

ВСТУП
Рівень фахової кваліфікації інженера визначається не тільки вмінням виконувати поставлені завдання, застосовуючи сучасні методи дослідження, а й здатністю надавати достовірний, перевірений результат в якомога більш загальному вигляді.
Достовірність результату можна забезпечити, проаналізувавши розмірності складових в отриманих співвідношеннях, але це дозволяє знайти тільки частку можливих помилок. Повністю достовірний результат може бути отриманий тільки після вирішення поставленої задачі принципово іншим методом, в разі, коли отримані результати стовідсотково співпадають.
Дані методичні рекомендації спрямовані на формування у студента розуміння того беззаперечного факту, що вирішення будь-якої задачі різними методами, коли вони застосовані коректно, приводить до одного й того ж результату. Кожен з методів краще (компактніше, скоріше і т.п.) вирішує певний клас задач (знаходження активних сил, реакцій в’язей, законів руху точок і твердих тіл і т. і.), і гірше пристосований для вирішення інших задач. Але зважаючи на те, що рішення реальних задач потребує стовідсоткової вірогідності, спеціаліст повинен вміти застосовувати всі доступні йому методи вирішення задачі.
Методичні вказівки відносяться до частини ІІІ теоретичної механіки “Динаміка. Основи аналітичної механіки”, та охоплює розділи “Основні теореми динаміки. Теорема при зміну кінетичної енергії механічної системи”, ”Метод кінетостатики”, ”Динаміка твердого тіла”, ”Принцип можливих переміщень і принцип Д’Аламбера-Лагранжа”, “Рівняння Лагранжа другого роду”. Крім того, в методичних вказівках повторюються відомості із статики та кінематики, що є необхідними для розуміння матеріалу, який викладається.
Предметною основою матеріалу методичної розробки є сформульована в [1, стор.231-236] розрахунково-графічна робота “Застосування теореми про зміну кінетичної енергії для вивчення руху механічної системи”. В ній необхідно знайти прискорення тіла, що здійснює поступальний рух в складі механічної системи з заданими масо-габаритними характеристиками, яка починає рухатись із стану спокою. Відмінними особливостями методичних вказівок є те, що
1) в розрахунковій роботі треба знайти кінематичний параметр, вказаний в таблиці – це може бути поступальне прискорення тіла; кутове прискорення тіла, що обертається навколо нерухомої вісі; кутове прискорення тіла, що рухається плоскопаралельно, чи прискорення його центру мас. Це суттєво розширює кількість варіантів, що дозволяє кожному студенту працювати індивідуально,
