

Глава V силы инерции звеньев машин
Как выяснилось из содержания примера IV главы, для облегчения учета общего динамического эффекта, производимого отдельными звеньяии машины, бесчисленное множество сил инерции, связанных с различными материальными точками каждого из звеньев, удобно объединять в равнодействующие или эквивалентные, системы сил и пар, сводящиеся в каждом звене к одной или нескольким силам или силам и паре. В настоящее главе разберем вопрос о методах нахождения этих эквивалент* ных систем сил инерции для звеньев машины, совершающих вращательное, поступательное и сложно-плоское движение.
1. Силы инерции звеньев, совершающих вращательное
движение
Случай неуравновешенных звеньев. К звеньям этого рода относятся те части машин, которые совершают вращательное движение, но которые имеют общий центр тяжести, не лежащий на оси вращения. Сюда относятся различного рода кривошипы, поводки, кулисы, неравно плечные коромысла и т. д. Пусть фиг. 30 изображает в общем виде такое звено «S. Точка с — его центр тяжести, е — эксцентриситет или смещение положения центра тяжести относительно оси вращения, • — угловая скорость в а— угловое ускорение звена.
жению кривошипа, когда "7^ = 0 и W= Vbmw т. е. когда кривошип примерно перпендикулярен к шатуну
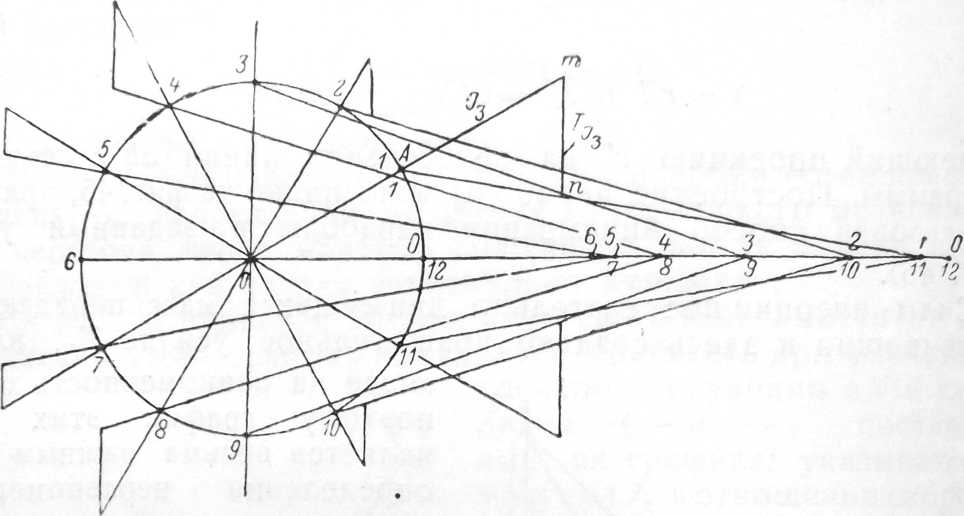
Задача. Произвести численный ^подсчет сил инерции У8 в 12 положениях кривошипного механизма при следующих дан
ных.
Фиг. 47.
Вес поступательно движущихся частей G3=290 кг, число оборотов кривошипа п=120 об/мин , радиус кривошипа г=300л*.и, отношение r/l = X = 1/4.
0 |
1 1 |
f Ixl J |
\. / + * \У\6 7 8 9/10 |
11 \12 |
||
\ |
|
7 Ш |
|
/У |
|
|
Фиг. 48.
Построить график приведенных к пальцу кривошипа касательных сил от сил инерции У8 при тех же условиях.
^^Сиды инерции звеньев, совершающих сложно-плоское
движение
К этому виду звеньев относятся в машинах различного рода шатуны, перекатывающиеся рычаги, эпициклические колеса, ходовые колеса и т. п.
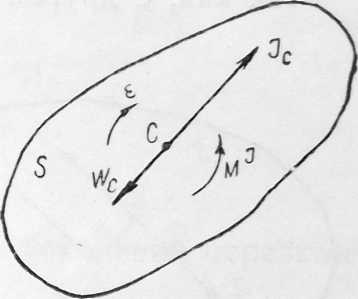
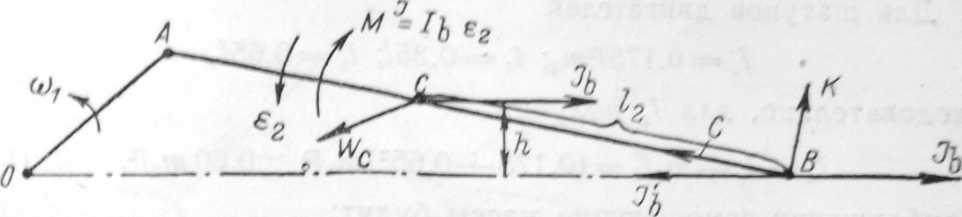
Приведение сил инерции к силе и паре. Положим на фиг.
будет изображено звено, совершающее общий случай плоского движения. Как известно из кинематики, всякое сложно-плоское движение можно рассматривать как составное из двух простейших—поступательного и вращательного. Такое же разложение явится удобным и для нашей задачи— сложения сил инерции, развивающихся при этом движении. В отличие от кинематики, где поступательная часть движения рассматривается безразлично, с какой точкой звена (практически с той точкой, скорость которой известна), в задачах динамики удобно рассматривать поступательное движение вместе с центром тяжести. Итак, представим движение шатуна разложенным на движение поступательное вместе с центром тяжести и движение вращательное вокруг центра тяжести. Поэтому и силы инерции, возникающие в сложно-плоском движении, могут быть разбиты на силы инерции в поступательной части движения и силы инерции во вращательной части. В движении поступательном вместе с центром тяжести С силы инерции сведутся (на основании § 2) к силе инерции, равной массе шатуна, умноженной на ускорение его центра тяжести:
Ic==mWe (104) фиг49-
и направленной против ускорения Wc. Во вращательной же части движения силы сведутся (на основании § 1) лишь к одной паре сил с моментом:
ЛР=/,е, (105)
направленным против углового ускорения звена. Что касается центробежной и касательной сил инерции, то они будут равны нулю (так как эти силы зависят от величины эксцентриситета в положении центра тяжести относительно оси вращения, а в данном случае при принятом способе разложения движения во вращательной части движения ось вращения как раз проходит через центр тяжести).
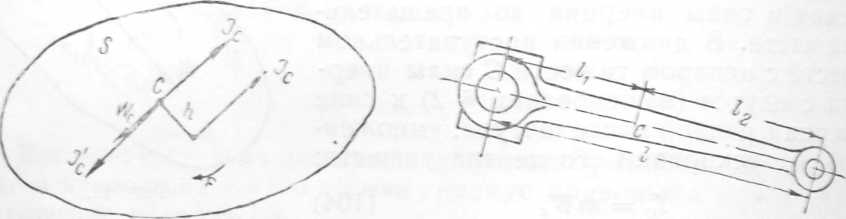
Приведение сил инерции в одной силе. Выбирая плечо пары MJ таким, чтобы составляющие пары как раз получились бы равными )с, получим величину этого плеча h из
А = у-. (106)
с
Располагая эту пару таким образом, чтобы одна из ее составляющих/^ пошла бы против 1С, получим расположение этой пары, показанное на фиг. 50. Видим, что силы 1С и Гс как две равные и противоположные могут быть отброшевы. В итоге от всех сил инерции шатуна получается всего одна сила инерции 1с — сила инерции поступательного движения шатуна вместе с центром тяжести, но приложенная не в центре тяжести, а на
расстоянии от него на плечо вычисленное по ф-ле (106) i отложенное по перпендикуляру к ускорению wg в такую сторону, чтобы момент jc относительно центра тяжести с вышел бы против углового ускорения.
