

2. Анализ основных загрязнителей.
Показатели выброса загрязняющих веществ основных типов авиационных двигателей отечественного производства.
Название двигателя |
Тип двигателя |
Взлет |
Набор высоты |
Снижение |
||||||
HC |
CO |
NOx |
HC |
CO |
NOx |
HC |
CO |
NOx |
||
г/кг |
г/кг |
г/кг |
||||||||
Д-3ОКУ |
турбореактивный |
0,37 |
2,52 |
12,7 |
0,45 |
3,1 |
10,8 |
1,3 |
4,8 |
4,5 |
Д-3ОКУ-2 |
турбореактивный |
0,65 |
3,85 |
11,3 |
0,73 |
4,25 |
9,87 |
2,4 |
18,2 |
4,22 |
НК-8-2У |
турбореактивный |
0,45 |
5,5 |
13,9 |
0,53 |
6 |
12,9 |
5 |
21 |
5,4 |
НК-8-2У II серии |
турбореактивный |
0,44 |
5 |
13,8 |
0,48 |
6 |
12,3 |
14 |
22 |
5,92 |
Д-3ОКП-2 |
турбореактивный |
0,77 |
2,37 |
17,2 |
0,97 |
3,33 |
11,3 |
2,65 |
14,4 |
5,4 |
НК-86 |
турбореактивный |
0,48 |
3,92 |
12,8 |
0,56 |
4,18 |
12,2 |
1,17 |
9,3 |
5,1 |
Д-36 |
турбовентиляторный |
- |
0,53 |
67,4 |
- |
0,4 |
21 |
- |
2,87 |
11,6 |
НК-8-2У |
турбореактивный |
0,65 |
5,83 |
14 |
0,91 |
8,83 |
12,6 |
11,3 |
28 |
5,4 |
3. Метод дифференциального поглощения.
Метод дифференциального поглощения основан на явлении резонансного поглощения лазерного излучения внутри контура линии поглощения исследуемого газа. Концентрация газа вычисляется при использовании сигналов на двух близких частотах, одна из которых находится внутри линии поглощения, а другая - вне ее.
Представим, что в атмосферу посылаются импульсы от лазера, генерирующего ультрафиолетовое излучение на длинах волн 308 и 353 нанометра. Излучение на первой длине волны будет поглощаться молекулами озона более чем в тысячу раз сильнее по сравнению со второй. Поэтому сигналы их обратного рассеяния окажутся различными. Теоретические методы позволяют, сравнивая величины этих сигналов, найти концентрацию озона на выбранной высоте атмосферы. А анализируя изменение величин сигналов обратного рассеяния с высотой, можно определить и распределение концентрации молекул озона по трассе лазерного луча. И что очень важно, метод дифференциального поглощения позволяет определить уже единицы - десятки молекул газа на триллион молекул воздуха. А так как каждый газ в силу "оригинальности" собственной молекулы имеет различные участки поглощения по шкале длин волн, сейчас проводятся измерения концентрации практически всех малых газовых примесей, присутствующих в воздушном бассейне, в том числе и газов антропогенного происхождения.
Для зондирования этим методом всех загрязнителей необходимо несколько лазерных источников, перекрывающих широкий спектральный диапазон - от УФ до ИК области. Кроме того, некоторые газы имеют очень узкие линии поглощения, так что для их зондирования методом ДП требуются специфические перестраиваемые лазеры, которые должны иметь достаточно узкую линию излучения и высокую стабильность длины волны генерации.
Известно, что максимум информации при дистанционном определении состава и состояния атмосферы с высокими пространственно-временным разрешением и чувствительностью можно получить лишь оптическим методом с использованием лазеров, т. е. лидаром. Термин «лидар» является аббревиатурой английского выражения light identification, detection and ranging (оптическая идентификация, обнаружение и локация).