2) результат – прискорення - представляється в аналітичній формі, тобто у вигляді формули, отримання якої здійснюється без будь-яких спрощуючих співвідношень між масами, величинами радіусів і т.і. Чисельні дані серед вхідних параметрів відсутні, дані наведені тільки в “літерному” вигляді,
3) крім теореми про зміну кінетичної енергії механічної системи в методичних вказівках для отримання необхідного результату використовуються
- принцип Д’Аламбера-Лагранжа;
- рівняння Лагранжа 2 роду;
- метод кінетостатики.
Отримана всіма чотирма різними методами формула для визначення заданого завданням кінематичного параметру повинна повністю співпадати з отриманою іншими методами.
ЗАВДАННЯ
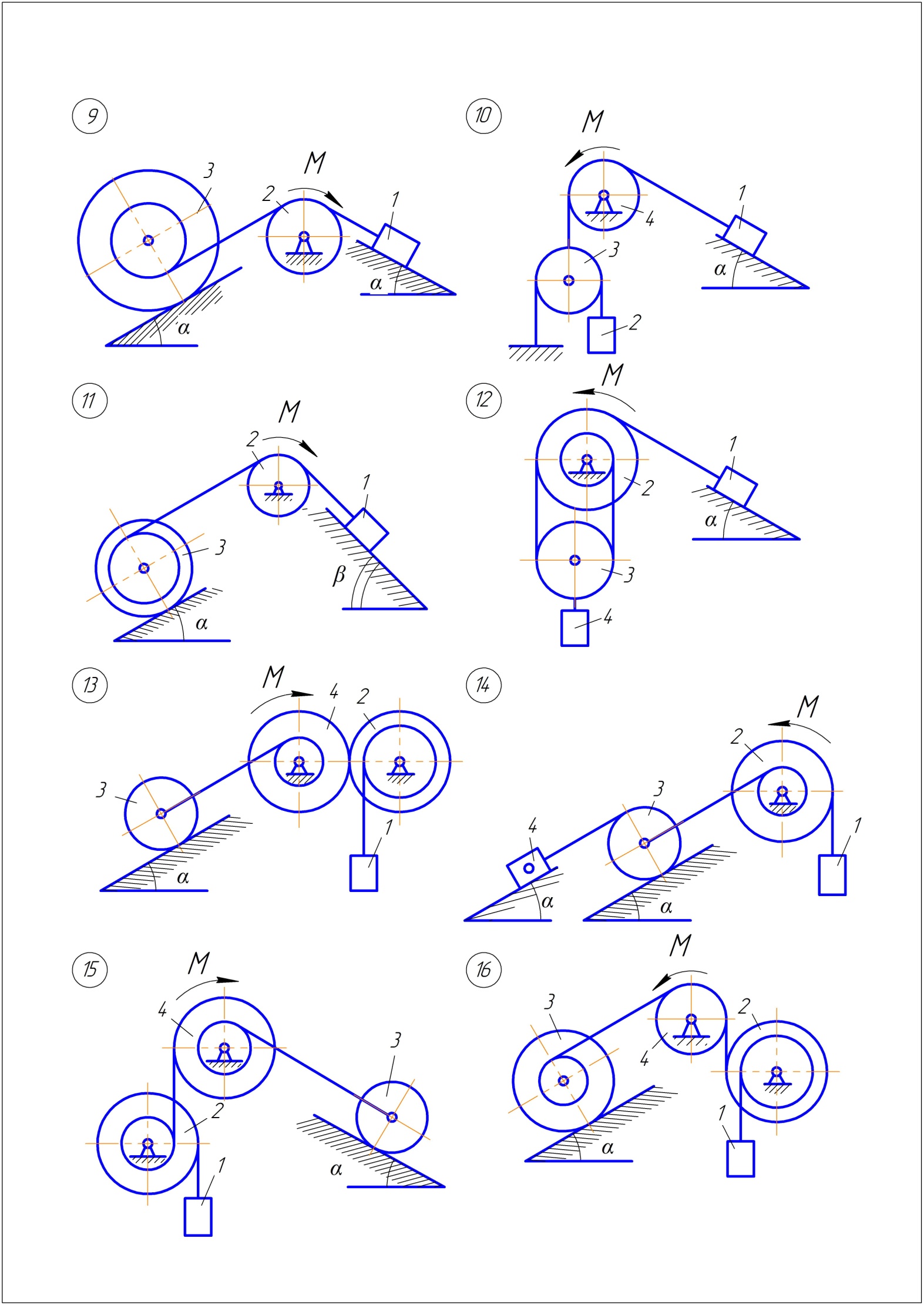
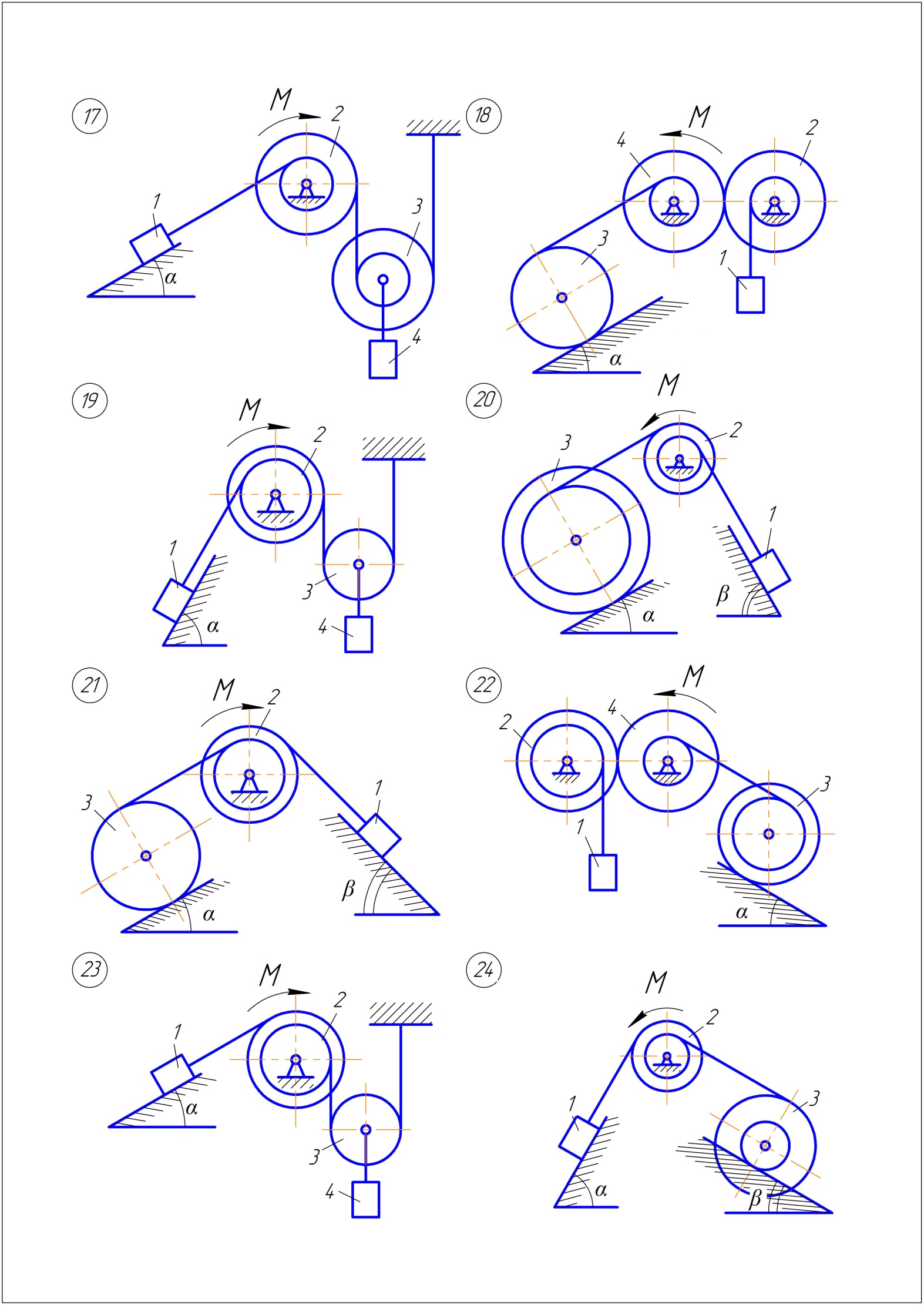
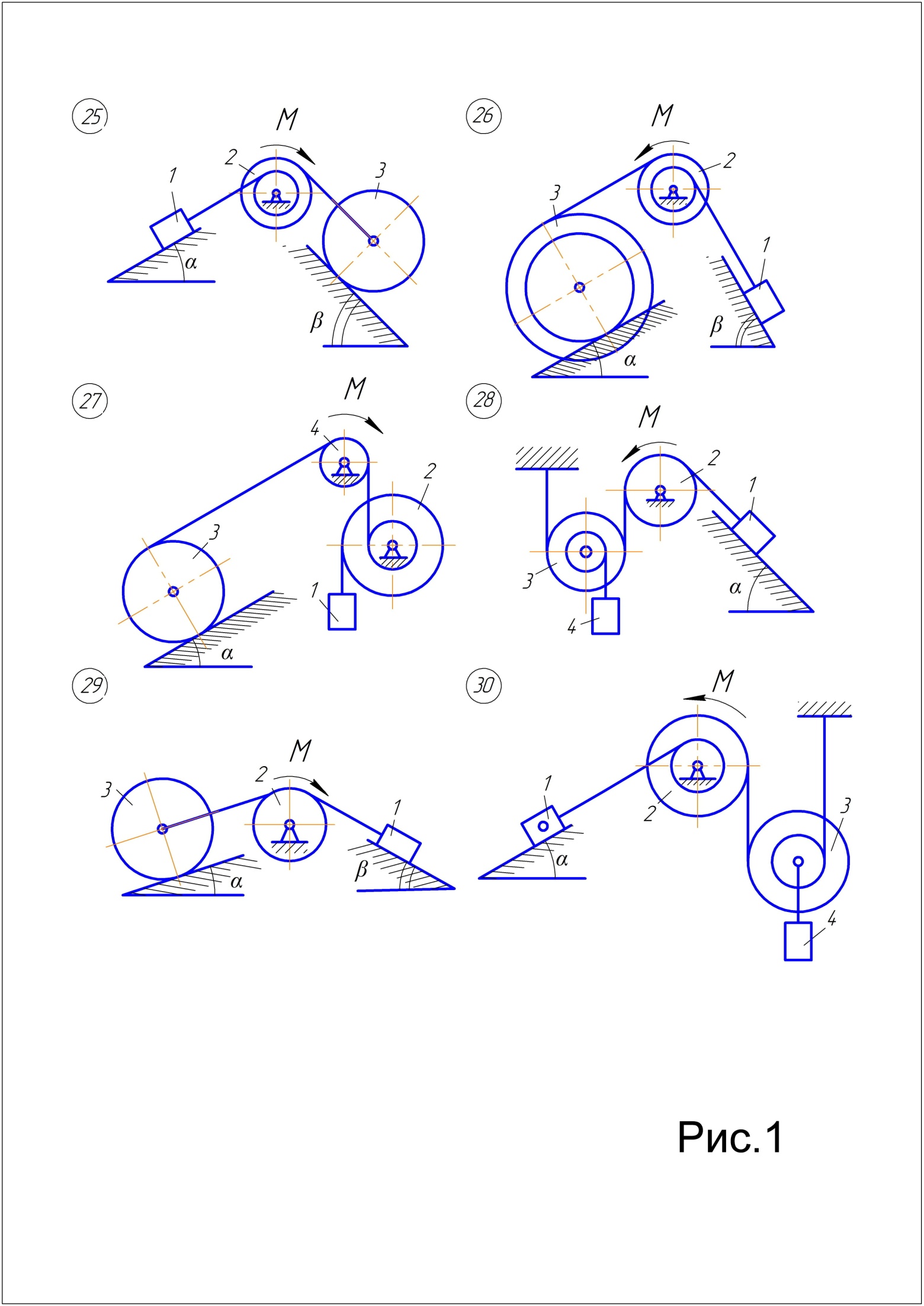
Механічна система, зображена на малюнку (рис.1), являє собою декілька тіл, зв’язаних між собою невагомими нерозтяжними нитками. Вона починає рухатись із стану спокою під дією сил ваги, а також момента пари сил, прикладеного до диска з нерухомою віссю обертання.
Вважаємо відомими:
маси всіх тіл –