Справочные данные относительно шатунов двигателей. Для шатунов поршневых двигателей обычной конструкции, как показывают обмеры, с достаточной точностью можно считать положение центра тяжести С в расстоянии /2 =0,35/ от кривошипной головки и 4=0,65/ — от крейцкопфной.
Для момента же инерции опыты, производимые по методу качания, дают следующую эмпирическую формулу:
1с = 0,175 ml2. (107)
Так как, с другой стороны,
/с ш рьп,
Фиг. 59. фиг 5|
где рс — радиус инерции шатуна относительно центра тяжести, то
рс = 1/0,175/ = 0,419/. (108)
Для призматического шатуна постоянного сечения имели бы | = /2 = 0,5/; |
/, = и 9с = 0,29/. ( (109)
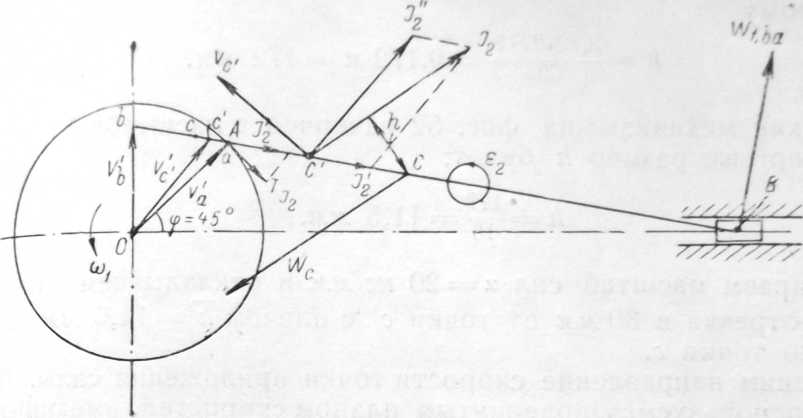
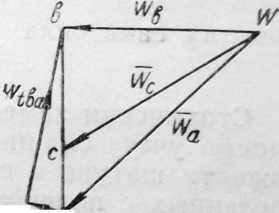
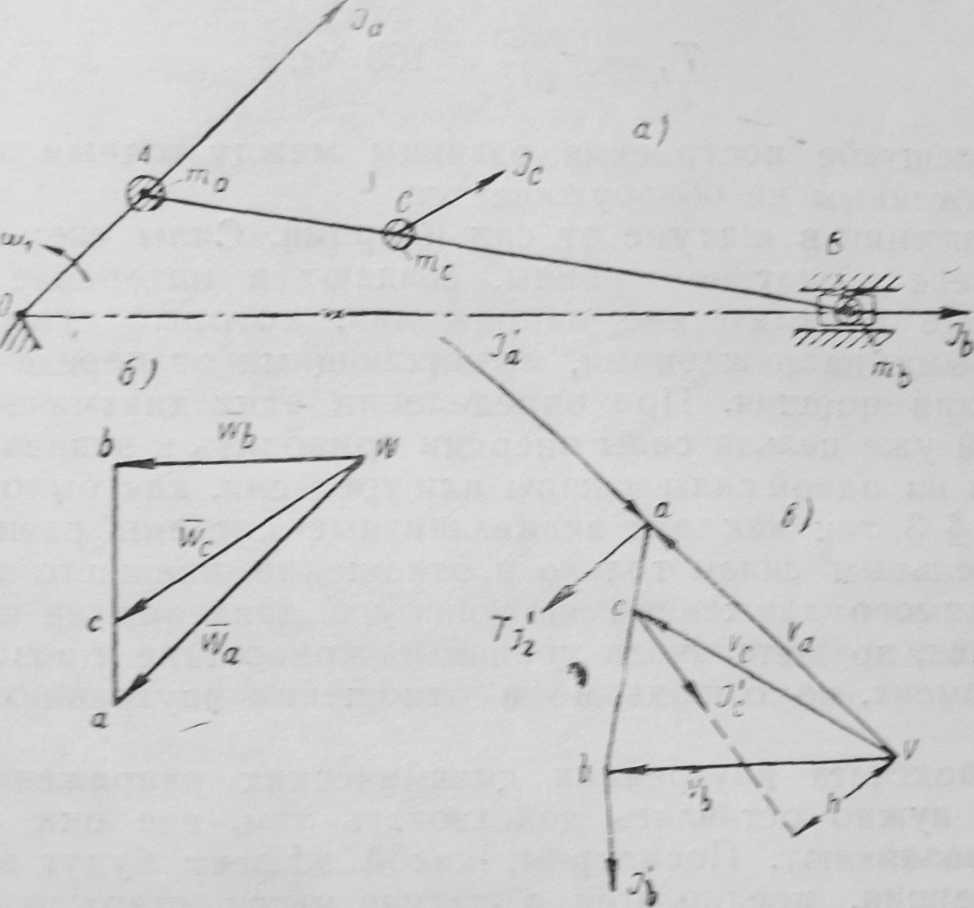
Пример. Для кривошипного механизма двигателя (фиг.52) подсчитать силу инерции шатуна Л и определить ее плечо к при следующих условиях: вес шатуна С72 = 145 кг9 число оборотов кривошипа п= 120 об мин., его радиус г = 300 жл,
). = г\1 = Найти касательное усилие, передающееся от
силы Л на кривошип. Угол поворота кривошипа © = 45°. Ускорение Wa будет:
w. = гш?= 0,3(^щ^) «47,5 м'сек\
Ускорение точки b — wt найдется по ф-ле (100): wk = wa (cos ? + /7/cos 2f) = 33,6 м/сек*.
При помощи ускорений wa и wb строим план ускорений
эЗ) и, подразделяя отрезок ab т wba в отношения ac:cb аС^В* находим ускорение wc в виде вектора wc длиной34*
фиг. о2.
Так как вектор Wa был отложен на плане ускорений отрезкам длиной 40 мм, то
Wc = Wa Ш = 47,5 - 4 40,5 м\сек\
wa 40 '
Сила инерции шатуна /2, обозначенная в ф-ле (104) через J с, будет
Go ш± 145
У,—ЩГ.-Й^.^. .40,5
600 агг
с направлением против ускорения Wc. Определим плечо ее действия относительно центра тяжести шатуна. По ф-ле (106)
по ф-ле (107) находим
1с = 0,175 т2Р = 0,175 ^ 1,2* = = 3,72 кг-м-сек2.
Раскладывая ускорение wba = ш> на нормальное WW и ка
нательное ^«,а, получим
wtba = 28 л£л£.
Истинное поэтому будет
|Щ| "7а Щ± =^_5 28 = 33 2
6 и. и. колчнн 3486
%8а <*>
Фиг. 53.
Вмаста с тем угловое ускорений шиунп найдет
, *27 7 i/W
Поэтому
A-8'7w,l-°'172^- хп»*' '
ТвК KIK ivirxлип.nvi nil фИГ| 52 н.'1»|Г|>'п-п В МЯСШТВбе !/, и ТО НА чертеже р&ЗМВр A (iy/in
• I 172 м .
Дек Шг I I ,Г) 4-м,
ww
Выбираем масштаб сил н и» 20 нв/мм и откладываем силу /-в виде отроке в ЪО мм от точки с1 с плечом // 11 \> ммотщо*
СИТСЛЬНО ТОЧКИ
Выясним направление скорости точки приложения силы* Для этого воспользуемся повернутым планом скоростей*» имеющимся на схеме механизма в виде треугольника ЬОА (сравнить стр* Щ, Делим отрезок ли в отношении АС : СИ, получим точку с' и вектор Ос' ve> — повернутой скорости VV* Сама скорость Vj будет действовать в с' по направлен и ю, перпендикулярному к VO.
