

системы:
2U7tKT. -^суммарная работа активных сил;
2W^tiKu. — суммарная работа сил реакции связи.
В применении к машине правую часть закона живой силы можно написать подробнее, учитывая, что к активным силам относятся:
1) движущие силы, работа которых положительна и может
быть обозначена через J&Wwl
2) силы полезных со про i мл ей и й, работа которых отрицательна и которую обозначим через—jLWn,c;
8) силы собственного веса звеньев, работа которых может быть больше нуля и меньше нуля и поэтому обозначается через I 2^пес
Итак,
Что касается работы реакций связей, то ее можно разбить на две суммы — работу нормальных реакций и работу касательных связей реакций:
Принимая во внимание характеристику нормальных реакций в отношении совершаемой ими работы, данную в § 1, можно положить 2W(Rn) = 0. Что же касается работы касательных реакций, то на основании того же параграфа их работа будет всегда отрицательна.
Поэтому эти силы относят к разряду вредных сопротивлений, или к силам трения. Итак,
2W(ff/) = — 2WV
Учитывая приведенные значения работ сил активных и реактивных, действующих в машине, уравнение движения машины в развернутом виде напишется так:
Ј2-Јi = 2^b ■ -2^л.с +2^вес - -2wv (6>
В этом виде уравнение живых сил носит название уравнения движения машины. Заметим, что в правую часть уравнения (6) ни в каком случае не должна включаться работа инерционных сил, так как силами инерции учитывается инерции звеньев машины, а в уравнении (6) инерция масс уже учтена самим изменением живой силы. О правильном введении в уравнение движения сил инерции будет сказано ниже.
3. Характерные периоды в движении машины
Руководствуясь уравнением (6), можно в движении машины выделить следующие три характерных периода. Положим, что силы, действующие в машине, таковы, что суммарная работа этих
\ 14
сил постоянно остается больше нуля, т. е. О» или, дру-
гими словами, суммарная работа движущих сил больше суммарной работы всех сопротивлений полезных и вредных. На основании уравнения движения (6) будем иметь £2 - - £\ > 0, или
Е2>ЕХ
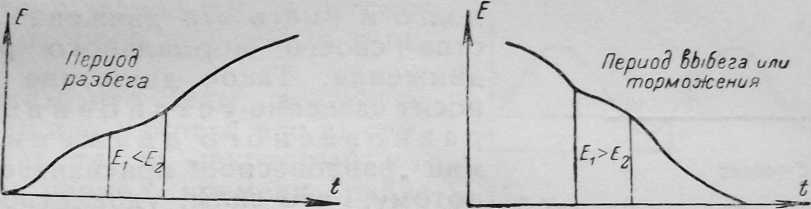
за любой промежуток времени. Таким образом, рассматриваемое движение машины можно назвать движением с непрерывно возрастающей живой силой. Естественно, началом такого движения является состояние покоя машины. Это движение длительный период времени продолжаться не может, так как с ростом живой силы связано увеличение скоростей и ускорений в частях машины, а вместе с тем и инерционных сил, которые, становясь значительной величины, должны привести к поломке машины. График такого движения, соответствующий периоду
Фиг. 3. Фиг. 4.
разбега, или пуска машины, изображен на фиг. 3; здесь по оси абсцисс отложено время, а по оси ординат — значение живой силы.
Движение противоположного характера реализуется в машине, если силы, действующие в ней постоянно, будут давать работу меньше нуля, т. е. ^ZjW< 0, или, другими словами, когда работа всех сопротивлений, полезных и вредных, численно получается больше работы движущих сил. В этом случае на основании уравнения движения (6) будем иметь Е2— Ел < 0 или,. Е2<Е1У за любой промежуток времени, т.е. рассматриваемое движение машины будет происходить с убывающей живой силой (фиг. 4).
Совершенно ясно, что и этот вид движения машины длительно продолжаться не может, так как он должен приводить машину к остановке (когда Zf=0). Практически этот вид движения реализуется в машине в период, предшествующий остановке, который называется выбегом, а также в период торможения машины, т. е. введении искусственного сопротивления. Оба отмеченных рода (с Е9 > Et и Е2 < Et) характерны тем, что хотя они и кратковременны и не могут поэтому являться нормальным рабочим движением машины, однако каждая машина непременно проходит через стадию этих движений, имея неизбежный период пуска и период остановки. Оба рассмотренных типа движения носят название неустановившегося движения машины.
Перейдем теперь к рассмотрению такого вида движения машины, которое уже может продолжаться неопределенно долгий промежуток времени и при котором, следовательно, машина может нормально работать. Положим, что действующие в машине силытаковы, что суммарная их работа равна нулю2$=0 за любой промежуток времени, т. е. за любой промежуток времени работа движущих сил равна работе всех сопротивлений полезных и вредных. На основании уравнения движения (6) в этом случае получим е2 — ег = о или е2 = е1 за любой промежуток времени, или, другими словами, машина будет двигаться с постоянной живой силой
£ = const.
