

Глава 8. Электроприводы механизмов специального назначения
§ 8.1. Общая характеристика механизмов специального назначения
Электроприводы механизмов специального назначения ( ЭСН ) делят на 2 группы:
электроприводы, улучшающие мореходные качества судов;
электроприводы, выполняющие технологические операции, специфические для данно-
го типа судна.
К первой группе ЭСН относятся:
подруливающие устройства;
успокоители качки.
Ко второй группе относятся:
системы кренования и дифферента;
системы откренивания судов;
автоматические буксирные лебёдки.
Подруливающие устройства предназначены для повышения манёвренности судов. С их помощью судно может перемещаться лагом (бортом ) и даже совершать полный оборот на месте.
Системы успокоителей качки применяют, в основном, на пассажирских судах и морских паромах, в условиях, когда качка достигает 35.. .40°. Предназначены для умень-
шения амплитуды качки судов и , таким образом, повышения их остойчивости.
Системы кренования и дифферента применяют на ледокольных судах, для борьбы с за-
жатием льдами корпуса судна во льдах и придания корпусу судна необходимой осадки. С их помо-
щью можно раскачивать судно с борта на борт или изменять осадку ( например, подвсплывать ) и тем самым освобождать корпус судна, зажатый во льдах.
Системы откренивания судна применяют на судах с горизонтальным способом по-
грузки ( суда типа ро-ро ) для выравнивания крена. Применение этих систем повышает без
опасность грузовых операций и обеспечивает надёжность работы въездной аппарели.
Автоматические швартовные лебёдки( АШЛ ) применяют на судах любых типов для обеспечения постоянного натяжения швартовных канатов в условиях, когда изменяется осадка судна.
Последнее возможно при приливах и отливах, а также при погрузке и выгрузке судна. На некоторых типах судов они могут одновременно использоваться как якорно-швартовные устройст-
ва, т.е. для работы как со швартовными, так и с якорными канатами (т.е. для подъёма и спу-
ска якорей).
Автоматические буксирные лебедки ( АБЛ ) применяются на специализирован-
ных судах – буксирах, для буксировки плавсредств – других судов, плашкоутов, лихтеров и т.п.
§ 8.2. Подруливающие устройства
Основные сведения
Подруливающие устройства предназначены для повышения манёвренности судна при проходе каналов и узкостей, а также при подходе к причалу.
Эти устройства позволяют судну двигаться бортом ( лагом ), разворачиваться на месте, менять курс на малых ходах и значительно уменьшать радиус развороТ судна.
Эти устройства представляют собой цилиндрическую трубу ( туннель ), располо-
женную в плоскости миделя ( т.е. в поперечной плоскости корпуса судна ) и свободно со-
общающуюся с водой. Внутри трубы находится винт с приводным электродвигателем.
При работе электродвигателя винт создаёт поперечную силу ( упор ), направлен-
ную перпендикулярно корпусу судна.
Подруливающие устройства обычно устанавливают в носовой части судна, при их работе нос судна уходит вправо или влево относительно курса. На крупных судах могут быть несколько подруливающих устройств, расположенных по всей длине судна.
Эти устройства используют винты двух видов:
с фиксированным шагом ( ВФШ );
с регулируемым шагом ( ВРШ ).
Угол поворота лопастей ВФШ не изменяется.
Угол поворота лопастей ВРШ можно изменять, что приводит к изменению тяги.
При этом скорость электродвигателя винта не изменяется, что значительно упрощает схе-
му управления ВРШ.
Для управления ПУ применяют электрические, электрогидравлические и реже пне-
вматические системы управления.
Устройство подруливающего устройства с ВРШ
Кинематическая схема подруливающего устройства приведена на рис. 293.
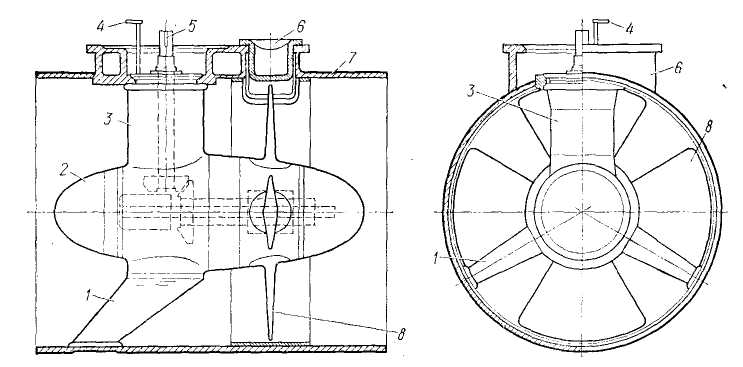
Рис. 293. Подруливающее устройство с винтом регулируемого шага :
К основным деталям устройства относятся:
1 – кронштейны ( 2 ), для крепления устройства к стенкам туннеля;
2 – обтекатель, для уменьшения сопротивления винта потоку воды;
3 – корпус подруливающего устройства;
4 – рычаг серводвигателя преобразователя шага винта ( угла разворота лопастей );
5 – вертикальный вал, для передачи вращающего момента от электродвигателя к винту;
6 – люк для смены лопастей;
7 – туннель;
8 – поворотная лопасть винта.
Подруливающее устройство находится в туннеле 7 в носовой части судна и подвешено на двух кронштейнах 1.
Винт вращается двумя электродвигателями через редуктор ( не показан ), вертикаль
ный вал 5 и коническую передачу ( на рис. 1 показана пунктиром в средней части ).
Устройство для изменения шага винта показано на функциональной схеме ( рис. 280 )
Функциональная схема электропривода подруливающего устройства с ВРШ
Функциональная схема электропривода подруливающего устройства с ВРШ приве-
дена на рис. 294.
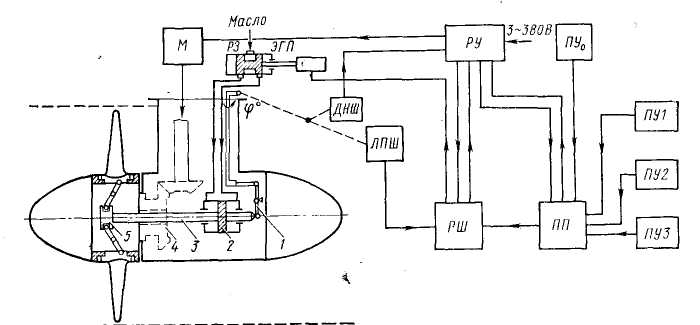
Рис. 294. Функциональная схема электропривода подруливающего устройства:
К основным деталям устройства относятся:
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопа-
стей винта в пропорциональное напряжение ;
ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контак-
ты которого замкнуты только при нулевом шаге лопастей винта;
М – приводной электродвигатель винта, для вращения винта;
ПП – переключатель постов управления;
ПУ1- пост управления на крыле левого борта;
ПУ2 – то же, в рулевой рубке;
ПУ3- то же, на крыле левого борта;
ПУ0 – то же, в ЦПУ;
РУ – распределительное устройство ( щит электропитания );
РШ – регулятор шага винта, для выработки напряжения, пропорционального задава
емому углу поворота лопастей ВРШ;
ЭГП – реверсивный электрогидравлический преобразователь;
РЗ – распределительный золотник;
1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ;
2 – сервомотор, для создания усилия, поворачивающего лопасти винта;
3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5;
4 – коническая зубчатая передача, для передачи вращающего момента электродви-
гателя на ступицу винта ( т.е. для вращения винта );
5 – редуктор, устройство для непосредственного разворота лопастей винта.