Раскладываем силу У§ на две составляющих: Л, перпендикулярную к скорости точки и на силу Уз, направленную пошя~ чу ну. Составляющая Уз» как перпендикулярная к скорости ее точки приложения, не создает никакого вращательного действия и л, л сила передастся в точку А и здесь создаст искомое
вращательное усилие Tj9, в виде своей проекции на направление скорости в точке А.
Масштабное значение этой силы получается равным:
Tja *** 8 мм,
поэтому сама сила
Tj%— xt/, — 160 кг.
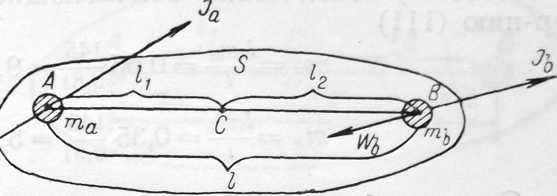
Статически замещающие массы. Только что рассмотренный способ учета сил инерции требует определения ускорения центра тяжести шатуна и его углового ускорении* Однако в вопросах, связанных с подсчетом лишь самой силы инерции в переносном движении шатуна, т. е. без определении ее плеча А (или момента MJ), можно обойтись не только без вычисления углового ускорения, но и без определения Wcl).
Пусть для шатуна произвольной формы, изображенного на фвг. 54, будут известны ускорения двух его точек А и В, лежащих на прямой, проходящей через центр тяжести с, и находящихся на расстоянии /, и /, от него*
О Подсчитывать силы инерции частей машины с точностью до силы, не учи*
■аая парм, nt иходитгя при определении линейной вибрации (подергивания) идам ем та стационарных машин под влиянием неуравновешенных сил инер-
Представим в точках /1 и в помещенными некоторые точечные массы та и ть, взятые из расчета
та +ть = т. \
Первое уравнение указывает, что массы та и ть имеют общий центр тяжести с шатуном, а второе, что обе массы та и ть в сумме равны массе шатуна. Решая равенства (110), получим
та =-у- и ть =-7- • (111)
Такие две массы /тга и /поносят название статических замещающих масс шатуна, так как согласно (111) общая масса шатуна распределена по точкам л и в обратно пропорционально расстояниям этих точек до центра тяжести С, т. е. так, как распре- \ деляется вес, если в -ащ точках а и в представить шатун опертым на опоры.
Сравним силы инерции этой группы точек с силами инерции шатуна.
Сила инерции в поступательном движении будет на основании ф-лы (96)
(ma+mb)Wc = mWc = Jcy
т. е. как раз равна действительной силе инерции шатуна.
Что касается пары сил инерции, то массы та и ть дают пару сил инерции:
мг = 1сг = (та & + ть Щ е, в то время как действительный момент силы^ инерции будет
При Vlxl2 больше рс — радиуса инерции шатуна относительно центра тяжести,— момент мг получается больше, чем действительный mj, и избыточный момент будет равен
mj" (та l\ + mhl\ — jc) е, (а)
или, принимая во внимание (111), получим вместо (а)
mj" =^{т1^ — 1с)г. (112)
Этот момент уже будет направлен не против е, а будет совпадать с ним по направлению (см. схему на фиг. 55).
* 83
Фиг. 54.
Итак, в тех случаях, когда добавочной парой мг можно пренебречь, вполне допустимо силы инерции шатуна подсчитывать, пользуясь статическим замещением его массы двумя точечными
массами, расположенными в шарнирах.
Пример. Для кривошипного механизма предыдущего примера, вновь изображенного на фиг. 56, а, имеем:
02 = 145 кг,
"7а=47,5 м/сек9,
wb — 33,6 м/сек2,
4=азб /,
/2 = 0,65Л

Фиг.
Поэтому статические замещающие массы шатуна будут по ур-нию (111)
/о/Ло Л 145 г, г тв=-^ = 0,65ш=9,6
кг сек*
ть ='-!р= 0,35 щ = 5,175
м
кг сек2
м
Силы инерции, развиваемые этими массами, получим равными ja = mawa = 9,6-47,5 = 455 кг;
Л =/я^ = 5,175.33,6= 174 кг.
Легко убедиться из геометрического сложения этих сил, выполненного на фиг. 56, б в масштабе х = 20 кг/мм, что в резуль-

Фиг. 56.
тате получим силу /2, равную прежней силе /2 (см. построение на фиг. 52), но уже не приложенную в точке с\ а в точке с0, находящейся несколько ближе к а, чем с'.
Динамически замещающие массы шатуна. В вопросах, требующих точного учета сил инерции шатуна1), не прибегая к определению углового ускорения шатуна, большое упрощение вно-
J) Сюда относятся, например, вопросы, связанные с определением равномер-
олгтя ТАМ КГШйОШИПНЫ К МИШИН.
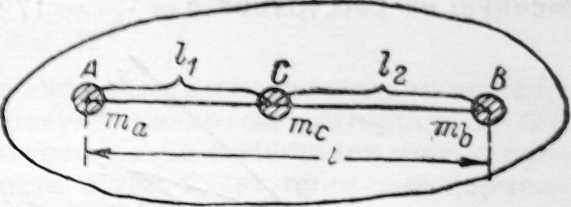
шатуна трен* точечными массами me> ть и те (фиг. 57), лежащими на одной прямой, проходящей через центр тяжести (массой mit в расстоянии 1х от центра тяжести, массой ть в расстоянии /, и массой mt в самом центре тяжести) в динамическом отношении вполне ему эквивалентными, т. е. при движении развивающими те же суммарные силы инерции, что и действительный шатун. Выясним, как определить эти массы. По § 3 знаем, что силы инерции шатуна сводятся к силе инерции в поступательном движении вместе с центром тяжести j € mm mw, и к паре сил инерции во вращательном движении вокруг центра тяжести mj = it е.
Для того чтобы силы инерции масс ша » ntp и тс могли бы за* менять силы инерции шатуна в поступательном движении вместе с центром тяжести С, сумма массюв, т* и те должна равняться массе самого шатуна и иметь с ним общий центр тяжести.
Это условие выражается следующей системой уравнений:
«« + ть + mcz=z т'\
ть А,- I
1х
(ИЗ)
Фиг. 57.
Условие же равенства пары сил инерции как действительного шатуна, так и определяемых замещающих масс, сведется к равенству их моментов инерции относительно центра тяжести, что запишется так:
та l\ -\-ть1\= 1с
ОН)
Решая ур-ния (113) и (114), получим искомые динамические, замещающие массы в виде:
та , ть = ^ * тс = т — ^~ • (115)
Для шатунов двигателей на основании предыдущего (см. § 3) имеем
/с -0,175т/2; ^=0,35/; /8=0,65/.
Подставляя эти значения в ур-ние (115), получим
та = 0,50 т; ть =0,27 т\ тс =0,23 т. (116)
Пример. Для шатуна кривошипного механизма предыдущего примера имеем G3=145 кг, поэтому по ур-нию (116) получим:
та = 0,50т2=
0,50-145 9,81
7,4
кг» сек*
м
кг >см2
тс =0,23т-=
9,81
0.23*145 9,81
3,4 кг*сек* м
Принимая во внимание, что по примеру § 3 Wram47fi м № Wb 33,6 jw/rr/r'' и w, =«40,5 м1свк%> получим силы инерции 4 Уа и Л > развиваемые этими массами ///„, ть, Мс следующими:
Л- |
» /Яд |
1Га |
7,4 -47,6 |
- 350 кг; |
Л" |
|
|
=4-33,6 = |
135 лгг; |
Л ■ |
а 0,1 |
IT, |
■3,4-40,6 = |
-138 кг. |
Эти силы в масштабе * »10 кг/мм отложены от точек А, В и С шатуна (фиг. 68) против соответствующих ускорений Wa, Wb
и Wc.
