

9.3 Расчет индуктивного первичного преобразователя перемещений
В качестве материала для магнитной цепи при питании преобразователя напряжением частотой 50 Гц рекомендуется для Ш- и П- образных магнитопроводов применять листовую сталь Э12; Э21; Э31; Э41 для цилиндрических магнитопроводов – прутковую сталь типа Армко марок 10 и 35.
Для повышенных частот питания преобразователей применяют материалы, обладающие очень большими удельными электрическими сопротивлениями: листовой хромистый или молибденовый пермаллой или прессованные сердечники из окислов некоторых материалов - так называемые ферриты.

Рисунок 9.4. Схема Ш-образной магнитной цепи индуктивного преобразователя. I, II, III, IV – участки магнитопровода.
Расчет преобразователя основан на том, что по заданным габаритным размерам преобразователя определяют все его параметры.
Требования, в соответствии с которыми разрабатывается и рассчитывается первичный измерительный преобразователь:
- диапазон измерения 0,1-0,2 мм;
- чувствительность преобразователя 100-150 Ом/мм;
- допустимая степень нелинейности 1%;
- допустимая плотность тока 2-2,5 А/мм2;
- частота питающего напряжения 50 Гц;
- допустимое измерительное усилие не более 3Н.
При несоответствии результатов расчета заданным выше требованиям изыскивают пути их приближения посредством изменения входных параметров, исходя из разработанной конструктивной схемы. В других случаях принимают решение о создании дополнительных усилительных устройств.
Расчет начинают с принципиального построения магнитной цепи и обмоток преобразователя, исходя из заданных габаритных размеров. Магнитная цепь обычно выполняется симметричной относительно среднего сердечника, на котором расположена катушка (изображена жирными линиями). Поэтому достаточно рассчитать одну ее половину, уменьшив сечение среднего сердечника вдвое и сохранив ту же величину намагничивающей силы катушки.
Определим начальный
зазор δ0
между якорем
и катушками индуктивности. При
конструировании магнитопровода, особенно
из сплошной стали, необходимо учитывать,
что при слишком большой ширине полюса
а (рисунок 9.5) и малом зазоре
![]() магнитный поток будет вытеснен к краям
полюса и под средней частью полюса
практически не пройдет. При увеличении
зазора
сопротивление его будет мало изменяться,
так как увеличение сопровождается
увеличением фактической площади зазора
S,
что снижает чувствительность.
магнитный поток будет вытеснен к краям
полюса и под средней частью полюса
практически не пройдет. При увеличении
зазора
сопротивление его будет мало изменяться,
так как увеличение сопровождается
увеличением фактической площади зазора
S,
что снижает чувствительность.

Рисунок 9.5 Магнитное поле в зазоре между широкими полюсами
Поэтому рекомендуется выбирать из условия:
![]() .
(9.4)
.
(9.4)
Перемещение чувствительного элемента и допустимая степень нелинейности характеристики преобразователя также определяют начальной зазор между якорем и неподвижным сердечником катушек преобразователя, который выберем из условия:
![]() (9.5)
(9.5)
Таким образом, δ0 выбирается исходя из двух условий.
В этом случае нелинейность характеристики дифференциальных преобразователей регулировкой может быть доведена до 1%, а недифференциальных до 10%.
Выберем f0 - коэффициент заполнения из таблицы 9.2, зависящий от диаметра провода и вида изоляции и соответствующий марке провода.
Таблица 9.2 - Сортамент эмалированных проводов
Марка провода |
Коэффициент заполнения |
ПЭВ-1, ПЭЛ ПЭВ-2 ПЭЛШО |
0,60 0,55 0,50 |
Для проведения дальнейшего расчета выберем d - диаметр провода катушки преобразователя без изоляции, мм; рекомендуется катушки наматывать проводом высокого качества (марок ПЭЛШО, ПЭВ-2 и др.) из таблицы 9.3.
Таблица 9.3 - Сортамент эмалированных проводов
Диаметр провода без изоляции d, мм |
Сечение голого провода q, мм2 |
Диаметр провода с изоляцией, мм |
|||
ПЭЛ |
ПЭВ-1 |
ПЭВ-2 |
ПЭЛШО |
||
0,05 0,06 0,07 0,08 0,09 0,1 0,11 0,12 0,13 0,14 0,15 |
0,00196 0,00283 0,00385 0,00502 0,00687 0,00785 0,00950 0,0113 0,0132 0,0158 0,0176 |
0,065 0,075 0,085 0,095 0,105 0,12 0,13 0,14 0,15 0,16 0,17 |
- 0,085 0,095 0,105 0,115 0,125 0,135 0,145 0,155 0,165 0,18 |
- 0,09 0,10 0,11 0,12 0,13 0,14 0,15 0,16 0,17 0,19 |
0,12 0,13 0,14 0,15 0,16 0,175 0,185 0,195 0,205 0,215 0,225 |
Рассчитаем площадь, занимаемую обмоткой катушки Q:
![]() ,
(9.6)
,
(9.6)
где
n – толщина стенок каркаса, выбирается в пределах 1-2 мм;
m – зазор между поверхностью катушки и сердечником, выбирается в пределах 2 - 3мм.
По известной площади окна магнитопровода, предназначенного для размещения катушки, с учетом каркаса катушки определим количество витков:
![]() .
(9.7)
.
(9.7)
Магнитное поле в зазоре не является плоскопараллельным, магнитный поток выпучивается из-под полюсов, поэтому при расчете применяют метод разбивки магнитного поля на простые геометрические фигуры (рисунок 9.6, таблица 9.4).

