

Московский ордена Ленина, ордена Октябрьской Революции
и ордена Трудового Красного Знамени
государственный технический университет им Н.Э. Баумана
Кафедра «Многоцелевые гусеничные машины и мобильные роботы»
Домашнее задание №2 по курсу:
«Методы расчета и проектирования трансмиссий ГМ»
Вариант № 43
Студент (Тараторкин А. И.) Группа СМ9-103
Преподаватель (Харитонов С.А.)
2012 г.
Домашнее задание по курсу:
«Методы расчета и проектирования трансмиссий гм» вариант № 43
По заданной кинематической схеме планетарной коробки передач:
1. Построить план угловых скоростей звеньев, приняв за единицу измерения угловую скорость ведущего вала (ω0=1).
2. Для всех целесообразных передач, в том числе для режима торможения ведомого вала, определить:
а) По плану угловых скоростей
передаточные отношения ПКП.
б) ПО УРАВНЕНИЯМ КИНЕМАТИЧЕСКИХ СВЯЗЕЙ ВЫЧИСЛИТЬ
передаточные отношения ПКП;
угловые скорости основных звеньев;
относительные угловые скорости сателлитов;
значения К.П.Д.
Результаты вычислений свести в таблицу №1
3. Для всех целесообразных передач, в том числе для режима торможения ведомого вала, определить:
моменты, воспринимаемые звеньями и элементами управления, приняв за единицу измерения момент на ведущем валу (М0=1), а в режиме торможения момент на ведомом валу (Мх=1).
Значения моментов на каждой передаче свести в таблицу №2.
4. Для всех целесообразных передач, в том числе для режима торможения ведомого вала:
построить схемы потоков мощности.
При написании отчета использование Matcad запрещено.
|
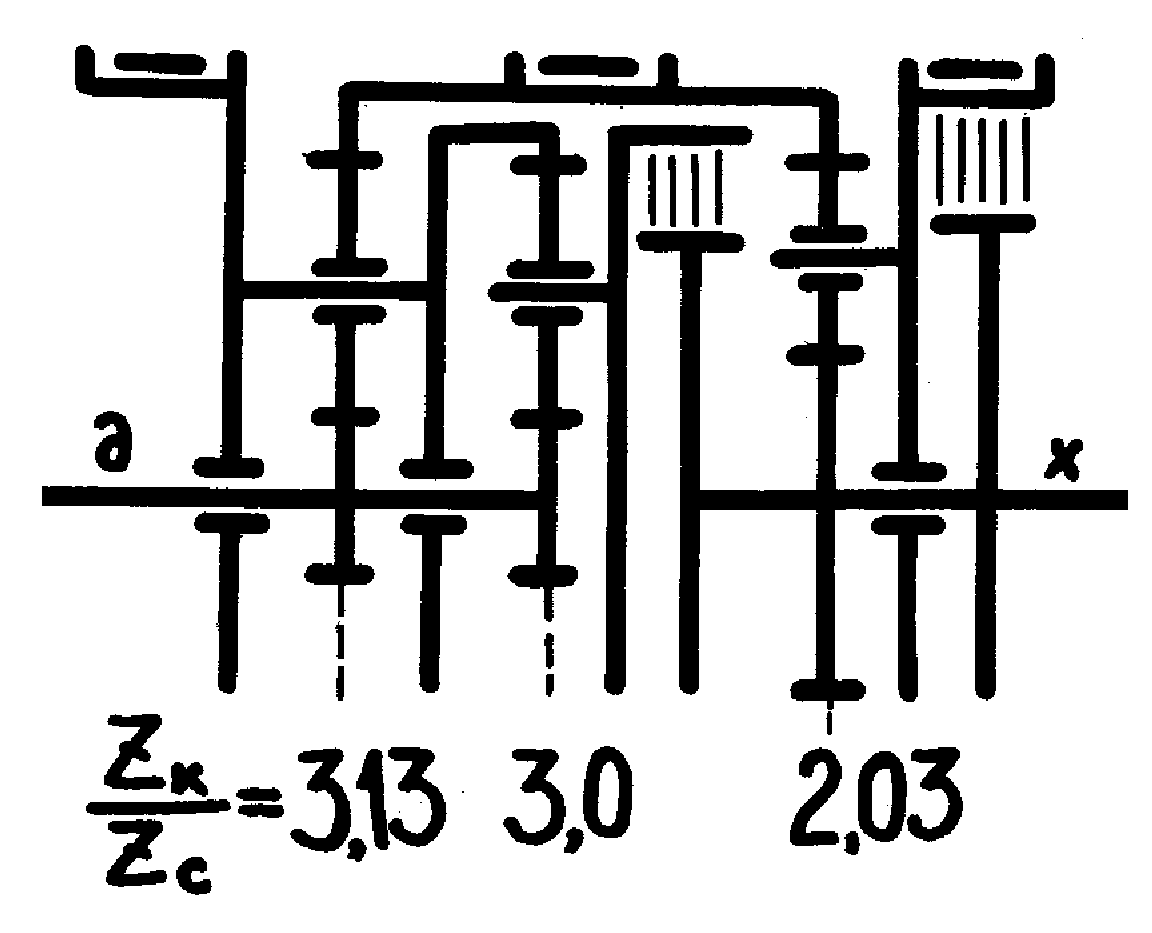
В данной кинематической схеме всем звеньям присвоены порядковые номера в соответствии с рисунком 1.
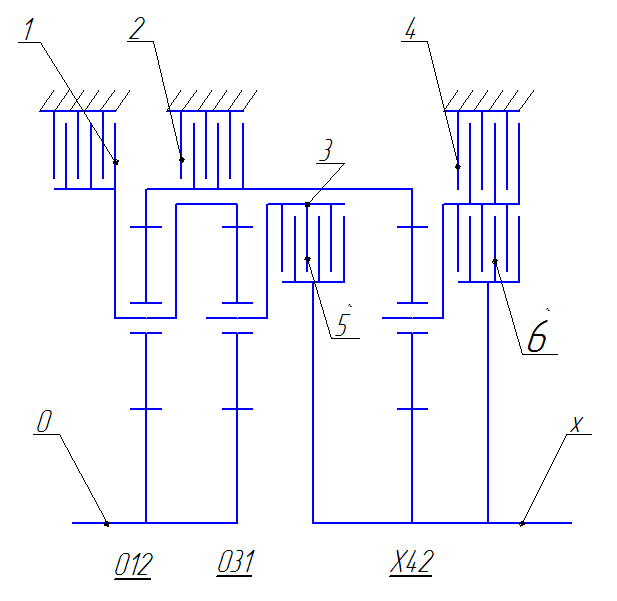
Рис.1 Кинематическая схема
Таким
образом данная кинематическая схема
состоит из следующих планетарных рядов
и блокировочных муфт: 012( ),
031(
),
031( ),
х42(
),
х42( );
);
 ,
,
 .
.
Построение плана угловых скоростей звеньев
ПР х42: в качестве осей координат выбираем прямые 4 и х. Для построения прямой звена 2 строим вспомогательную прямую через точку «е» параллельно звену 4 (так как звено 4 является водилом в этом ряду). Тогда, исходя из первого способа определения внутреннего передаточного отношения, можно записать:
Тогда в соответствии с рисунком 2 имеем:

ПР 012: в этот ряд входит ведущее звено 0, поэтому два других звена должны быть параллельны между собой. Звено 2 получено выше. Звено 1 строим параллельно звену 2, причем звено 1 располагается дальше от масштабной точки «е», чем 2, так как звено 1 водило. Кроме того, поскольку ведущее звено 0 является МЦК в этом ряду, то расстояние между водилом и БЦК должно быть меньше, чем расстояние между БЦК и масштабной точкой «е». Таким образом, можно записать:

Тогда в соответствии с рисунком 2 имеем:
 .
.
ПР 031: в этот ряд входит ведущее звено 0, поэтому два других звена должны быть параллельны между собой. Звено 1 получено выше. Звено 3 строим параллельно звену 1, причем звено 3 располагается дальше от масштабной точки «е», чем 1, так как звено 3 водило. Кроме того, поскольку ведущее звено 0 является МЦК в этом ряду, то расстояние между водилом и БЦК должно быть меньше, чем расстояние между БЦК и масштабной точкой «е». Таким образом, можно записать:

Тогда в соответствии с рисунком 2 имеем:
 .
.
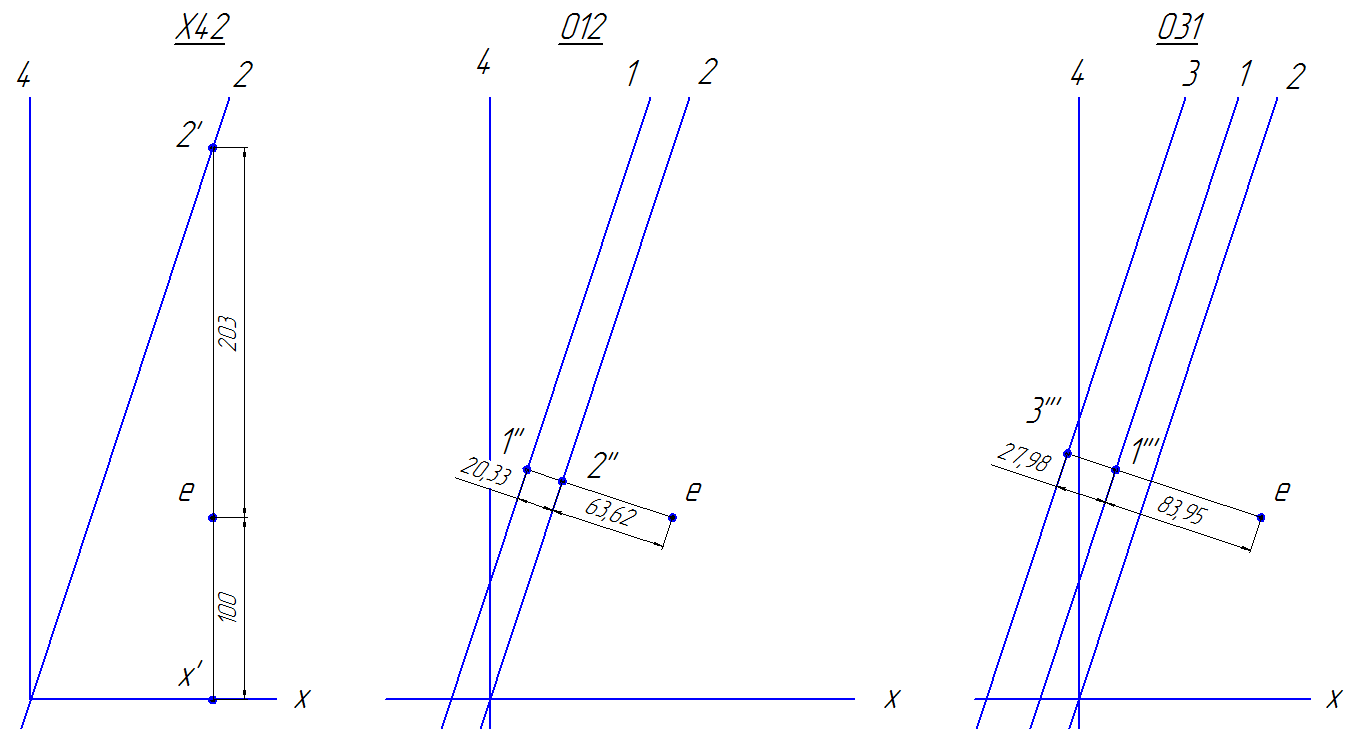
Рис.2 Построение плана угловых скоростей планетарных рядов
Для построения отображения блокировочной муфты достаточно провести прямую через масштабную точку «е» и точку пересечения прямых (3х); для муфты аналогично через масштабную точку «е» и точку пересечения прямых (4х). Результаты построения представлены на рисунке 3.

Рис. 3 План угловых скоростей
Как следует из рисунка 3, получено 8 рабочих точек, из которых две (s и t) соответствуют заднему ходу и шесть (a, b, c, e, f, g) соответствуют переднему ходу. Однако, исходя из условия неразрывности силового потока, целесообразно использовать два варианта включения передач переднего хода: abfg и abce. Кроме того, точки g и t не удастся реализовать, поскольку в схеме рассматриваемой коробки передач не предусмотрен тормоз звена 3. Таким образом, в дальнейших расчётах будут рассмотрены передачи переднего хода, соответствующие рабочим точкам a(I), b(II), c(III), e(IV), и передача заднего хода, соответствующая рабочей точке s(ЗХ).