Складывая эти силы по способу последовательного сложения, легко убедиться, что получим равнодействующую силу инерции J%=*m%Ц^вбОО кг (в масштабе чертежа, равного ЬОмм) и приложенную на расстоянии // ■» -у = 172 мм (в масштабе чертежа
Фиг. 58.
11,5 мм) от центра тяжести шатуна — результат, полученный раньше (пример к фиг. 52).
Приближенные динамически замещающие массы. Специально для шатунов двигателей в вопросах, связанных с оценкой влияния сил инерции на равномерность вращения главного вала, возможно в подсчете сил инерции сделать еще упрощение против рассмотренного в предыдущем пункте.
Вместо того, чтобы по § 3 раскладывать движение шатуна для подсчета сил инерции на движение поступательное вместе с центром тяжести и движение вращательное вокруг центра тяжести, разложим движение шатуна на поступательное вместе с цапфой крейцкопфа В и вращательное вокруг В. В первом движении силы инерции по § 2 сложатся в силу инерции .Д, равную массе всего звена, умножеияой иа ускорение Wt> и приложенную в центре тяжести С, а силы инерции во вращательном движении вокруг В ведутся на основании § 1 к центробежной силе С и касательной силе К, равным
С ■«* К mm mt/,tfl
и соответственно направленным от В к А и перпендикулярным к АВ (фиг. 59).
Касательным усилием от силы с п точке А можно пренебречь, так как угловая скорость от которой замет с •ообща нерачительна (ее максимум рааеи г\1 а кроме того н момент, когда ша приобретает свои наибольшие аяачении (около
мертвых положений) ввиду малости отношения в втих птФ
жениях не будет создаваться значительного вращательного усилия на кривошипе. В
Фиг. 59.
Аналогичное заключение можно сделать и относительно силы К. Сила К перпендикулярна к шатуну, наклоном которого к ОВ при нормальной длине его относительно кривошипа можно пренебречь, поэтому сила К вместе с тем будет примерно перпендикулярна к скорости Vbt следовательно, почти целиком воспри-мется реакцией параллелей.
Приведя силу Jb к точке 5, получим пару сил Jbh и силу Jbt приложенную в В. Легко видеть, что влиянием пары JJk на вращательное усилие в кривошипе можно пренебречь, так. как, когда значительна Jb = т2 Wbt т. е. в мертвых и около мертвых положений, плечо h обращается в 0 или мало, и наоборот, когда h велико при ф = 90° и около 90°, мало становится Wb и, следовательно, и Jb.
А

Фиг. 60.
Окончательно получим, что вращательное усилие в А главным образом будет создаваться силой Jb, приложенной в В и парой сил от сил инерции во вращательной части движения шатуна вокруг В:
Эта группа сил изображена на фиг. 60.
Заменим шатун двумя массами, рассчитанными из условий
г. е. mal* = lb, | (117)
ma = jf; mb = m2 — ff:. (Ц8>
Так как сумма этих масс равна mv а момент инерции относительно точки В равен /», то в поступательном движении вместе с В они создадут силу инерции как раз равную Jb« щШ^, а во вращательном вокруг В—пару сил инерции Лг - ~ (если пренебречь их центробежной силой С —»mj<*>l и касательной /fewjtj, вращательные усилия от которых на кривошипе по выше разъясненному малы), т. е. группу сил» указанную на фиг. 60.
Для шатунов двигателей
/9штОЛ75Рт^ 4 = 0,35/; /,«0,65/, следовательно, для 1Ь получим
1ь = /с+таЙ = (0.175+0>659) m,/2 3 0,60 щР. (119) Приближенно заметающие массы будут:
тв = -~- = 0>60/и3; /я, = /п3—> =0,40 та. (120) В шатунах с равномерно распределенной массой по длине: /х = /а = 0,5 /; Л = -|2'та/2; 4 e -jj ^а*1 + ^2 (тО* "* "Г
та = 7з тэ> = */» тг (121)
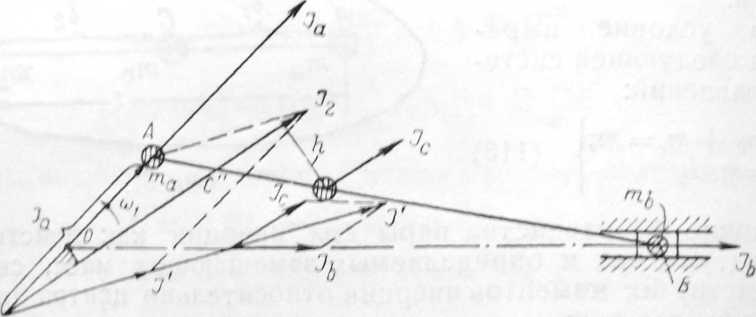
Пример. Найти касательные усилия от сил инерции шатуна кривошипного механизма, воспользовавшись данными примеров, рассмотренных в § 3. Кривошип вращается равномерно с угле вой скоростью я =120 об/мин. Угол? = 45°.
На основании стр. 80 имеем для ускорения точек л, В и С
1^ = 47,5 л/сек1; Wb 33,6 м/сек* и №, — 40,5 м/сех**
Точвые замешающие массы согласно стр. 85 будут:
т , к1*сфк* А кг*сек* о А кг•сек* т. = 7,4 -, т* = 4--, т> » 3,4---•
Силы инерции ./„. Jb и У(, развиваемые этими массами,
7Я = 350 кг; Л= 135 кг; Уе— 138 кг.
Выбрав масштаб сил * = w *v перенесем силы на схему механизма (фиг. 61, а), а потом, повернув на 90° на план скоростей (фиг. 61, б).
Искомое касательное усилие 7 \ найдем по теореме Жуковского (гл. Ш. § 4) из условия, что момент повернутой силы /Ч на плане скоростей должен равняться сумме моментов относительно полюса плана скоростей повернутых сил /у, J» ft$ причем все силы предполагаются снесенными в соответствующие точки плана скоростей: TJ% fa в точку a, J\—в точку b% ftm в точку с. Так как сила J'a проходит через центр вращений кривошипа, то она никакого врашательного усилия производить яе будет. На плане скоростей это выражается тем, что сила Тф
проходит через полюс V
Вращательные усилия будут создавать лишь силы lb и J,. Обозначив плечо силы /с через h и замечая, что плечами сил
fj и ^ будут векторы Va и Vb, получим
0»>
Ф*!Г. 61.
Измерение на плане скоростей, построенном при Va = 40 мм.
-Ас С i
V* = 33
Из ур-ния (а) получим
135-33-г 138-15
40
= 163 кг
направление ее будет против скорости.
При введении же в рассмотрение приближенных дивам? чески замешаюших масс получим
тл = -р=—р—==0.Ь0/л,= о,8о ———,
т
> = те~~*~= 0,405,9
*) Расхождение и 2»« против результата, подученного раньше (на стр. 82), объясняется малостью масштабов построения.
Силы инерции этих замещающих масс будут Ja = maWa = 8.85-47,5 — 420 кг;
jb ^mbwb=: 5,9.33,6 = 198 кг. Сила ib, которую получим из выражения
откуда
т 198-33 %м „
т. е. в масштабе построения разницы между точным расчетом и приближенным не обнаруживается. '
Напряжения в шатуне от сил инерции* Силы инерции, развивающиеся в шатуне машины, создают в материале шатуна добавочные динамические напряжения, которые суммируются с основными напряжениями, возникающими от передачи шатуном усилий поршня. При определении этих динамических напряжений уже нельзя силы инерции приводить к эквивалентным системам из одной силы и пары или трех сил, как было рассмотрено в § 3, так как эти эквивалентные системы равнозначны действительным силам только в отношении внешнего эффекта, производимого движением шатуна: его давления на концевые сочленения, вращательного усилия на кривошипе и воздействия на фундамент, но отнюдь не в отношении внутренних напряжений.