График такого движения изображен на фиг. 5. Это движение «е приводит ни к разносу машины, ни к остановке, поэтому машина, имея такое движение, может работать неопределенно
долго и иметь это движение в каче-i* стве своего нормального рабочего
движения. Такое движение машины ________ носит название установившегося
равновесного движения. Тер-Ј=const мин „равновесное" присваивается ему
J_ tm потому, что силы, удовлетворяющие
ф , условию 2^=0 за любой промежу-
ток времени, будут удовлетворять и условию *Јdw = 0t где dw — элементарная работа сил, а равенство нулю суммы элементарных работ на возможных перемещениях системы и есть общее условие равновесия на основании принципа возможных перемещений. Можно рассуждать и таким образом: силы, удовлетворяющие условию 2№=0за любой промежуток времени, как видели, на основании уравнения движения не в состоянии изменить кинетической энергии машины. Поэтому, если начальная кинетическая энергия машины была равна нулю (т. е. машина находилась в состоянии покоя), то она и впредь под воздействием таких сил будет находиться в покое, а силы, которые не в состоянии привести нежесткую систему в движение, представляют собой уравновешивающиеся на этой системе силы.
Для машин с несложной кинематической структурой, определяемой тем, что при любом движении ведущего звена соотношение угловых и линейных скоростей остается неизменным, не зависящим от угла поворота этого звена, движение с /: = const чрезвычайно просто. Оно будет представлять собой ряд равномерных поступательных и вращательных движений звеньев. Следует это из того, что в машинах указанного типа (с постоянным отношением угловых и линейных скоростей) при равномерном движении ведущего звена все остальные звенья будут совершать равномерное движение, а поэтому общая живая ома, равная сумме живых сил отдельных звеньев, не будет изменяться. Механизмы такого рода машин можно характе-16 ризовать, как механизмы, имеющие постоянные передаточные числа. Примером могут служить грузоподъемные машины, тали, полиспасты, транспортеры, элеваторы и т. п. Все они характерны тем, что при равномерном движении их ведущего звена, все остальные звенья движутся равномерно, а вместе с тем с постоянной живой силой. Итак, для машин, механизмы которых характеризуются постоянством передаточного числа, движение равновесное есть вместе с тем и равномерное, называющееся в этом случае равномерным установившимся движением. В машинах, механизмы которых не имеют постоянных передаточных чисел (примером могут служить машины, в состав которых входят шарнирные механизмы, кулачковые, некруглые зубчатые колеса), движение с •£ = const трудно практически осуществимо, и для них движением при нормальном рабочем режиме будет движение не с £ = const, а другой тип установившегося движения, к рассмотрению которого мы сейчас и перейдем.
Положим, что силы, действующие в машине, таковы, что их суммарная работа за некоторый постоянный период времени равна нулю, т. е. (2^)за период = 0. Периодом практически бывает время одного, двух или нескольких оборотов машин. График работы таких сил изображен на фиг. 6, а. Хотя работа здесь обращается в нуль на промежутках времени и
*i "В ^2> но периодом для обращения в нуль работы, очевидно, нужно
считать промежуток 012 = t2и т. д. Как будет двигаться машина при таком графике работ? Ответ на это даст'^опять уравнение движения (6). Согласно ему получим
(е.2 е^зл период == 0, или {е2~ех>)гъ период»
т. е. получаем движение с периодически изменяющейся живой силой. График этого движения изображен на фиг. 6,0. Кривая графика такова, что она полностью соответствует графику работ. При одинаковом масштабе для £ и 2^ она просто будет повторять собою кривую работ. Движение, соответствующее графику фиг. 6, б, очевидно, не приводит ни к разносу машины, ни к ее остановке, вместе с тем оно может протекать неопределенно долгий промежуток времени. Поэтому такое движение называется у ст а н о в и в ш и мс я, а для отличия от предыдущего типа оно может быть названо н a jj n п н п в %sji\q м % с т а
дей-сле

новившимся, имея в виду, что она сЬН^ДМЭгИЬКАод
ствием сил, способных изменять кинет
2 ни. колчин
Механизации и
LY1C4 I п по ЦД" «и Ж.—»-*—■-g
довательно, неуравновешивающихся. Более подробное исследование этого вида движения машины, которое будет изложено ниже (гл. VIII), показывает, что оно сопровождается периодическим изменением угловой скорое i и главного в i л а машины, поэтому его часто называют установившимся периодически неравномерным движением. Практически такой род установившегося движения имеет в качестве нормального рабочего движения все поршневые машины — двигатели, насосы, компрессоры, а также станки с во шратнопоступательно-движу-щимися массами (шепинги, продольно-строгальные, штамповочные прессы и т. д.).
Сопоставляя оба вида установившегося движения машин — равновесное и неравновесное,—можно сказать, что неравновесное движение есть движение с постоянной средней за период живой силой, а равновесное — с постоянной мгновенной живой силой. Ввиду большого значения отмеченных разновидностей установившегося движения машины при эксплоатации машин, как их нормальных рабочих движений, перейдем к более подробному изучению установившегося движения.
Глава II
УСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ МАШИНЫ (РАВНОВЕСНОЕ
И НЕРАВНОВЕСНОЕ)
1. Закон передачи работы
Неравновесное движение является более общим типом установившегося движения, чем равновесное, которое можно считать как бы частным случаем неравновесного. Поэтому изучение установившегося движения будем вести на примере неравновесного установившегося движения. Соответственные выводы %без оговорок будут справедливы также и для случаев равновесного установившегося движения.
