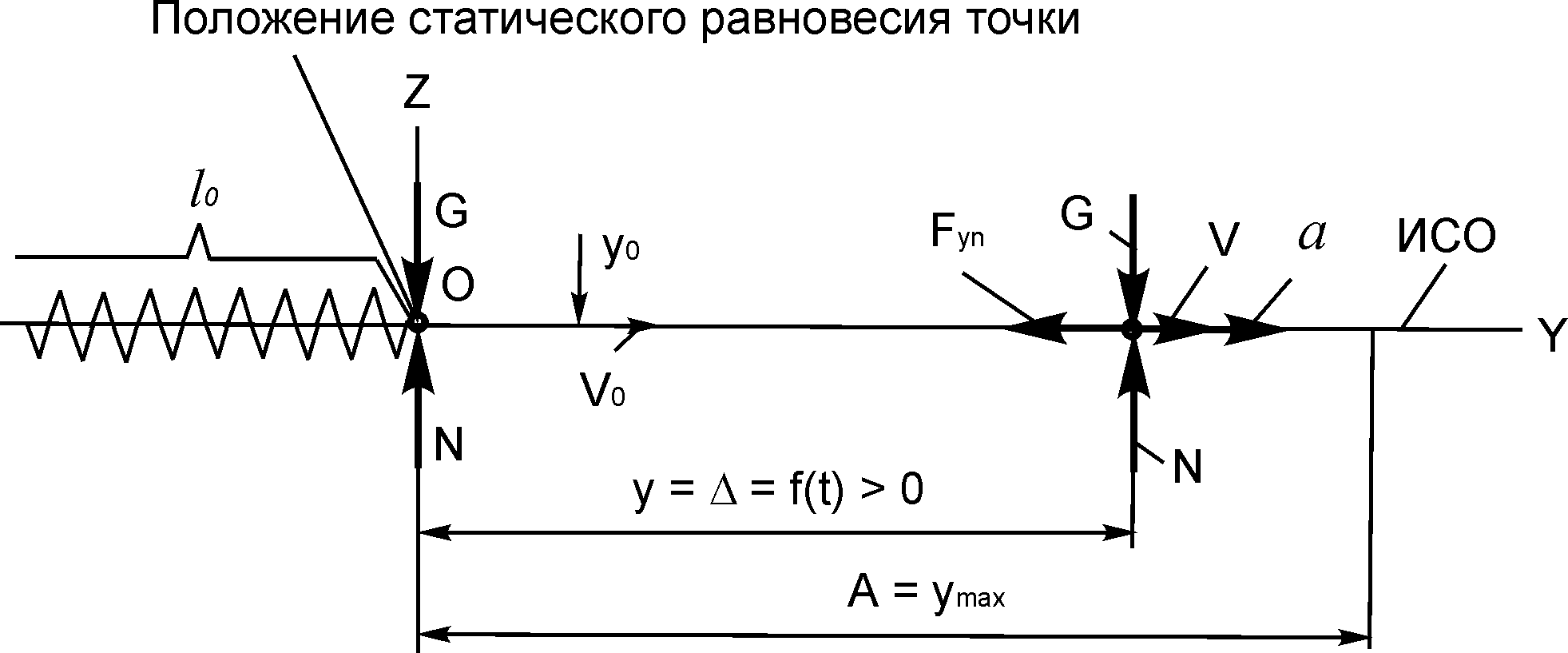
Дифференциальное уравнение горизонтального движения точки представим в виде
+ (c/m)у = 0.
Введем
постоянный коэффициент k2
= c/m
или
![]() .
Тогда имеем
.
Тогда имеем
+ k2y = 0.
Это выражение называют дифференциальным уравнением свободных колебаний материальной точки.
Коэффициент k называют циклической частотой свободных колебаний, который измеряют в рад/с или в с-1. Физический смысл коэффициента k – число полных колебаний за время t = 2π = 6,28 c.
Общее решение этого дифференциального уравнения имеет два вида.
Первый вид:
y = C1coskt + C2sinkt,
где С1, С2 – постоянные интегрирования, определяемые по начальным условиям движения.
Пусть при t0 = 0 точка имеет координату y0 и проекцию скорости V0 на ось ОY. Тогда уравнение свободных колебаний точки получит вид
y = y0coskt + ( /k)sinkt.
Второй вид:
y = Asin(kt + β),
где А и β – постоянные интегрирования; А – амплитуда свободных колебаний; (kt + β) – фаза колебаний; β – начальная фаза колебаний.
По заданным начальным условиям движения точки (y0, ) постоянные интегрирования определяют по следующей совокупности формул:
![]() ;
sinβ = y0/A;
cosβ =
/(Ak);
tgβ = ky0/
.
;
sinβ = y0/A;
cosβ =
/(Ak);
tgβ = ky0/
.
Н
Рис. 2.3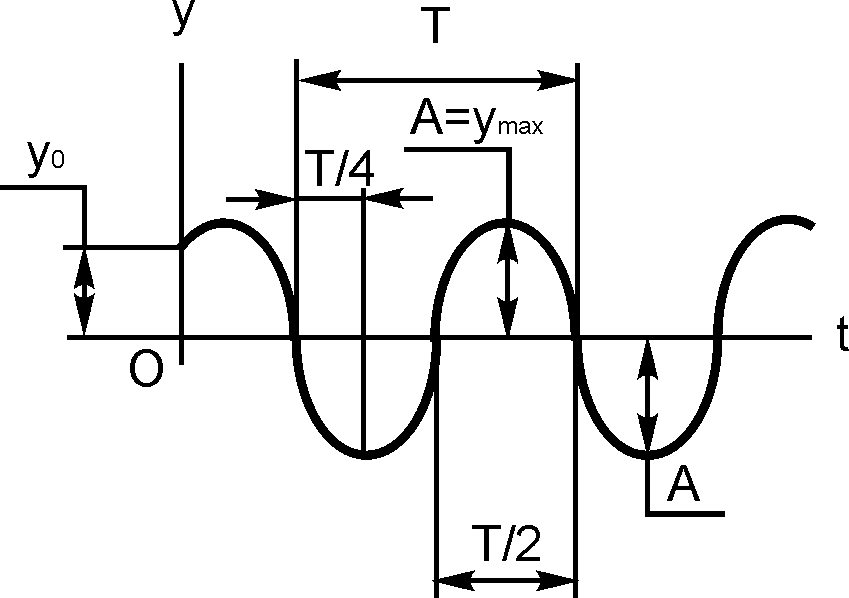
При изучении свободных (гармонических) колебаний широко используют понятия «амплитуда А», «период Т свободных колебаний».
Амплитуда свободных колебаний – величина наибольшего отклонения точки от положения статического равновесия.
Период свободных колебаний – отрезок времени, за который точка проходит положение статического равновесия в одном и том же направлении.
Период свободных колебаний определяют по формуле
T
= 2π/k
= 2π/![]() .
.
Анализ формулы показывает, что период свободных колебаний Т является постоянной величиной. С возрастанием массы m точки период Т увеличивается и соответственно уменьшается при увеличении коэффициента «с» жесткости пружины.
Следует отметить, что свободные колебания не затухают.
Для практических расчетов рекомендуется использовать формулу
y = Asin(kt + β).
В инженерной практике довольно часто рассматривают колебательное движение тела, подвешенного на пружинах или установленного на них. Если начало системы отсчета поместить в положение статического равновесия груза, то эти колебания также сводятся к свободным колебаниям точки, дифференциальное уравнение движения которой имеет стандартный вид + k2y = 0 и, следовательно, стандартное решение.