радіуси дисків –

радіуси інерції східчастих дисків

кути
 і
і
 нахилу похилих площин відносно площини
горизонту;
нахилу похилих площин відносно площини
горизонту;коефіцієнт тертя ковзання
 тіл,
що здійснюють поступальний рух по
нерухомим поверхням (безрозмірний);
тіл,
що здійснюють поступальний рух по
нерухомим поверхням (безрозмірний);коефіцієнт тертя кочення
 тіл, що котяться без ковзання по нерухомим
поверхням (розмірність – метр).
тіл, що котяться без ковзання по нерухомим
поверхням (розмірність – метр).
Треба знайти кінематичний параметр, вказаний в таблиці 1. Табл.1
Варіант |
Кінематичний параметр, що його треба знайти |
||||
a |
b |
c |
d |
e |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|
|
8 |
|
|
|
|
|
9 |
|
|
|
|
|
10 |
|
|
|
|
|
11 |
|
|
|
|
|
12 |
|
|
|
|
|
13 |
|
|
|
|
|
14 |
|
|
|
|
|
15 |
|
|
|
|
|
16 |
|
|
|
|
|
17 |
|
|
|
|
|
18 |
|
|
|
|
|
19 |
|
|
|
|
|
20 |
|
|
|
|
|
21 |
|
|
|
|
|
22 |
|
|
|
|
|
23 |
|
|
|
|
|
24 |
|
|
|
|
|
25 |
|
|
|
|
|
26 |
|
|
|
|
|
27 |
|
|
|
|
|
28 |
|
|
|
|
|
29 |
|
|
|
|
|
30 |
|
|
|
|
|







В таблиці 1 параметр
 - прискорення тіла, що рухається
поступально, чи прискорення центру мас
диска, що котиться нерухомою поверхнею,
- прискорення тіла, що рухається
поступально, чи прискорення центру мас
диска, що котиться нерухомою поверхнею,
 - кутове прискорення тіла, що обертається
навколо нерухомої вісі чи здійснює
плоскопаралельний рух.
- кутове прискорення тіла, що обертається
навколо нерухомої вісі чи здійснює
плоскопаралельний рух.