Как уже знаем из предыдущего параграфа, характеристикой неравновесного установившегося движения является
за период
= 0, (а)
вместе с тем и
(^2 ^l) за период === 0 •
Условие (а) в развернутом виде может быть записано так:
(2 ЭД^дв ) за период —(2 ^п.с) за период ~Ь (2^»»сс ) за период —
— (2 ^тр)за период =0- (7)
В этом в чае уравнение движения носит название уравнения работ. Если периодом в работе сил является время одного или нескольких оборотов машин, то работа весов обратится в нуль, так как центр тяжести отдельных звеньев машины через
18
каждый период будет оказываться в своем первоначальном положении. Поэтому
(2 ^вес ) за период =ж О,
вместе с тем ур-ние (7) упрощается и, будучи решено относительно 2^дв» дает
(2 ^дв ) за период = (2 Wn. с ) за период -f- (2 И^тр ) за период • (8)
В этом виде уравнение работ носит название закона передачи работы в машинах. Словами оно формулируется так: при установившемся движении машины (неравновесном "или равновесном) работа движущих сил за период затрачивается полностью без избытка или недостатка на работу полезных и вредных сопротивлений. Для равновесного движения мы можем в ур-нии (8) опустить скобки с указанием периода, так как уравнение работ будет иметь место для любого промежутка времени, но только в этом случае в правой части должна остаться рабэта сил веса. Ввиду того, что с ур-нием (8) постоянно приходится иметь дело, его нужно уметь представить в более простой форме. Условимся в дальнейшем, когда это не будет оговорено особо (2^) за период > обозначать просто через W, понимая под W и сумму работ и ее расчет за период. Тогда ур-ние (8) перепишется так:
^дв = W„mC +Н/тр . (8а)
2. Механические характеристики машины
Существенно заметить, что в ур-ниях (8) и (8а) все работы входят со знаком плюс, в то время как в ур-нии (6) каждая работа входит со своим знаком. Так как во всякой реальной машине трение существует, то в ур-нии (8а) WTp >0, следовательно,
W,B>Wn. с . (86)
Это первый важный вывод для установившегося движения машины, заключающийся в том, что при установившемся движении работа движущих сил за период больше работы полезных сопротивлений за тот же период. Разность ЩАВ —Wn. с носит название механической потери в машине:
Сравнивая это с ур-нием (8а) видим, что
Wnor=Wrp.
Таким образом, потерянная работа как раз равна работе трения.
О механических потерях в машине часто судят не по абсолютной величине потерянной работы, а по отношению ее величины к работе движущих сил, которую иначе называют еще за-
траченной работой. Это отношение -^г принято обозна
*
чать через f и называть коэфициентом потери маши н ы. Таким образом,
_ wпот _w тр /л.
Заметим, что этот коэфициент потери во всякой реально существующей машине всегда больше 0 и не больше 1, т. е.
0<<р<1.
Чем меньше в машине работа трения, чем меньше ее коэфициент потери, тем машина в механическом отношении более совершенна, тем больше в ней работа движущих сил (или затраченная работа) будет приближаться к работе полезного сопротивления (или к полученной работе), т. е. машина будет с большим полезным действием.
О полезном действии машины принято судить не по абсолютной величине полученной работы (или работы wn. с ) на определенное количество затраченной работы (или работы ), а по их отношению, которое обозначают через г\ и называют коэфициентом полезного действия:
г1=^ . (10)
На основании неравенства (86) получаем, что у\ во всякой реальной машине будет меньше 1, но больше 0 при существовании wn.z, только когда wn.с=0, он делается равным 0. Поэтому пределы изменения -ц будут
0<7]<1.
Между коэфициентами т) и ф имеется определенная математическая связь, которую получим на основании ур-ний (10), (8а) и (9):
или
-4=1—?. (11)
Поэтому, ерли коэфициент потери ф = 0,05, то тем самым коэфициент полезного действия будет *j=0,95.
Смысл ведения коэфициентов т) и ф заключается в возможности косвенного учета работы трения в машине. Из уравнения работ (8а) имеем
/ w \
Wnc =w№ — Wrp = W„ 1— ■ =И^яз (1—f)= ^двг). (12)
\ дв /
Иногда для косвенного учета работы трения пишут уравнение работ так:
Wr»-WB.e+4^ = Wro..(l+J^)eWr-.e + (13)
Здесь величина представляет коэфициент потери, который выражает работу трения не в долях работы WAU (как ?), а в
ДОЛЯХ Wn. с •
На основании ур-иий (12) и (13) будем иметь между коэффициентами ff, <|i и к) следующую зависимость:
Поэтому, если ?=»0,05 и ?) = 0,95, то ф = — 0,0526.
ч
Уравнению работ можно придать другой вид, если разделить обе его части на время периода т. Величину 1т будем называть средней мощностью силы и обозначать через Л/ср. Единицами n
являются-, или л* г.=75 - -, или киловатт = 1,36 л. с. =
сек сек
= 102 — . сек
Тогда уравнение работ примет вид:
WAB «iVn. с +iVTp . (15)
В этой форме оно носит название закона передачи средних мощностей.