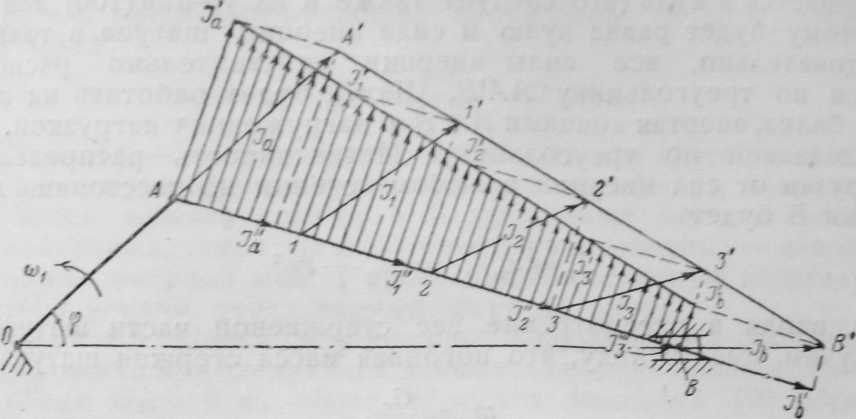
Для подсчета внутренних динамических напряжений силы инерции нужно оставлять действовать там, где они действительно возникают. Посмотрим, какой эффект будут вызывать силы инерции, предполагая в шатуне массу стержня шатуна, между головками распределенной равномерно по его длине. В этом случае силы инерции будут давать картину распределения, обратную распределению линейных ускорений точек центральной линии шатуна.
При равномерном вращении кривошипа это распределение указано на фиг. 62. Сила инерции в точке а — Л будет направлена по кривошипу от центра вращения и будет равна, если
обозначим через mq погонную массу шатуна, т. е- -у-,
ja = mqr<»2,
а в точке в будет горизонтальна, направлена против ускорения и будет равна:
Л «■ тдгшг (cos 9 -f-7/ cos 2-f).
Концы векторов промежуточных сил инерции Jv У2, У8,... расположатся на прямой Л'В'. Направление этих промежуточных сил инерции определяется делением шатуна ав и линии "а& на пропорциональные части и соединением между собой точек пропорциональных делений. Например, направление вектора Л получается соединением точки 2, взятой посредине шатуна, с точкой 7 в середине прямой А*& и т. д.
Как видно, силы инерции Ja, У1? изгибают шатун не-
полной своей величиной, а только составляющими /, /, 71,...
Фиг. 62,
перпендикулярными к шатуну, в то время как другие составляю-щне -С- А^2* — - будут действовать вдоль шатуна и вызывать его продольное сжатие (вернее, продольный изгиб). Наибольший
А
Фиг. 63.
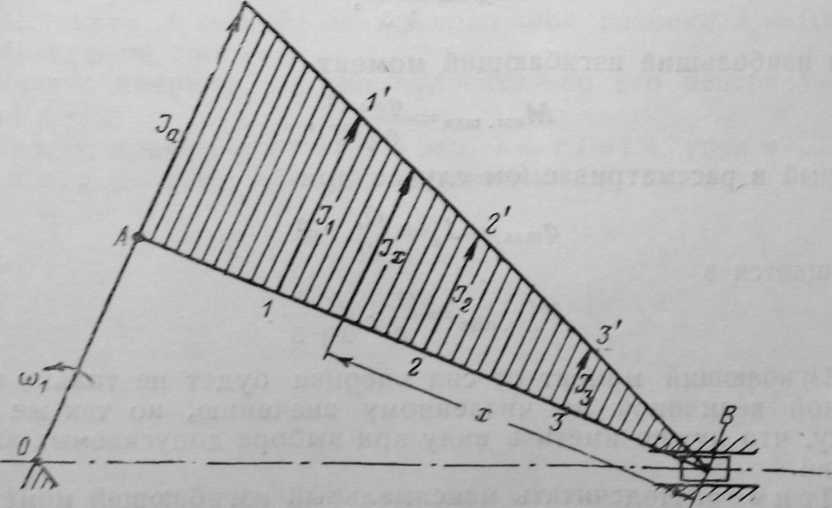
поперечный изгиб получится в положении, когда все силы инерции /Л, /19 У2,- расположатся перпендикулярно к линии центров шатуна. Это положение указано на фиг. 63.
Оно будет для кривошипного механизма при том значения угла у, при котором кривошип OA делается перпенднкудярнми
к шатуну АВ.
Как известно из кинематики механизмов, в указанном поло*
жешш кривошипного механизма скорость поршня достигает наибольшей своей величины и, следовательно, ускорений што обращается в нуль (это следует также и из ур-ния (100) для УД Поэтому будет равна нулю и сила инерции шатуна в точке в, следовательно, все силы инерции действительно распределятся по треугольнику Л А'В. Шатун будет работать на язгяб как балка,опертая концами А и В и нагруженная нагрузкой, распределенной по треугольнику. Интенсивность распределения нагрузки от сил инерции в любом сечении на расстоянии х от точки В будет
J я88=8 Ja -у- = Щ х гт% (122)
или, вводя в рассмотрение вес стержневой части шатуна ос, получим, имея в виду, что погонная масса стержня шатуна
Об
я gl
J*~jfrr<»*x. (122а)
Как известно из сопротивления материалов, наибольший изгибающий момент в балке, нагруженной сплошной нагрузкой, распределенной по закону треугольника, будет в расстоянии от опоры
а сам наибольший изгибающий момент
"'изг. max —-~ ^ 1/"з" '
который в рассматриваемом случае при
W = -/a = §-^2
обращается в
^зг.тах = | -^7- (125)
Изгибающий момент от сил инерции будет не только переменной величиной по численному значению, но так же и но знаку, что нужно иметь в виду при выборе допускаемых напряжений.
Пример. Подсчитать максимальный изгибающий момент от сил инерции в шатуне рассмотренного выше кривошипного механизма.
Имеем для веса тела шатуна между головками GC^~G2 = 36 кг; г = 0,3 м; !=\,2м; ш, = 12,55-^.
(124)
По ф-лс (126) получим
тть mm 5JT ' <fy л ' 16 * KtMt
Положим, что шатун имеет круглое сечение с дяамегоом а месте воэиикиовеиия наибольшего нагибающего ыоншнуш dт60 мм, когда возникающее напряжение от f/еитробежиоА
силы будет
где 0, W — момент сопротивления нагибу круглого сечения/ В рассматриваемом случае тихоходной машины напряжение получилось незначительное; в быстроходных же двигателях автомобильных, танковых и особенно в авиационных—ияпряже-вие от сил инерции мож&т превосходить основную нагрузку от полезных усилий, передаваемых шатуном
Задачи: 1) Найти силу инерции, разрывающую обод чугун* кого маховика при следующих данных'диаметр маховика /> — 4 м, вес обода О^^б т, число оборотов мвхошикй 100 об/мин, f удельный вес чугуна у «7,25 kijom*,
2) Определить добавочный момент, который будет переда ваться на вал маховика от сил инерции, если при посадке махо* вика на вал было допущеио отклонение геометрической оси маховика от оси вала в 2 мии# Размеры маховика в&ять из пре* дыдушего примера.