Рисунок 9.6 Картина магнитного поля в воздушном зазоре Ш-образного преобразователя. Условные обозначения:
X’, X’’, Z’a, Z’’a, Z’b, Z’’b – координаты выпучивания магнитного поля;
δІІ ,δVІ – воздушные зазоры между сердечником и магнитопроводом;
1 – половина полого цилиндра, фигура 4 таблицы 9.4;
2 – половина цилиндра, фигура 2 таблицы9. 4;
3 – квадрант полого шара, фигура 7 таблицы 9.4;
4 – шаровый квадрант, фигура 6 таблицы 4;
5 – магнитное поле под полюсами, фигура 1 таблицы 9.4;
6 – четверть цилиндра, фигура 3 таблицы 9.4;
7 – четверть полого цилиндра, фигура 5 таблицы 9.4;
8 – квадранты сложной формы, заключенные между фигурами 6,7 и 1,2, фигура 8 таблица 9.4.
Определим максимальный зазор δmax и минимальный зазор δmin, возникающие между катушками и магнитопроводом вследствие его передвижения:
δmax = +/2; (9.8)
δmin = –/2. (9.9)
Определим параметры катушки при наибольшем зазоре.
Координаты
выпучивания магнитного поля
![]() определим по графику, показанному на
рисунке 9.7, с учетом приведенных ниже
рекомендаций.
определим по графику, показанному на
рисунке 9.7, с учетом приведенных ниже
рекомендаций.
Таблица 9.4 Основные фигуры магнитного поля и аналитическое выражение их магнитных проводимостей
Эскиз объемной фигуры магнитного поля |
Формула магнитной проводимости |
прямоугольный параллелепипед |
|
полуцилиндр |
|
четверть цилиндра |
|
половина полого цилиндра |
|
четверть полого цилиндра |
|
сферический квадрант |
|
половина сферического квадранта |
|
квадрант сферической оболочки |
|
половина квадранта сферической оболочки |
|
тело вращения (полуцилиндр) |
|
тело вращения (полукольцо) |
|
тело вращения (четверть цилиндра) |
|
тело вращения (четверть кольца) |
|





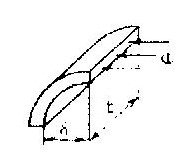

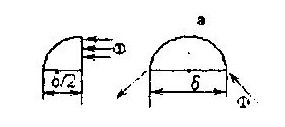








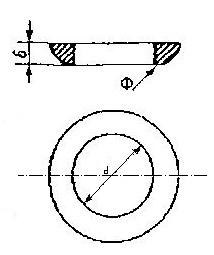



Рисунок 9.7 Зависимость между координатами поля выпучивания
Координата![]() обычно принимается равной
обычно принимается равной
![]() .
.
Из рисунка 9.7 по
известной
![]() определим
определим
![]() и
и
![]() .
.
По
![]() (т.к. Z’a=Z’’a=Z’’b
= t)
с помощью рисунка определим
(т.к. Z’a=Z’’a=Z’’b
= t)
с помощью рисунка определим
![]() и
и
![]() .
.
Магнитную
проводимость воздушных зазоров
![]() ,
,![]() определим
как сумму магнитных проводимостей
фигур, их составляющих (таблица 9.4).
определим
как сумму магнитных проводимостей
фигур, их составляющих (таблица 9.4).
Для зазора
![]() проводимость составит:
проводимость составит:
 .
(9.10)
.
(9.10)
где
![]()
Для зазора
![]() проводимость составит:
проводимость составит:
 (9.11)
(9.11)
где m1 – средняя толщина стенки половины полого цилиндра (фигура 4 таблицы 9.4)
![]() ,
,
m2 – средняя толщина стенки четверти полого цилиндра (фигура 5 таблицы 9.4)
 .
.
При расчете магнитной цепи, удобно использовать схемы замещения. Схема замещения (рисунок 9.8) составлена сообразно конфигурации магнитопровода. Все участки магнитных сопротивлений цепи на схеме обозначены сосредоточенными магнитными сопротивлениями, а магнитодвижущая сила F катушки К показана как источник потока.