Пользуясь им, можно установить понятие о тех же коэфи-циентах для косвенного учета потерь, как и раньше, когда мы исходили из ур-ния (8а). Поэтому
w ДВ * дв ^дв 1 дв "л. с ^п. с
Заметим, что в поршневых двигателях Л^дв измеряетсяприбором индикатором и носит название индикаторной мощности и обозначается через nt, а мощность nn. с называется эффективной мощностью и обозначается через Л/аф; в насосах и компрессорах, наоборот, мощность отдаваемая, или мощность Л/п. с , измеряется индикатором, поэтому носит название индикаторной мощности и обозначается через nt .
Пример. Индикаторная мощность в паровой машине = = 150 л. с. Механический коэфициент полезного действия ^=0,85. Машина работает при установившемся движении. Найти эффективную мощность машины, мощность трения и коэфициент потери.
Из уравнения работ имеем:
^Л^ —M-p-ty (1 — ?)=iV7 rJ== 150-0,85= 127,5 л. А/тр « 150—127,5 = 22,5 л. с.\
?«1-т)«0,15, или ^-0,15.
Коэфициент полезного действия сложной машиндСЬ зависимости от коэфициентов полезного действия входящих в нее
механизмов и передач
Машина в общем случае представляет сложный комплекс отдельных передач и механизмов, поэтому правильная оценка потерь на трение, суммарно для всей машины целиком, часто представляет большие затруднения и ведет или к переоценке этих потерь или, наоборот, к недооценке. Здесь большую помощь оказывает общая теорема, касающаяся зависимости к. п. д. всей машины от к. п. д. ее отдельных составных частей, оценивать потери в которых в отдельности бывает гораздо проще Вскроем эту зависимость.
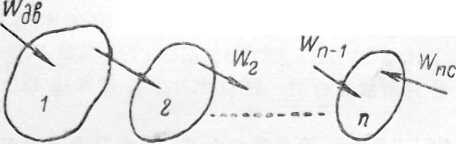
Последовательное соединение. Ввиду общности теоремы будем производить вывод, предполагая машину изображенной условно в виде ряда отдельных частей, передач или звеньев /, 2,. ., п, как изображено на фиг. 7. Пусть звено 7 будет ведущим
звеном машины, а п рабочим или исполнительным; работу движущих сил, приложенных к звену 7, обозначим через WUBy работу сил полезного сопротивления, снимаемую с последнего звена,— через W„. с . Предполагая установившееся движение машин и наличие потерь на трение, будем иметь Wn. с < WAb • Отношение этих работ может быть названо общим коэфициентом полезного действия всей машины
w
w п. с ,
**)общ
Фиг. 7.
w
дв
Обозначим через Wx работу, передаваемую звеном 7 звену 2. Ввиду потерь на трение в звене или части машины 7, будем иметь V7a< Р/дв . Поэтому, естественно, отношение этих работ назвать коэфициентом полезного действия 1-й составной части машины или звена 7:
дв
Точно так же установим понятие о коэфициентах полезного действия в звеньях 2, J и т. д. до п, а именно
w2
"Ля—1 w п-\ . w п-2
w
чп
Вышеприведенные равенства перемножаем почленно: IP, w« w* wn; W
t)iTbtU • • • "Ля—1 т\п ~
W.
2
= *) (17)
Таким образом, устанавливается искомая общая зависимость между общим коэфициентом полезного действия машины и
частными коэфициентами полезного действия ее механизмов, т< е. общий к. п. д. сложной машины равняется произведению частных к. п. д. Несмотря на кажущуюся общность вывода формулы для т)0бЩ» полученная зависимость верна не всегда Именно она верна лишь для машин, схема передачи сил и работы в которых удовлетворяет фиг. 7. Фиг. 7 соответствует предположению так называемой последовательной передачи работы и с ил ы, когда работа и сила от одного звена передаются другому, с ним смежному, за исключением соответствующих потерь.
На основании соотношения (17), учитывая что каждый Участи < 1, получаем, что %бЩ будет меньше всякого частного % и будет тем меньше, чем, больше последовательных передач имеется в машине.
При оценке трения в машине коэфициентом потери ср на основании ф-лы (17) получим следующую зависимость между ф общим и ср частным:
1 - <робщ * (1 - — ft) . • • 0 — *") »
или
?общ — ft + ft + ft' + • • • + ft — ft ft — ft ft " • • • ~ ft—1 ft +
+ ftҐaft + - • •
Предполагая, что коэфициенты потери малы, можно пренебречь произведениями коэфициентов по два, по три и т. п.; тогда получим
f общ S ? 1 + ft +* ft + • - • + ft >
т. е. приближенно общий коэфициент потери равен сумме частных коэфициентов потерь. Точно так же можно показать, что
♦ a^i+tt++f + ••• + ♦«• О9)
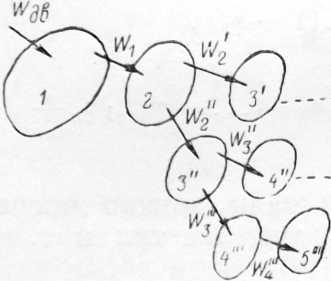
В машинах с более сложной структурой, чем на фиг. 7, наряду с последовательной передачей работы и силы часто имеют место разветвления по пар «ллельным передачам. Подсчет зависимости общего к. п. д. от отдельных частных к. п. д. в этом случае усложняется и требует специального расчета для каждого конкретного случая передачи.
