

Планирование и управление в условиях неопределенности и риска. Модели и методы интервального программирования
Следует повторить
определение выпуклого множества, конуса, выпуклого конуса,
необходимое и достаточное условие выпуклости конуса, определение крайнего вектора для выпуклого конуса, конической оболочки, многогранного конуса.
Нормаль
Активные, пассивные ограничения
Правила сравнения интервалов
Элементы интервальной математики
Обозначим
[b]=[b-,b+] - числовой интервал,
[b] – интервальная переменная,
[f(x)]={f-(x)<=
f(x)<=f+(x)}
![]() -
интервальная функция,
-
интервальная функция,
[A]=([aij]) – интервальная матрица.
Здесь
![]() - неизвестная функция,
- неизвестная функция,
![]() - известные точно заданные границы
коридора ее возможных значений.
- известные точно заданные границы
коридора ее возможных значений.
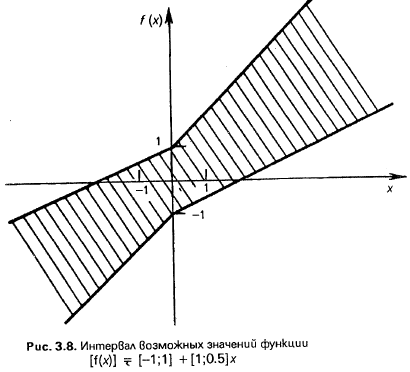
Пример: f(x)]=[-1,1]+[0.5,1]x; f--(x)=min{[-1,1]+[0.5,1]x}, f+(x)=max{[-1,1]+[0.5,1]x}.
Варианты описания интервальной функции см. в рукописи.
С заданной абсолютной ошибкой
С заданной относительной ошибкой
Параметрическая модель с интервально заданными коэффициентами
При
умножении интервала
![]() на
на
![]() меняется знак границ интервала и сами
границы меняются местами:
меняется знак границ интервала и сами
границы меняются местами:
![]()
Задачи интервального программирования с линейными ограничениями.
Пусть
неизвестны точные значения параметров
![]() порождающей задачи линейного
программирования и возможным реализациям
этих параметров нельзя приписать функцию
распределения внутри известных границ.
порождающей задачи линейного
программирования и возможным реализациям
этих параметров нельзя приписать функцию
распределения внутри известных границ.
Задача интервального программирования имеет вид:
Модели ограничений.
Рассмотрим возможные модели допустимой области
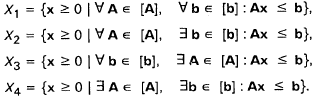
X1 – самая жесткая постановка, X4 – наиболее «либеральная».
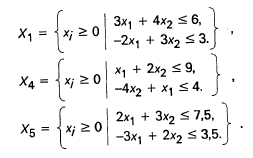
Учитывая неотрицательность переменных x>=0, можно выразить множества Xi через граничные элементы интервальной матрицы [A] и интервального вектора [b] (получить детерминированные эквиваленты моделей ограничений)

X5={x>=0:
![]() x<=
x<=![]() },
где
=(b++b-)/2
},
где
=(b++b-)/2
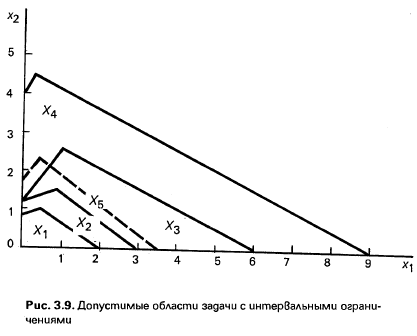
Из анализа экстремальных допустимых областей следуют включения:
![]() .
.
Пример.
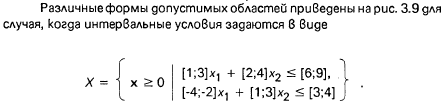
Приведенные выражения
позволяют, используя содержательную
интерпретацию и технологические
требования к допустимому решению
определить детерминированную допустимую
область задачи в форме одного из множеств
![]() ,
уже не
охватывающего интервально заданные
параметры.
,
уже не
охватывающего интервально заданные
параметры.
Модели критерия.
В качестве целевой функции можно взять любую функцию, удовлетворяющую условию
![]() .
(*)
.
(*)
Ее вид зависит от специфики оптимизируемой системы и информации о виде функции.
Утверждение 1. При любом выборе f(x) согласно условию (*) вариация экстремального значения критерия ограничена пределами
![]() ,
(1*)
,
(1*)
где
 .
.
Доказательство. Для
![]() выполнено (*). Покажем, что
выполнено (*). Покажем, что
min f(x) = f(x0)<= f+(x0+)=min f+(x).
От противного. Пусть выполнено обратное:
min f(x) > min f+(x),
Тогда для
![]() f(x)
> min
f+(x)=
f+(x0+).
Возьмем x=x0+:
f(x0+)>f+(x0+),
что противоречит (*). Значит, (1*) верно.
Аналогично доказывается f(x0-)<=
f(x0).
Утверждение
доказано.
f(x)
> min
f+(x)=
f+(x0+).
Возьмем x=x0+:
f(x0+)>f+(x0+),
что противоречит (*). Значит, (1*) верно.
Аналогично доказывается f(x0-)<=
f(x0).
Утверждение
доказано.
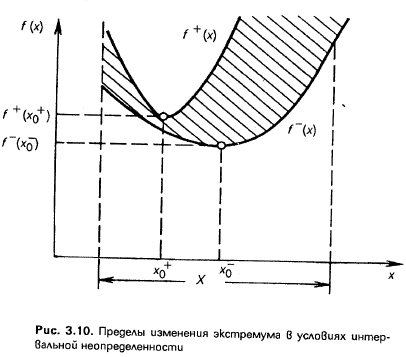
Рис. Иллюстрация к утверждению 1.
Упражнение. Сформулируйте и докажите аналог утверждения 1 для задачи на максимум.
Возможные варианты модели критериев:
1 MaxMin модель (пессимистический подход). Применяется, когда необходимо обеспечить гарантированный результат:
max
f(x)->min, f
![]() [f(x)],
x
X,
X1={x>=0:
[f(x)],
x
X,
X1={x>=0:
![]() A,b
Ax<=b}.
A,b
Ax<=b}.
Эта
постановка ориентирована на наихудший
случай, особенно в случае допустимой
области
![]()
2 MinMin модель (оптимистический похдход), (минимальная из возможных моделей критериев):
minf(x)->min,
f
[f(x)],
x
X,
X4={x>=0:
![]() A
[A],
b
[b]
Ax<=b}.
A
[A],
b
[b]
Ax<=b}.
Если
использовать область
![]() ,
то буде получено минимально возможное
значение критерия.
,
то буде получено минимально возможное
значение критерия.
3
постановка в среднем:
![]() ,
,
Наиболее естественно использовать Х5.
многокритериальная задача: f1(x)->min, … , fm(x)->min, fi(x) [f(x)]. Далее можно использовать любые методы решения многокритериальной задачи.
Добавить из рукописи