Большинство лидаров состоит из трех основных частей: передающей, приемной и системы управления. На рис.1 показаны элементы и принцип работы лидаров. Передающая часть лидара обычно содержит лазерный источник и оптическую систему для формирования выходного лазерного пучка, т. е. для управления размером выходного пятна и расходимостью пучка. Рассеянное в исследуемом объеме излучение собирается телескопом и регистрируется чувствительным фотоприемником. В лидарной системе необходим также элемент, осуществляющий частотную дискриминацию собираемых сигналов. Этот элемент выделяет из всего принимаемого сигнала излучение с заданной длиной волны. Таким элементом может служить интерференционный узкополосный фильтр с высоким уровнем режекции помехи, а в ряде случаев - монохроматор. Оптические сигналы после оцифровки поступают в компьютер для их обработки и сохранения.
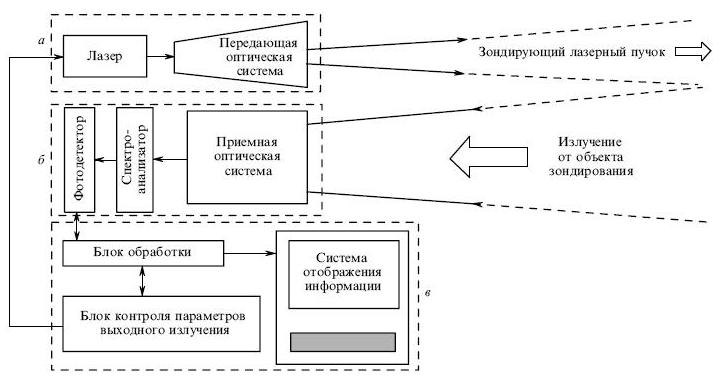
Рис. 1. Принципиальная схема лидара: передающая часть (а), приемная часть (б) и система управления (в).
Большую часть задач атмосферного зондирования, включая те, в которых присутствует дифференциальное поглощение лазерного излучения, можно описать с помощью лидарного уравнения.
В случае импульсной системы, работающей в моностатическом режиме, возрастание мощности сигнала ΔP(λ, R), воспринимаемого детектором в волновом диапазоне (λ, λ+Δλ) от элемента, расположенного в интервале (R, R+ΔR), определяется как
 (1)
(1)
Здесь J(λ, R, r) – индуцированная лазером спектральная плотность энергетической яркости на длине волны λ элемента площади объекта, положение которого определяется радиусом - вектором r в слое единичной толщины, расположенном на расстоянии R от лидара; dA (R, г) — элемент площади объекта в положении r на расстоянии R от лидара; ρ (λ,R,r)— вероятность попадания излучения с длиной волны λ, исходящего с элемента площади dA(R, r), на детектор.
На эту вероятность влияют многие факторы, включая геометрические особенности задачи, ослабляющее влияние атмосферы, оптику приемного устройства, характеристики спектрального пропускания. Большинство этих воздействий можно разделить и записать уравнение

 (2)
(2)
где A0/R2 - телесный угол, в котором осуществляется прием сигналов оптической системой (Ао — площадь линзы или зеркала объектива); T(λ,R) — коэффициент пропускания атмосферы для длины волны λ на пути R; ξ(λ)— коэффициент спектрального пропускания приемной оптической системы, который учитывает влияние селективных по спектру пропускания компонентов системы, например монохроматора; ξ (R, r) — основанная на геометрическом рассмотрении вероятность того, что излучение элемента площади поверхности объекта, положение которого определяется радиусом-вектором г и расстоянием до объекта R, достигнет детектора излучения.
Допустим, что ξ (R,r) зависит только от перекрывания области, освещаемой лазерным лучом на поверхности объекта, полем зрения фотоприемника. Тогда будем считать ξ (R,r) коэффициентом перекрытия.