Смешанное соединение. Чтобы уяснить порядок нахождения общего коэфиииента полезного действия, в этом случае обратимся к фиг. 8 Здесь от звена / к звену 2 передается вся работа, за исключением потерь в звене 1. Со звена 2 имеет место разветвление в передаче работы. Часть работы WL направляется по последовательному ряду звеньев от .5' до п' и затрачивается на работу против W'nc, а часть W" передается звену Ь\ чтобы с этого звена направиться по двум паоаллепь-ным передачам: по ве.ви 4\ 5",,..п" для работы против W* и по ветви #*, 5-,ц../Г для работ против tt^ с, Коэфициент полезного действия последовательного ряда звеньев /, 2, 3',... пг обозначим соответственно через r\lt r\2t %, •.. %*, отдельные к. п. д. последовательного ряда звеньев в параллельной пере-даче, отмеченной значком ", назовем через ^,*%*» i\'n и, наконец, частные к. п. д. третьей параллельной передачи обозначим соответственно т^"» ^5",.. .-г^'.
Мысленно отключая в машине звено 3" с соответствующими передачами и обозначая частичную работу движущих сил, затрачиваемую на W'n с через WAB > получим на основании уравнения работ и значения к. п. д. для последовательных передач
w'_
W" =
дв
п. с
точно так же, отключая передачи с номерами звеньев 3\ 4',.',. п'
и 4
п, получим для частичной работы движущих сил
выражение:
"5а ■
п
К-1
W =
дв
W3
по
![]()
Аналогично при отключении ветвей, обозначенных значком ' и значком ", получим
Фиг. 8.
дв
Складывая приведенные три равенства, получим
W ="7дв+^дв+^дв =
+
Имея выражение для Р/дв, а также для "7П. с:
I wrn.«-wr;.«.+«?;..+ J
получим выражение для общего к. п. д.
+
п. с
1Гд<
ilrJ2ri3
w.
(20)
Mt/2y*
т. е. в случае последовательных и параллельных передач общий к. п. д. зависит от числа параллельных ветвей в передаче, от распределения мощности по каждому параллельному разветвлению и от числа последовательных передач в каждой отдельной параллельной ветви.
11
мер 1. Случай машины с последовательной передачей.
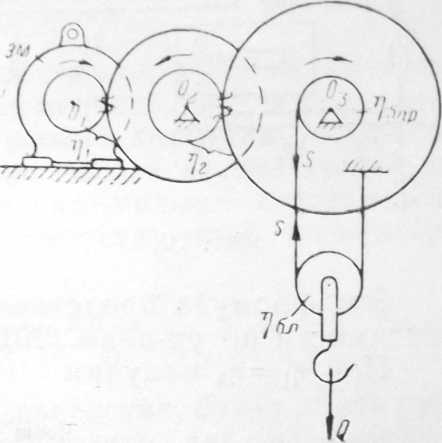
Грузоподъемная лебедка, приводимая в движение от электро-мотора (фиг. 9), состоит иэ двух пар зубчатых колес, барабана,
полиспаста и рассчитана для подъема груза Q= 10 т со
скоростью V—\2 м мин,
Определить необходимую мощность электромотора, если к. п. д. каждой пары зубчатых колес 7)1=tj1=0,93, к. п. д. барабана rv4,0 = 0,94, к. п. д. блока т)б = 0,96.
Примечание. Коэфициенгом полезного действия зубчатых колес учитываются как потери на трение в зубцах от окружных сил. так и потери на трение на осях от тех же окружных сил. К. п. д. барабана учитывается добавочное трение на оси барабана от натяжения троса 5, а, кроме того, сопротивление жесткости троса в процессе навивания его на барабан. т;б учитывается трение на оси блока и сопротивлении жесткости ветвей троса при огибании блока.
Решение. В данном случае NAB =Мъи —мощность электромотора.
ДОп с =Nrp —мощность груза. Для установившегося движения будем иметь
гр
гр
Фиг. 9.
Имея в виду, что в рассматриваемой лебедке работа передается последовательно от звена к звену, будем иметь
'loom
=*П1^бар Чб = 0,93*.0,94-0,93=0,78.
Полезная мощность NTp будет
QV
а следовательно,
75-60
10 000-12 = 75-60
26,5 0.78
26,6 л. Щ
34 л. с.
р ИМе р !2. Случай устройства" с чисто параллельными передачами. От локомобиля (фиг. 10) мощность двумя параллельными ременными передачами передается на два трансмиссионных вала / и //. На вал / должна быть передана мощность Ыг=\Ь л. с.9 а на вал //—7V2=10 л. г. Найти эффективную мощность локомобиля1), если к. п. д. ременных передач тг)1=т)2=0,95.
Решим сначала задачу в общем виде. При установившемся движении будем иметь
1общ
(а)
) Т. е. мощность на главном валу локомобиля.