Рисунок 9.8 Схема замещения магнитной цепи индуктивного преобразователя
Так как рассматриваемая
цепь симметрична, условно примем, что
сопротивление среднего сердечника
состоит из двух равных параллельно
включенных магнитных сопротивлений
![]() и двух равных сопротивлений воздушных
зазоров
и двух равных сопротивлений воздушных
зазоров
![]() .
.
Для любой половины
магнитопровода полное магнитное
сопротивление цепи
![]() будет равно сумме сопротивлений остальных
участков цепи и сумме сопротивлений
воздушных зазоров:
будет равно сумме сопротивлений остальных
участков цепи и сумме сопротивлений
воздушных зазоров:
![]() .
(9.12)
.
(9.12)
Но поскольку мы пренебрегаем величинами сопротивлений сердечников, то:
![]() ,
(9.13)
,
(9.13)
где
 ;
(9.14)
;
(9.14)
 .
(9.15)
.
(9.15)
Суммарное магнитное сопротивление всей цепи составит (порядка 105 Ом):
 .
(9.16)
.
(9.16)
Определим активное (омическое) сопротивление катушки преобразователя (порядка сотен Ом):
![]() ,
(9.17)
,
(9.17)
где
![]() -
удельное сопротивление для медной
проволоки;
-
удельное сопротивление для медной
проволоки;
![]() – средняя
длина витка, м (рисунок 9.9);
(9.18)
– средняя
длина витка, м (рисунок 9.9);
(9.18)
q – поперечное сечение полого провода, мм (таблица 9.3).

Рисунок 9.9 – Схема расположения катушки на сердечнике индуктивного преобразователя.
По найденной
величине
![]() определим модуль полного электрического
сопротивления катушки преобразователя:
определим модуль полного электрического
сопротивления катушки преобразователя:
 ,
(9.19)
,
(9.19)
где
![]() - круговая частота;
(9.20)
- круговая частота;
(9.20)
![]() =50
Гц – частота.
=50
Гц – частота.
Чтобы уменьшить влияние изменения характеристик магнитного материала на параметры катушек, индукцию В выберем из условия В=0,2-0,6 Т, такой, при которой магнитная проницаемость данного материала достигает максимального значения; примем эффективное значение индукции В=0,2Т.
Рассчитаем магнитный поток в сердечнике:
![]() ,
(9.21)
,
(9.21)
где
![]() -
площадь сечения среднего сердечника.
(9.22)
-
площадь сечения среднего сердечника.
(9.22)
Определим эффективное значение тока, протекающего через катушку: преобразователя:
 .
(9.23)
.
(9.23)
Проверим катушку на допустимую плотность тока. Рекомендуется плотность тока:
![]() .
(9.24)
.
(9.24)
Определим напряжение питания катушки:
![]() .
(9.25)
.
(9.25)
Определим параметры катушки при наименьшем зазоре δmin по формулам (9.8) - (9.25).
Приближенно определим чувствительность преобразователя:
![]() ,
(9.26)
,
(9.26)
где
ΔΖ = Zmax – Zmin. (9.27)
Полученная чувствительность преобразователя должна удовлетворять условию: К=100 - 150 Ом/мм.
Рассчитаем
максимальную электромеханическую силу
притяжения
![]() ,
якоря к сердечнику:
,
якоря к сердечнику:
![]() ,
(9.28)
,
(9.28)
где
![]() -
сила притяжения
якоря к отдельному полюсу сердечника
преобразователя, полученной из формулы
Максвелла:
-
сила притяжения
якоря к отдельному полюсу сердечника
преобразователя, полученной из формулы
Максвелла:
 ,
(9.29)
,
(9.29)
![]() ,
,![]() - проводимость зазора и зазор у полюса,
силу притяжения которого можно определить.
- проводимость зазора и зазор у полюса,
силу притяжения которого можно определить.
У дифференциального преобразователя на якорь действует разность сил, направленная в сторону уменьшения зазора:
![]() .
(9.30)
.
(9.30)
Таким образом, максимальную электромеханическую силу притяжения якоря можно представить таким образом:
 (9.31)
(9.31)
Измерительное
усилие
![]() преобразователя определяют, исходя из
величины максимальной электромеханической
силы притяжения
,
якоря к сердечнику:
преобразователя определяют, исходя из
величины максимальной электромеханической
силы притяжения
,
якоря к сердечнику:
![]() .
(9.32)
.
(9.32)
Полученное
![]() по условию должно составлять не более
3Н.
по условию должно составлять не более
3Н.