На спектральную плотность энергетической яркости объекта J(λ,R,r) в значительной степени влияет характер взаимодействия лазерного излучения и среды объекта. В данном разделе будут рассмотрены упругое и неупругое рассеяние. В этом случае можно записать следующее уравнение:
 (3)
(3)
Здесь I(R,r) — поверхностная плотность потока излучения на расстоянии R в области r, а
 (4)
(4)
является объемным коэффициентом обратного рассеяния, где Ni(R, г)— концентрация центров рассеяния типа i; {dσ(λL)/dΩ}is — дифференциальное сечение рассеяния при экспонировании лазерным излучением с длиной волны λL; Li(λ)Δ λ — часть рассеянного излучения, попадающая в интервал длин волн (λ, λ+Δλ).
Общую мощность сигнала, воспринимаемую детектором в момент t(=2R/c), соответствующий времени, необходимому для того, чтобы лазерный импульс прошел со скоростью света с путь R и обратное излучение достигло лидара, можно определить как
 (5)
(5)
Интегрирование необходимо в связи с тем, что излучение, достигающее детектора в момент t, исходит не только с расстояния ct/2, но и из любой точки вдоль траектории лазерного импульса, где возникает рассеяние. Пределы интегрирования по длине волны совпадают со спектральным интервалом Δλ0 , центром которого является λ, фотоприемного устройства лидара. С учетом уравнений (2) и (3), можно записать следующее выражение:
 (6)
(6)
Для рассеивающей среды ширина спектрального интервала наблюдаемого излучения такая же узкая, как и лазерного излучения. Если предположить, что ширина спектральных интервалов этих обоих излучений много меньше ширины спектрального интервала Δλ0 фотоприемного устройства, то Li(λ) и β можно рассматривать как дельта-функцию. Если также предположить, что в области перекрывания поля зрения фотоприемника и площади, освещаемой лазерным лучом, исследуемая среда будет однородной, то можно записать следующее уравнение:
 (7)
(7)
Выше указывалось, что здесь вероятность ξ(R,r) следует считать равной единице в области, где поле зрения фотоприемного устройства совпадает с площадью, освещаемой лазерным лучом, и равной нулю для любой другой области. Будем полагать также, что поперечное распределение мощности в лазерном импульсе на расстоянии R на площади AL(R) является однородным. В этом случае
 (8)
(8)
и
 (9)
(9)
Дополнительным упрощением является замена формы лазерного импульса, у которого интенсивность меняется от времени, на прямоугольную форму с продолжительностью τL. Тогда пределы интегрирования в уравнении (9) составят от c(t — τL )/2 до ct/2. Далее, так как интересующий нас путь луча в среде обычно значительно превышает длительность (длину) лазерного импульса cτL (иначе разрешение будет плохим), то для небольших промежутков расстояния, в которых ведется интегрирование, параметры, зависящие от расстояния, можно считать постоянными. Тогда полностью рассеянную мощность лазера, регистрируемую фотоприемником за время t = 2R/c, можно выразить как
 (10)
(10)
Для
прямоугольного лазерного импульса
продолжительностью
 справедливо
соотношение
справедливо
соотношение
 (11)
(11)
где EL — выходная энергия лазерного импульса, a T(λL, R)— коэффициент пропускания атмосферы на длине волны лазера для пути R. Из закона Беера — Ламберта следует, что коэффициенты пропускания равны
 и
и
Здесь k(λL,R) и k(λ,R) являются коэффициентами ослабления в атмосфере для лазерной и детектируемой длин волн соответственно. Очевидно, что комбинация коэффициентов пропускания дает выражение для общего коэффициента пропускания атмосферы:
 (12)
(12)
Хотя мгновенная мощность, падающая на детектор, является ценной характеристикой, еще большее значение имеет приращение радиационной энергии на длине волны λ, регистрируемое детектором в интервале времени (t,t+τd), где τd — период интегрирования детектора, а t= 2R/c:
 (13)
(13)
Объединение уравнений (10) — (13) позволяет получить выражение для рассеиваемой энергии лазера, регистрируемой за время отклика детектора тd:
 (14)
(14)
Его часто называют основным лидарным уравнением для рассеяния.