Однако для определения т)обш мы не имеем права перемножить и Yj2) так как га главном валу локомобиля происходит разветвление передаваемый мощности. Часть мощности идет к валу /, я часть к валу //. Эти частичные мощности обозначим через ы'лок и n"mk. Так как они передаются на валы / и Я уже без ответвлений, то будем иметь
лок ^ » лок 7)2
Складывая эти равенства, получим

К
lb
Фиг. 10.
Таким образом, при определении мощности двигателя мы обошлись без знания т1общ. Если все-таки rio6lu требуется оценить, то на основании (а) получим
Nx + N2 Nj + Nz
Эта формула представляет частный случай более общей за висимости по ур-ниям (20). При %=t)q получим
_ Nx + N2
Цобш - ~j--ж 41' ■
(Ar1+yv2)
Поэтому для данного примера будем иметь
Л/лок =
*, + лгг_,5+.о g а
0,95
ГЛАВА Ш
ЗАКОН ПЕРЕДАЧИ СИЛ В МАШИНАХ ПРИ РАВНОВЕСНОМ
ДВИЖЕНИИ
1. Вывод закона передачи сил
До сих пор в наших уравнениях, описывающих движение машины, силы не были введены явно, а входили в уравнение движения через их работу или мощность. В некоторых задачах механики машин вопрос о силах самих, а не их работах или мощностях играет первенствующее значение. Например, это имеет место в вопрос х расчета на прочность частей машины, затем в расчетах, связанных с машинами, предназначенными в основном для передачи сил, а не работ, каковыми являются, между прочим, ручные механизмы, например, ручная лебедка. В последней передаваемая работа и мощность вес тельны (меньше I ./. с), а действующие усилия на звеньях, разделенных от ведущего звена большим передаточным числом.
могут достигать величины нескольких тонн.
Во всех этих случаях будет несравненно выгоднее попытаться аз уравнения движения получить выражение, непосредствевно
содержащее силы, к чему сейчас и перейдем.
Чтобы на первых порах не слишком усложнять вывод и получить результат в наиболее простой форме, ограничимся в вопросе определения соотношения сил в машине случаем установившегося равновесного движения, т. е. движения, происходящего без изменения живой силы (стр. 16). Мы знаем, что для такого движения уравнение работ будет иметь место не только для конечного промежутка времени, но и для бесконечно малого:
dww = ri\vn.c ±d\voec +dwntp.
В правой части уравнения, в противоположность случаю, когда уравнение работ применялось для периода движения машин, кратного числу оборотов, и когда можно было не включать работу весов1), введена элементарная работа весов. Чтобы не иметь уравнение движения с бесконечно малыми слагаемыми, разделим обе части уравнения на соответствующий элементарный промежуток времени:
dt ~~ dt ± dt *~ dt *
Слагаемые, фигурирующие в этом равенстве, будут иметь размерность мощности и будут представлять так называемые мгновенные мощности сил
При таком обозначении предыдущее уравнение примет вид
ДОдв=М,.с ±М,ес +МР. (21)
Это уравнение носит название закона передачи мгновенных мощностей и словами может быть сформулировано так: при равновесном движении машины мгновенная мощность движущих сил расходуется на мгновенную мощность полезных и вредных сопротивлений и мгновенную мощность весов тех звеньев, центры тяжести которых в данный момент поднимаются. При наличии в машине звеньев, центры тяжести которых в данный момент опускаются, их мощность будет уменьшать на соответствующую величину мощность движущих сил. В выражение (21) все отдельные мощности входят по своему абсолютному значению, т. е. без знака.
Понятие мгновенной мощности к понятию средней мощности Л/ф =у, установленный в гл. II, § 2, находится в том же соот-
>) Так как за период, кратный числу оборотов, работа сил тяжести звеньев обращается в нуль.
ношении как понятие скорости в данный момент ~~ к средней
v
скорости -г-. Смысл понятия «мгновенная мощность" раскрывается
следующим образом* Выражение элементарной работы, как известно» будет
dW^PdS cos (Рь dS)9
где Р—сила, dS — элементарный путь ее точки приложения. Следовательно,
ЛГ= 5- - »И~С**> = RVcos (Я, V). (22)
Понятие «мгновенная мощность» ценно тем, что ее выражение совершенно не зависит от того, будут ли факторы, входящие в нее, т. е. Р% V и cos (Я, К), постоянными или переменными; во всех случаях получим одну и ту же формулу и значение выражения мгновенной мощности. Совсем иначе обстоит дело с выражением средней мощности. По определению имеем
J dw Г ndt J ЯК cos (р, v) dt /vCp — j — r — /a _ |- — § _ t{ • V^J
Значение интеграла, входящего в выражение средней мощности, существенно зависит от того закона, по которому на промежутке времени t% — ti меняются р, V и cos (Р, !/)•
На практике закон изменения этих факторов часто бывает настолько сложным, что интеграл приходится вычислять лишь приближенно, чаще всего при этом пользуются графическими методами.
Желая получить уравнение, связывающее силы, действую* щие в машине, в наиболее общей форме, не ограничиваясь случаем постоянных сил, скоростей и углов, составляемых силами с направлением скоростей и их точек приложения, мы и преобразовали уравнение движения к форме закона передачи мгновенных мощностей [ур-ние (21)].