3) Определить суммарную силу инерции шатуна автомобиль-него мотора при следующих данных, вес шатуна 1230 ?, длина шатуна /«"230 мм\ центр тяжести шатуна расположен в расстоянии /, 0,35/ от кривошипное головки 4 0,651 от крейцколфной головки.
Радиус инерции шатуна относительно его центра тяжести
решш[/(),\7 t.
Радиус кривошипа г mm Ь7& мм; \mmrjl—\^, угол V^(f, 30' f
и т. д. до 360''; <», 1000 об/мин,
РАЛДЕЛ ГРЕТИЙ
Силовой рйсчфщ механизм о §
ГЛЛНА VI
Определение усилий и звеньях машин и давлений в кинематических парах
Определение усилий в звеньях мехвнизмв и давлений • кинематических пирах представляет много общего с определи* нием усилий и реакций в различного рода фермах, как зто делается в графической статике и строительной механике* Уело» вимся в некоторых общих положениях* Бели стержневое звено механизма будет растянуто, то внешние растягивающие силы о будут расположены так, как указано на фиг. 64, а внутренние
Фиг, Ы,
усилия U, сопротивляющиеся втим силам, будут им противо-положим (направлены, как говорят, от узлов или шарнирных точек) и им равны* Следовательно,
В случае стержня или эвена, сжатого системой сил (фиг* 66)» внутренние усилия /' будут опять равны л\ но направлены к узлам. Усилия U ш растягиваемом стержне часто указываются со знаком плюс, а усилие /; в сжатых — знаком минус.
Звенья механизма чисто нагружаются силами, приложенными между шарнирными или узловыми точками (таковы, например» силы тяжести, силы инерции) Такой случай изображен на фиг. 66. Здесь уравновешивающие силы или реакции /?«и AV в точках А и В будут составлять с направлением звена некоторый угол и пересекаться, в случае равновесии, с Я в одно* точке или же, смотря по условиям задачи, будут параллель* ними Р. и атом случае, раскладывая реакции вдоль звена и поперек звена, получим, что сила л\, Л\! будет сжимать стержень на участке АС и ей будет противостоять внутреннее усилие £4*
![]()
ФИГ, ЬЛ
а Л я0, будет растягивать стержень
будет противостоять
внутреннее усилие
на участке ut. Силы
св и ей же р, ra
ОппРяТлГ»?ыГДящиеся в Равновесии, будут изгибать стержень.
«тЗДиГпо! Усилий в звеньях механизма и реакций в кинематических nanav *>__*~________________ *
ПаРах разберем групп, входящих в
сначала на примере простейших состав сложных механизмов, а именно на
двухповодковой „ трехповодковой группах.
с -е" JL~ua р"
фи г.
1. Метод непосредственного разложения и метод плана сил для отдельных кинематических групп
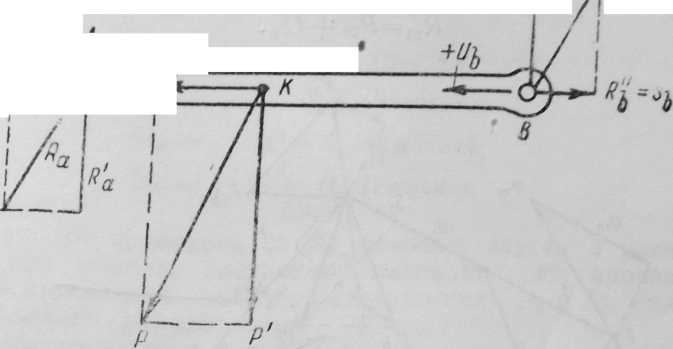
На фиг. 67 изображена двухповодковая группа, которая в точках Л и С присоединена к подвижным или неподвижным звеньям 3 и 4. Звенья i и 2 группы в точках кх и к2 загружены силами рг и р2 гк Требуется найти реакции в шарнирах а и в и усилия в стержнях 1 и 2.
Эта задача статически определенная. Сначала решим задачу, пользуясь разложением сил на самой диаде, а потом решим туже задачу, иным приемом, носящим название плана сил, представляющим аналог так называемой диаграммы Кремона для ферм. Для решения задачи первым путем прибегаем к следующему оперативному приему, приближающему наше решение к случаю ферм: разносим нагрузки рх и р2 по шарнирам, пользуясь методом параллельных сил, т. е. обратно пропорционально расстояниям опор до точек приложения усилий. Получаем в шарнирах а, в и с соответственно усилия р\а, р\ь, ргъ и р2с. силы р\ь и р2ь складываем по закону параллелограма в одну силу рь, таким образом
рь щ pib + %.
Силу рь раскладываем .по стержням диады на силы Si и
s19 т. е.
рь = si -f - *S"2.
i) Если система движется, то такими силами могут быть силы инерции.
*>5
Силы Ux = —SA я Ut= -$г будут усилиями в стержнях У и 2, причем то и другое будут сжимающими усилиями.
Силу Р:,> складываем с усилием Ult получаем давление первого стержня на второе в виде реакции Rxt
Точно так же, складывая р2ь с усилием uz, получим воздействие второго звена на первое в виде реакции.
Фиг. 67.
Конечно, на основании принципа .действие равно противодействию* мы должны получить
Наконец» складывая усилие Ux в точке А с силой Pia, получим Rn и реакцию
rj] — — r\ з. Точно так же получим в точке с
т
/<4i» ни*
К сожалению, найденные усилия Ux и U% не будут представлять истинных усилий в стержнях, ввиду произведенного нам! яроизводьво разноса сил р% н Р9 по шарнирным точкам, пользе эуясь законом параллельных сил. На самом деле их нужно было
не разносить, а искать дли них уравновешивающие силы по напри* влеяню найденных реакций. Но так как направление этих реакций аебыло известно заранее, то и пришлось прибегнуть к изложенному приему. Во всяком случае найденные реакции не зависят
от метода замены системы нагружающих сил на статически им эквивалентные, и реакции, найденные вышеизложенным приемом, будут истинными реакциями в шарнирных точках.
Проектируя полученные реакции на направление стержней.
найдем истинные усилия в стержнях:
U\* — —S)e = (растяжение); U\m = — S« (сжатие);
£Д* = — 5& = Я£ (сжатие); If* а — = (сжатие).
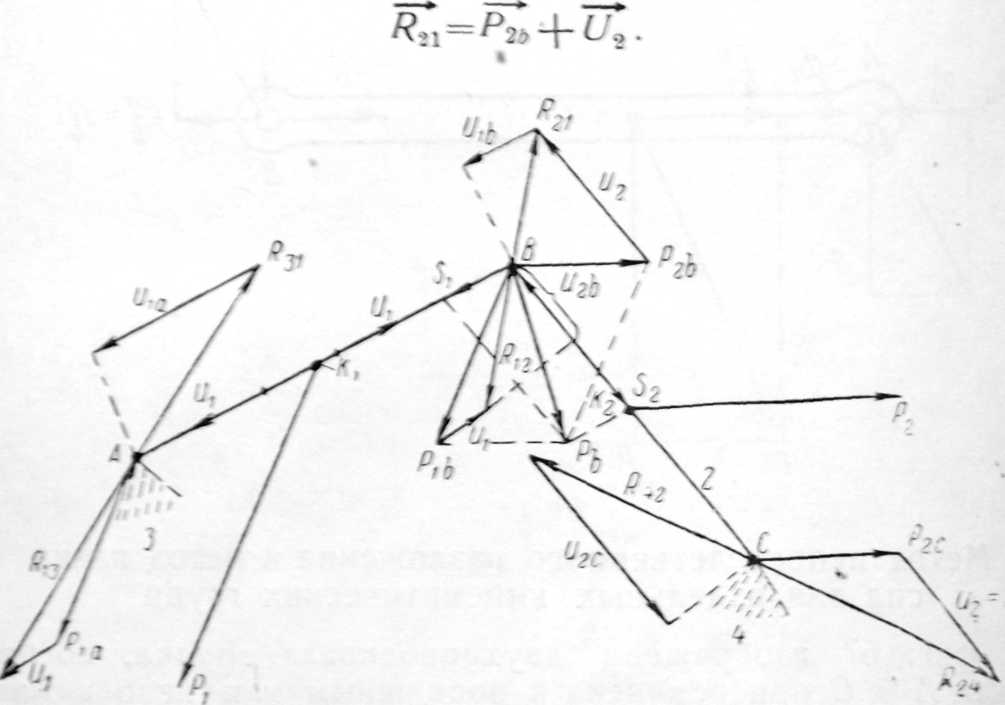
На фиг. 68 приведено то же решение задачи о равновесии диады при помощи построения плана сил. Из произвольной точки р откладываем последовательно силы Pt я А. Разбиваем их по закону параллельных сил на составляющие Р& и Р^ . и Р1в и /V Силы Р& и Ры сета- ' дываем в одну Р». Проведя из концов силы направления, параллельные звеньям диады АВ и ВС, получим усилия в стержнях U% и Ux, которые оба получаются сжимающими, как направленные к узлу* Рассматривая равновесие шарнира Л, дополняем контур U{ н Р\а до треугольника, получаем Rtx — реакцию в шарнире Д. Точно так же рассматриваем равновесие узла С, дополняя контур Р*с и U% до треугольника, получаем реак- ^
дню RA% в шарнире С.