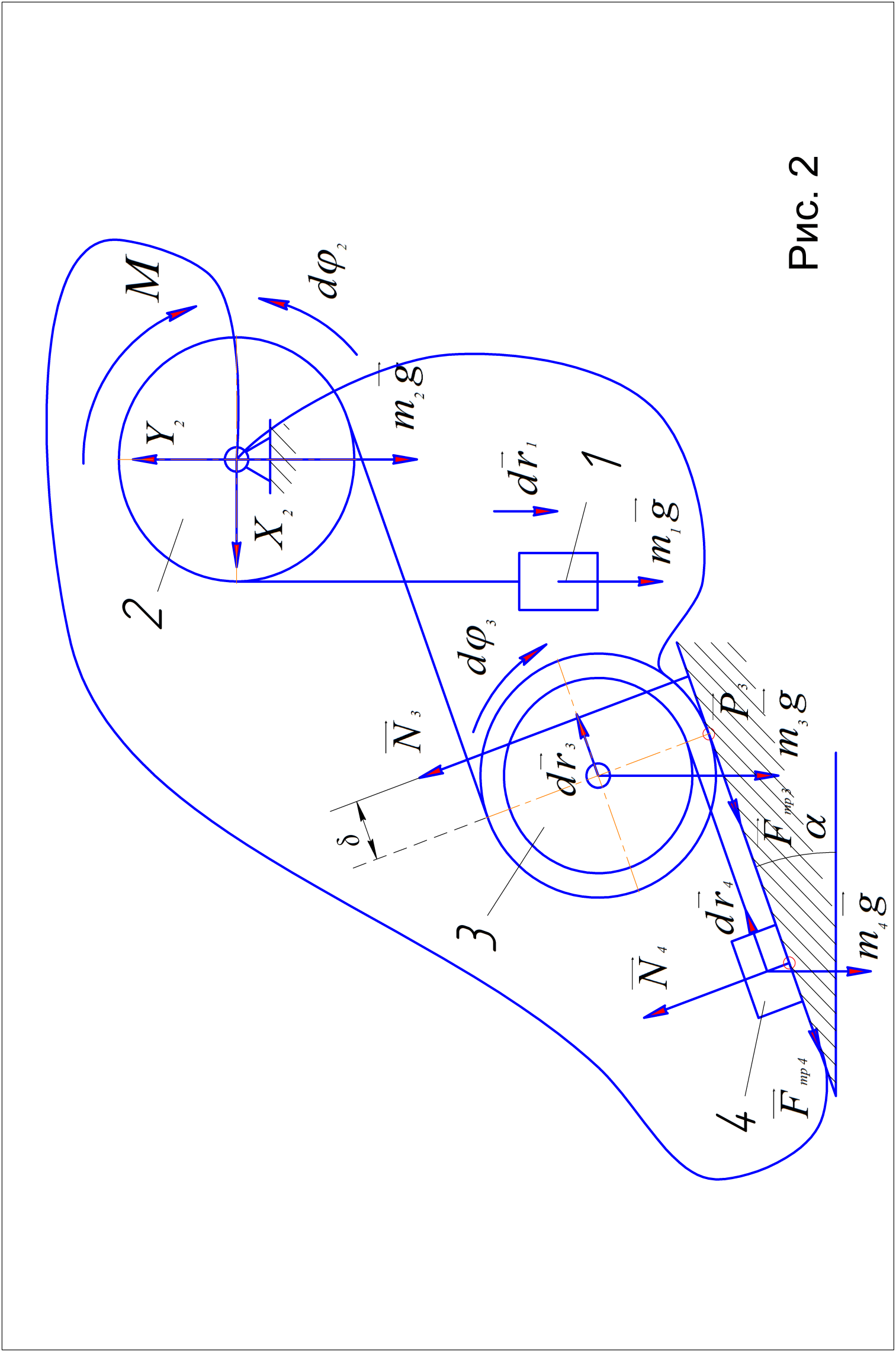
ПРИКЛАД (рис.2)
Вантаж 1 масою прикріплений до кінця невагомої
нерозтяжної нитки, перекинутої через
однорідний диск 2 масою
прикріплений до кінця невагомої
нерозтяжної нитки, перекинутої через
однорідний диск 2 масою
 та радіусом
та радіусом
 і навитої на східчастий диск загальною
масою
і навитої на східчастий диск загальною
масою
 та радіусами ступенів
та радіусами ступенів
 та
та
 .
Радіус інерції східчастогодиска відносно
горизонтальної вісі, що проходить
перпендикулярно до площини малюнка
через його центр мас, дорівнює
.
Радіус інерції східчастогодиска відносно
горизонтальної вісі, що проходить
перпендикулярно до площини малюнка
через його центр мас, дорівнює
 .
Рухаючись вертикально, вантаж 1 змушує
східчастий диск 3 котитися без ковзання
по похилій площині з кутом нахилу до
горизонту
.
.
Рухаючись вертикально, вантаж 1 змушує
східчастий диск 3 котитися без ковзання
по похилій площині з кутом нахилу до
горизонту
.
Коефіцієнт тертя кочення диска 3 похилою площиною - .
На менший радіус
диска
3 також навита невагома нерозтяжна
нитка, що переміщує по цій же похилій
площині вантаж 4 масою
 з коефіцієнтом тертяковзання
.
До диску 2 прикладений момент пари сил
з коефіцієнтом тертяковзання
.
До диску 2 прикладений момент пари сил
 навколо вісі його обертання.
навколо вісі його обертання.
В початковий момент часу ця
механічна система знаходилась в стані
спокою. Після зняття гальм
система почала рухатись під дією сил
ваги складових елементів
 та моменту пари сил M.
та моменту пари сил M.
Знайти лінійне прискорення вантажу1.
Задачу можна розв’язати декількома методами.
Теорема про зміну кінетичної енергії матеріальної системи.
Згідно цієї теореми приріст кінетичної енергії матеріальної системи за певний проміжок часу дорівнює сумі робіт зовнішніх та внутрішніх сил, що діють на точки матеріальної системи
У виразі (1.1)
кінетична енергія
 =0
, тому що в початковий момент часу система
знаходилась в стані спокою. Робота
внутрішніх сил також дорівнює нулю,
оскільки ми вважаємо, що тіла 1,2,3 та 4 в
процесі руху не деформуються, а отже ми
маємо справу з незмінною системою
абсолютно твердих тіл. Тоді (1.1) має
вигляд
=0
, тому що в початковий момент часу система
знаходилась в стані спокою. Робота
внутрішніх сил також дорівнює нулю,
оскільки ми вважаємо, що тіла 1,2,3 та 4 в
процесі руху не деформуються, а отже ми
маємо справу з незмінною системою
абсолютно твердих тіл. Тоді (1.1) має
вигляд
Почнемо з правої частини виразу (1.2), тобто з суми робіт зовнішніх сил, що діють на точки матеріальної системи:

Проаналізуємо
ці зовнішні сили. Для цього треба подумки
укласти матеріальну систему в замкнутий
об’єм. Зовнішні сили –
це сили взаємодії між тілами всередині
цього замкнутого об’єму, та тілами, що
знаходяться поза ним. Отже, по-перше,
зовнішні сили – це сили ваги
.
По-друге, це – реакції в’язей, які деяким
чином обмежують рух цих тіл. Для тіла 2
це – реакції циліндричного шарніру
 та
та
 .
.
Для того, щоб вказати напрямок дії реакцій в’язей для тіл 3 і 4, треба припустити, що система рухається в одному з можливих напрямків. Якщо припустити, що тіло 1 рухається донизу, то диск 2 – обертається проти стрілки годинника, східчастий диск 3 переміщується вправо догори та обертається за стрілкою годинника, а тіло 4 рухається вправо вгору по нерухомій площині ( покажемо напрямки руху стрілками).
Відповідно до вказаних
напрямків руху реакція нерухомої
поверхні при русі по ній східчастого
диску 3 складається [2] з сили тертя
кочення
 ,
прикладеної в миттєвому центрі швидкостей
і спрямованої проти напрямку руху, та
нормальної складової
,
прикладеної в миттєвому центрі швидкостей
і спрямованої проти напрямку руху, та
нормальної складової
 ,
зміщеної в напрямку руху на величину
(
коефіцієнт тертя кочення).
,
зміщеної в напрямку руху на величину
(
коефіцієнт тертя кочення).
Сила реакції поверхні при
русі тіла 4 складається з нормальної
складової та сили тертя ковзання
та сили тертя ковзання ,
спрямованої проти напрямку руху, модуль
якої за Кулоном дорівнює:
,
спрямованої проти напрямку руху, модуль
якої за Кулоном дорівнює:

Величини сил нормальних
реакцій
та
отримаємо, спроєцювавши всі сили,
 напрямку їх руху. Враховуючи те, що рух
у цьому напрямку – відсутній, отримаємо:
напрямку їх руху. Враховуючи те, що рух
у цьому напрямку – відсутній, отримаємо:
 та
та
 .
.
Елементарна робота сил, прикладених до твердого тіла, дорівнює:
 (1.3)
(1.3)
де
 та
та
 -
головний вектор та головний момент
навколо центру зведення сил, що діють
на тверде тіло;
-
головний вектор та головний момент
навколо центру зведення сил, що діють
на тверде тіло;
 та
та
 -
елементарні поступальне та обертальне
переміщення центру зведення сил.
-
елементарні поступальне та обертальне
переміщення центру зведення сил.
Елементарна робота сил, що діють на матеріальну систему, що розглядається, дорівнює:
 (1.4)
(1.4)
Позначивши елементарне
переміщення тіла 1, що здійснюється у
напрямку стрілки, як
 ,
маємо
,
маємо
 =
= ,
Тіло 2 здійснює обертальний
рух проти стрілки годинника. Коли воно
повернется на елементарний кут
,
Тіло 2 здійснює обертальний
рух проти стрілки годинника. Коли воно
повернется на елементарний кут
 ,
момент, прикладений до нього, виконає
роботу:
,
момент, прикладений до нього, виконає
роботу:

( роботи сил та дорівнюють нулю, оскільки сили прикладені до нерухомої точки).
Для того, щоб визначити
елементарну роботу сил, прикладених до
тіла 3, зведемо цю систему сил до миттєвого
центру швидкостей (точка
 ).
Тоді, знаючи, що миттєвий центр швидкостей
– нерухомий, отримаємо
).
Тоді, знаючи, що миттєвий центр швидкостей
– нерухомий, отримаємо
 у вигляді роботи головного моменту сил
при обертанні навколо точки
на елементарний кут
у вигляді роботи головного моменту сил
при обертанні навколо точки
на елементарний кут
 :
:
 (1.5)
(1.5)
(сила тертя кочення проходить через нерухому точку та роботи не виконує).
Елементарна робота сил, що
діють на тіло 4, на переміщенні
 дорівнює
дорівнює
 .
(1.6)
.
(1.6)
Отже, елементарна робота сил, що діють на матеріальну систему, дорівнює

(1.7)
Матеріальна система, що розглядається, має один ступінь вільності, отже – переміщення, які здійснюють елементи цієї системи, є однозначно взаємозалежними. Ця взаємозалежність має вид наступних рівностей:
 =
= (1.8)
(1.8)
Тоді, підставивши співвідношення (1.8) в вираз (1.7), маємо:
 =
=
 .
(1.9)
.
(1.9)
Вважаючи, що тіло 1 з початкового
до кінцевого моменту часу пройшло
відстань
 ,
повна робота зовнішніх сил, прикладених
до точок матеріальної системи буде
дорівнювати:
,
повна робота зовнішніх сил, прикладених
до точок матеріальної системи буде
дорівнювати:

Тепер обчислимо кінетичну енергію системи T, яку вона набула за цей же проміжок часу. Кінетична енергія системи складається з
- кінетичної енергії поступального руху тіл 1 і 4
 ;
;
 (1.11)
(1.11)
де
 та
та
 - лінійні швидкості цих тіл;
- лінійні швидкості цих тіл;
- кінетичної енергії обертального руху диску 2
 (1.12)
(1.12)
де
 осьовий момент інерції диску 2 відносно
вісі, що проходить через центр мас та
співпадає з віссю обертання,
осьовий момент інерції диску 2 відносно
вісі, що проходить через центр мас та
співпадає з віссю обертання,
 - кутова швидкість обертання диску 2;
- кутова швидкість обертання диску 2;
- кінетичної енергії плоскопаралельного руху східчастого диску 3, яка за теоремою Кеніга обчисляється як сума кінетичної енергії поступального руху тіла разом з центром мас та кінетичної енергії обертального руху тіла навколо центру мас:
 +
+
 .
(1.13)
.
(1.13)
де
 - лінійна швидкість центру мас диску
3,
- лінійна швидкість центру мас диску
3,
 - кутова швидкість обертання
диску 3,
- кутова швидкість обертання
диску 3,
 - момент інерції східчастого
диску 3 відносно його центру мас,
- момент інерції східчастого
диску 3 відносно його центру мас,
- радіус інерції східчастого диску 3.
Неважко побачити ( пересвідчитись в цьому рекомендуємо студентам самостійно), що розглядаючи плоскопаралельний рух диску 3 як миттєво-обертальний навколо миттєвої вісі обертання, яка проходить через миттєвий центр швидкостей (точка ), кінетична енергія тіла 3 може бути записана у вигляді
 . (1.14)
. (1.14)
де за теоремою Штейнера
 .
.
Отже, кінетична енергія матеріальної системи дорівнює:
 =
=
 .
(1.15)
.
(1.15)
Вище було зазначено, що
оскільки система має одну ступінь
вільності, то лінійні і кутові швидкості
її складових взаємозалежні. Ця залежність
може бути отримана з співвідношень
(1.8). Дійсно, маючи на увазі, що елементарні
поступальні
 і обертальні
і обертальні
 переміщення тіл, здійснені за елементарний
проміжок часу
переміщення тіл, здійснені за елементарний
проміжок часу
 ,
є ніщо інше, як поступальні
,
є ніщо інше, як поступальні
 і обертальні
і обертальні
 швидкості, маємо:
швидкості, маємо:
 ;
;
 ;
;
 .
(1.16)
.
(1.16)
З урахуванням (1.16) вираз (1.15) отримає вигляд:

 (1.17)
(1.17)
Прирівнюючи вирази (1.10) та (1.17), отримаємо:
 =
=
= (1.18)
(1.18)
Пам’ятаючи,
що матеріальна система, рух якої
розглядається, є незмінною, стверджуємо
що вирази в квадратних дужках в (1.18)
є константами. Позначивши коефіцієнт
при
 через
через
 ,
а коефіцієнт при
через
,
а коефіцієнт при
через
 ,
перепишемо (1.18) так:
,
перепишемо (1.18) так:
 (1.19)
(1.19)
Візьмемо похідну за часом від виразу (1.19)
 (1.20)
(1.20)
Оскільки
 (1.21)
(1.21)
то остаточно прискорення дорівнює:
 (1.22)
(1.22)
чи
 .
.
(1.23)
Перевіряючи розмірність
складових в чисельнику і знаменнику
(1.23), бачимо, що всі складові
в чисельнику мають розмірність сили
[H], а в знаменнику
– розмірність маси [кг]
Отже, розмірність виразу в
правій частині (1.23) –
лінійне прискорення [ ].
].
Для варіантів, де треба знайти будь-який інший кінематичний параметр, кінетичну енергію і роботу треба виражати через відповідні змінні. Якщо в прикладі, який розглядається, треба знайти кутове прискорення східчастого диску 3, то:
- співвідношення між переміщеннями тіл аналогічно виразу (1.8) треба виразити через :
 =
= (1.24)
(1.24)
тоді елементарна робота
 згідно виразу (1.7) буде з
урахуванням (1.24) виглядати
так:
згідно виразу (1.7) буде з
урахуванням (1.24) виглядати
так:

= ,
(1.25)
,
(1.25)
а повна робота зовнішніх
сил, прикладених до точок
матеріальної системи, по аналогії з
(1.10) на
кутовому переміщенні
 тіла 3 буде дорівнювати
тіла 3 буде дорівнювати

- співвідношення між кутовими і лінійними швидкостями тіл, аналогічно виразу (1.16), повинні бути виражені через :
 (1.27)
(1.27)
тоді кінетична енергія матеріальної системи, по аналогії з (1.17), буде мати вигляд:

= , (1.28)
, (1.28)
- позначаючи коефіцієнт при
 в виразі (1.28) як
в виразі (1.28) як
 ,
а коефіцієнт при
в виразі (1.26)
як
,
а коефіцієнт при
в виразі (1.26)
як
 ,
маємо
,
маємо
 (1.29)
(1.29)
і остаточно
 тобто:
тобто:
 =
=

звідки очевидно, що
 (1.31),
(1.31),
Що співпадає з рівністю, яку можна отримати, якщо взяти похідну за часом від першого з рівнянь (1.27).