Рассмотрим сначала случай, когда мощностью сил веса можно пренебречь сравнительно с мощностью движущих сил и полез- ж ных сопротивлений или когда центры тяжести звеньев не перемещаются. Тогда ур-ние (21) перепишется так:
Л/дв =М,.С +Nrp . (23а) I
или, учитывая мощность трения через коэфициент полезного действия, получим
ль =^-. 1
т)
Это соотношение и будет у нас являться исходным при выводе уравнения, связывающего действующие в машине силы. Принципиальное отличие этого уравнения от ранее имеющегося (стр. 21) заключается в том, что здесь фигурируют не сред
ние мощности, а мгновенные, и соответствующий коэфициент
полезного действия тоже будет мгновенным коэфициеи-
том полезного действия.
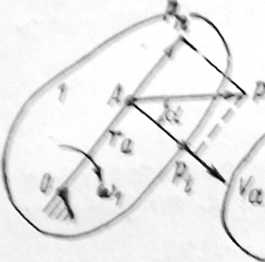
В виду достаточной общности того соотношения между силами, которое мы хотим установить, вывод будем строить в предположении машины не в виде конкретной схемы, а в виде условной схемы, как изображено на фиг. 11. Здесь звено / — ведущее, ал - последнее из ведомых (рабочее или исполнительное звено). К ведущему звену в точке а приложена движущая сила Я, составляющая с направлением скорости va в точке а острый угол а. В точке в рабочего звена приложена сила Q полезного сопротивления машины, составляющая с направлением скорости vb точки в тупой угол р. В предположении незначительных весов звеньев и считая, что движение машины под влиянием сил р и Q будет равновесным установившимся
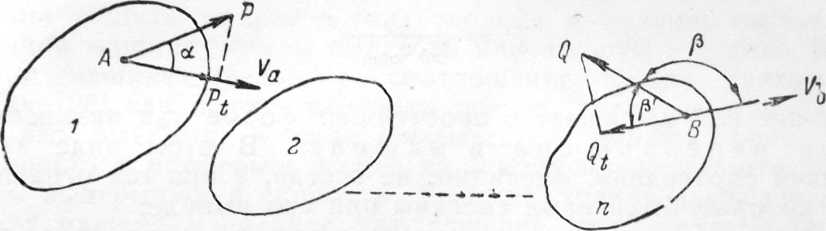
Фиг. 11.
движением и учитывая трение в машине через общий к. п. д., получим на основании уравнения мощностей (23а)
принимая во внимание, что движущей силой является Р, а полезным сопротивлением Q. В развернутом виде это уравнение дает
П1/ |Q VB cos р| pva cos a = .lv -—.
Знак абсолютной величины здесь внесен потому, что в законе мощностей все мощности входят со знаком плюс. Косинусы углов а и р, входящие в это уравнение, с одинаковым правом можно отнести к силе и к скорости. Отнесем их к силе и вновь представим уравнение так:
(Pcosa)l/0 = ^i^. (а)
По чертежу (фиг. 11) видим, что Pcosa есть проекция силы Р на направление скорости или составляющая силы Р в направлении скорости Va. Обозначим ее через Рп т. е.
Р,= Pcosa (24)
и назовем ее касательной движущей силой так же |Qcosp| будет составляюшей силы Q по линии действия скорости vb ; обозначим ее через Qt, таким образом
Q, = |Qcos р\ = Qcos 3',
где (s' — пополнение угла 3 до 180°. Сила Qt носит название касательного полезного сопротивления. Вместе с тем уравнение (а) перепишется так:
Разделив обе части на vа и обозначая через iab отношение
у
-г^, назовем это отношение передаточным числом между точками
у ъ
а и в\ тогда соотношение между действующими силами в машине получим в следующем виде:
Р,= . Qt . (25)
Lab *1общ
Ур-ние (25) выражает в простейшей форме так называемый закон передачи сил в машине. В этом виде закон передачи справедлив, очевидно, не всегда, а при тех ограничениях, которые были нами сделаны при его выводе:
1) при наличии в машине рав-овесного движения, т. е. движения с Е — const, или равномерного движения при условии = const;
2) при пренебрежении влиянием сил собственного веса звеньев.
Следует вместе с тем подчеркнуть, что никакого ограничения в отношении пространства или непостоянства сил Pt и Qt, а также и iab для применения этого закона в полученной форме не имеется. Это следует именно из того, что при его выводе мы исходили из уравнения движения машины в форме уравнения мгновенных мощностей, слагаемые в котором сохраняют свое значение вне зависимости от того, будут ли входящие в него факторы переменными или нет.
Сделаем еще один вывод в связи с ур-ннем (25). Если это соотношение справедливо только при движении машины с Е = const, то, наоборот, если действующие в машины силы оказываются в таком между собой соотношении, что удовлетворяют данному уравнению, то они автоматически обеспечат движение машины с Е — const или равномерное при iab = const.
Забегая вперед, укажем, что при учете влияния сил собственного веса звеньев закон передачи сил усложнится и будет иметь в правой части уравнения целый ряд слагаемых, зависящих от отдельных сил веса и соответствующих передаточных чисел. При неравновесном движении машины, т. е. движении с ЕФ const, правая часть закона передачи сил, кроме того» усложнится присутствием целого ряда слагаемых от сил инерции.