Строя прямоугольные треугольники на и со сторонами, параллельными звеньям диады и перпендикулярными к ним, и рассматривая их как треугольники равновесия, получим усилие в стержнях Ь\л и на участке между точками прило* жения сил /С, и Д', и шарнирами Л и С Точно так же силы С/и м обратные составляющим Rtx и Rn й направлении стержней / и 2, представят истинные усилия и стержнях / и 2 на участке между точками Кх и А** и шарнирами В. Мы нндим, например* что усилие Llb получается не сжимающим, а растягивающим (как направленное от узла В) в противоположность решению, полученному первоначально, после разноса сил Рх и Р$
7 Н. И. Котом Вч
по шарнирным точкам, а усилие Uu попрежнему остается с^ тием.
Разберем теперь задачу о равновесии сил на примере тпе поводковой группы, входящей в состав механизмов 1-го клае 3-го порядка (по классификации Ассура)Ч Са
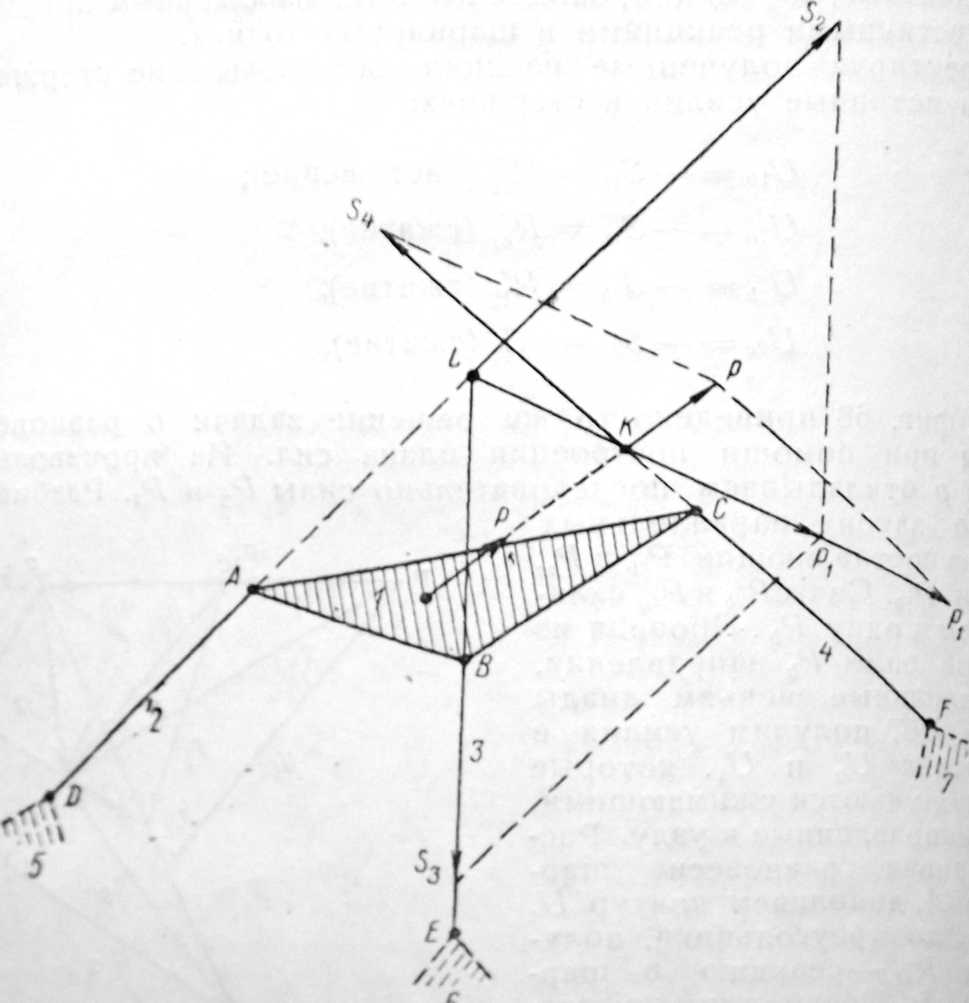
Фиг. 69.
На фиг. 69 изображена такая группа, причем шарнирами Д Јtf **РДсоеЛ1Шяется * подвижным или неподвижным звеньям & 9 Предположим для простоты, что будет задана одна сила Р. приложеяязя к базисному эвену/. Случай, когда силы приложены * шот1**ш* *• { ш4* может быть всегда сведен к случаю одно* сами р* Это следует шш того, что путем разноса сил, приложен-■** * У0****» °о методу параллельных сил мм в точках г * с »^учим усилия Я#, Л и Рш , которые, будучи слоист вмми с силой pt дадут днбо одну си*у, приложенную к эвену ^
![]()
дмоо «ару сил, ь случае одной силы мы приходим сразу к случаю, который рассматриваем теперь, а в случае пары сил можно проделать задачу два раза: сначала для одвой составляющей пары, * потом для другой, и найденные реакции геометрически
сложить.
Сначала произведем решение задачи на самой схеме группы,
а потом на отдельном построении в виде плана сил.
Переносим силу р вдоль ее линии действия в точку к — точку пересечения с направлением стержня 4. В точке к силу р раскладываем на составляющие: 54 — по направлению стержня 4 ж р\ — по направлению на точку l — точку пересечения поводков - и о, так что
Перенесем рх в l и разложим ее на направление стержней 2 и 3, получим усилия
и 55, т. е.
рх=х + х*
Искомые реакции в шарнирах Л, в, С, d, £, f и будут представлять эти силы, а именно:
31
»^з» rn— s\<

Фиг. 70.
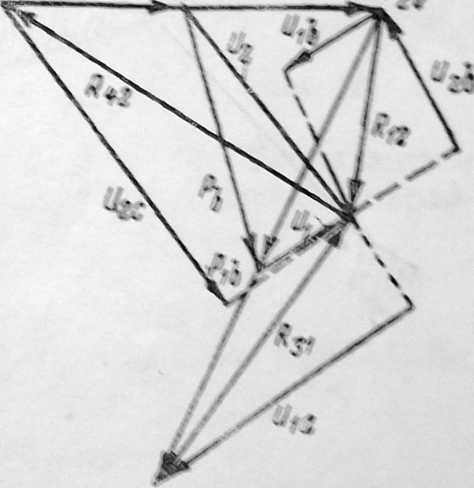
Решим ту же задачу методом плана сил.
От произвольной точки р плоскости (фиг. 70) откладываем заданную силу р. Проводим из ее концов направление, параллельное lk и cf, получаем силы рг и /?41, так что
p=px + r4l.
Из конца силы р проводим линию в направлении, параллель-вом стержням 3 и 2, получим реакции rn и /?31, так что
а вместе с тем
р-\- r*\ + r9i + r%\ — 0. Стержни 2 я 4 будут растянутыми, а 3—сжатым*
2. Метод непосредственного разложения и плана сил для
механизмов
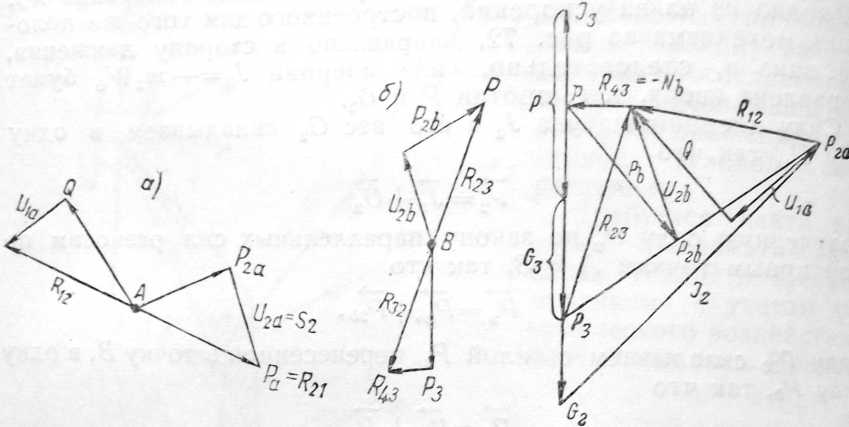
Решим теперь задачу на равновесие сил и определение давлений в кинематических парах на примере ковкретного механизма.
На фиг. 71 изображена схема вертикального двигателя Дизеля. Обозначим массу возвратно движущегося звена (поршня, штока и ползуна) через т% т Д массу шатуна т%9х у его момент инерции относительно оси, проходящей через центр тяжести С„ через/,с, массу кривошипа через т, - ' с центрам тяжести в расстоянии е{ от оси вращения О.
Движущую силу, действующую на поршень со стороны газов, обозначим через р и будем считать ее заданной. Под действием силы р двигатель будет работать и преодолевать I момент полезного сопро-
\р тивления/Ип.с, приложен-
ный к главному валу О. Величину последнего примем обеспечивающей равномерное движение с заданной угловой скоростью сох.
Требуется найти давление в кинематических парах, усилия в звеньях механизма с учетом динамического воздействия масс и сил веса. Прежде
w
Фиг. 71. Фиг. 72.
всего строим для данного механизма план ускорений (фиг. 72) и находим силы инерции всех звеньев. Сила инерции поступательно движущихся масс будет /8= — mbWb н будет направлена вверх; сила инерции шатуна У2=—m2Wc будет при-ложена на плече h от центра тяжести С2, равном
п — . ♦
И, наконец, сила инерции кривошипа, равная его центробежной силе, будет
Л--mxWCl,
где WЂt^exm7v Веса звеньев будут приложены в их центрах тяжести. Весом кривошипа пренебрежем.
Сначала решим задачу методом разложения сил на самом механизме, а потом планом сил.
Начнем с определения силы Р3 — суммарного усилия, передающегося на ползун со стороны поршня, силы инерции, посту-
100

ил гель но движущейся массы и силы веса. Сила Р3 составляется
из трех слагаемых:
где р — сила давления газов на поршень (с учетом противодавлений); G8 — вес поступательно движущихся масс. Ускорение Wtf как видно из плана ускорений, построенного для того же положения механизма на рис. 72, направлено в сторону движения,
т. е. вниз и, следовательно, сила инерции У3=—m^Wb будет направлена вверх, т. е. против Р и Gs.
Силу инерции шатуна J, и его вес G3 складываем в одну
силу Ра, так что
Х= Л + Заполученную силу по закону параллельных сил разносим по шарнирным точкам л и в, так что
Силу Р2ь складываем с силой Я3, перенесенной в точку В, в одну
силу Рьу так что
и раскладываем силу Рь на нормальную силу n0 и усилие по направлению шатуна; таким образом,
Сила nt будет представлять нормальное давление на направляющие со стороны ползуна. Она будет уравновешиваться реакцией направляющих, поэтому
Силу St переносим по ее линии действия в точку А механизма и здесь складываем с силой Р2я в одну силу 6 Рд, т. е.
Раскладываем силу Ра на составляющие: по направлению кривошипа *St и по направлению, касательному к окружности кривошипа Т, получаем
Сила 5, будет растягивать кривошип, а Т будет уравновешиваться полезным сопротивлением машин Q:
Q=[-T.
Найдем теперь реакцию в шарнирах А и В (реакция в ползуне /?43 уже найдена).
Складывая силу Р%ь с усилием Z72=—S3, получим давление звена 2 на звено 3
Величину /?з, найдем как Конечно, должно быть
Л?32~ ^23*
Фиг. 73. Фиг. 74.
Для нахождения реакции в шарнире а складываем геометрические силы р2а и u2fj=-s^ получаем /?2ь
н eft равную и противоположную
Это построение реакций выполнено для наглядности на отдельном чертеже (фиг. 73, а и б).
Что касается реакций в шарнире о, если предположить, что полезное сопротивление является силой, приложенной в а,
rii= — ui0 = — s1—j1. томЕ(3ИгЖ?0ПОЛеЗНОе сопротивление является парой с момен-
(геометрические разности сил).
^Давления в шарнире о соответственно будут в первом слу-
" во второй случае +Л
Произведем теперь решение той же задачи методом построения
плана сил (фиг. 74). Откладываем последовательно от полюса р
силы Л., Р, G3, G2 и Л. Силы 02 и /2 складываем в одну Р2, которую представляем в виде двух сил, удовлетворяющих условиям
— ^2а г *2*' Р2г> /С2Л '
где/С, — точка пересечения шатуна ан с линией действия Р2 (фиг. 71). Силу Р3 = P-f~ g2 — j% складываем с ргь в одну силу рь, из концов которой проводим направление перпендикулярно направляющей и параллельно ав; получаем усилия u2b и Р43 соответственно равенству
Из силы u\a = — C/2fr и силы Р2а путем проведения из начала первой силы и конца второй направлений параллельно уравновешивающему полезному сопротивлению Q и параллельно кривошипу oa образуем замкнутый контур, из которого и находим усилия ula =— s: и Q согласно равенству
Силы ргь и uzb складываем в одну и находим Р23 соответственно равенству
Реакцию Р4;, и силу Р3 складываем в одну и находим r$i согласно равенству
Из плана сил видно, что
Силы uta^ — и2ь и Р2а дают /?21:
а силы uu и Q дают силу
Из плана сил видно, что rl2 = — /?21.т>
') Указанные на фиг. 73 и 74 и в поясняющем их тексте усилия uoh £Л> // ■в есть истинные усилия, а вспомогательные (оперативные) усилия. служашйЗ для нахождения реакций в шарнирах Л и £. Для получения истинных усилий C/Ja нужно, согласно фиг. 67 и 68, найденные реакции /?«. и сппо штгот "а НаПраВЛСННе шатуна а Реак^ию л12-ианаправлениеМкри2о-
РАЗДЕЛ ЧЕТВЕРТЫЙ Воздействие машины на фундамент