Применим закон передачи сил к идеальной машине, т. е. к машине без трения. Для такой машины поэтому выра-
жение 25) обращается в
р =Ol
* *at> 9
ЕЛИ
т. е. в идеальной машине касательные силы передаются в отношении, обратном скоростям их точек приложения; таким образом, сколько выигрывается в скорости, столько проигрывается в силе, и наоборот Соотношение (26) для идеальной машины представляет одну из форм так называемого золотого правила в механике. При помощи этого соотношения в первом приближении, отвлекаясь от влияния трения, можно быстро при помощи одного кинематического исследования механизма решить вопрос о том, сколько в лучшем случае мы в данной машине можем выиграть или проиграть в силе. В реальной машине идеальное соотношение между силами по ур-нию (26) нарушается влиянием трения. Трение всегда влияет так, что выигрыш в силе оказывается меньше проигрыша в скорости и проигрыш в силе не компенсируется соответствующим выигрышем в скорости. Влияние трения искажает в реальной машине идеальное соотношение между силами за счет присутствия в законе передачи сил коэфициента полезного действия*
Назовем силу Я,, удовлетворяющую равенству (26), идеальным движущим касательным усилием и обозначим ее через Я/#, т. е. положим
Я/0==Д', (27)
тогда закон передачи сил (25) нам даст
![]()
или
г,«^. (28)
Точно так же, называя усилием Qa удовлетворяющее ур-нию (26), идеальным касательный полезным сопротивлением и обозначая его через Qt., т. е. полагая
Qi* = iabPt> (29)
из закона передачи сил получим
Qt*=Qt.n,
П <?// (30'
Из выражений (28) и (29) следует, что коэфициент полезно действия может быть выражен через отношение сил. До сих пор мы имели к. п. д. как отношение работ или как отношение мощностей. Закон передачи сил (25) уже показывает, что мгно-
венный к. п. д. может быть представлен, как отношение при
наличии в механизме 1аь= 1- Введение же понятия об идеальной движущей силе и идеальном полезном сопротивлении на основании формул (27) и (29) позволяет рассматривать г\ как отношение сил и при iabzjbl. Так как понятие об идеальных движущих касательных силах и идеальном касательном полезном сопротивлении может быть распространено со случая равновесного движения на любой другой вид движения машины, именно установившегося неравновесного и неустановившегося, то определение к. п. д. по формулам (28) и (30) нужно рассматривать как более общее определение к. п. д., чем данное первоначально, в виде отношения работ или мощностей полезного сопротивления к работе или мощности движущих сил.
2. Применение закона передачи сил к равновесному движению машины без учета сил веса
Закон передачи сил, установленный нами для равновесного движения машины без учета веса звеньев, одинаково применим для случая постоянного или переменного передаточного числа при наличии в машине звеньев с любым видом движения как
плоским, так и пространственным. Сначала рассмотрим примеры на случай, когда в механизме машин передаточное число остается постоянным; особо рассмотрим случаи, когда части машины совершают лишь одно вращательное движение, и, наконец, разберем случаи наличия в машине плоских механизмов с переменным передаточным числом.
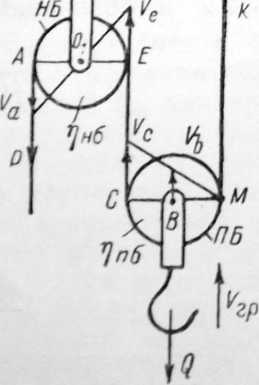
Случай машины с механизмами, имеющими постоянные передаточные числа. Простейшим примером машины с постоянным передаточным числом, имеющей звенья, совершающие наряду с вращательным и поступательным движениями также и плоскопараллельное движение, являются различного рода блочные системы. Пусть мы имеем полиспаст, состоящий из одного неподвижного и другого подвижного блока (фиг. 12). Коэфициент полезного действия неподвижного блока примем равным т)„.б = 0,94, а коэфициент полезного действия подвижного блока г\а.б == 0,96. Эгими коэфициенгами учитываются потери на трение в осях блока и потери от жесткости гибкой связи. Почему к. п. д. подвижного блока получается выш*
const
Фиг
неподвижного, выяснится в отделе трения машин (часть IV) при рассмотрении вопроса о жесткости гибких тел. Вес поднимаемого груза Q = 100 кг. Требуется найти величину тягового усилия Р для равномерного подъема груза.
Так как в данном случае равномерному движению груза будет соответствовать равномерное поступательное и вращательное движения всех подвижных частей, то живая сила системы не будет меняться, и мы вправе применить для решения задачи закон передачи сил в той форме, как он был установлен в предыдущем параграфе. Обозначим через А точку сбегания каната с неподвижного блока и через В— ось подвижного блока, лежащую на линии действия силы Q и имеющей скорость груза vb=vrp . Учитывая, что в данном случае Р/ = Ри (?, = <?, так как сила р совпадает с направлением скорости, а у силы Q совпадает со скоростью линия действия, будем иметь закон передачи сил в следующем виде:
Ввиду наличия в данном механизме последовательного соединения блоков, определим общий к. п. д. по формуле
т] = 71н.бт)п.б =0,94-0,96 = 0,90.
Для нахождения передаточного числа iab=VjVt учтем, что подвижной блок в данный момент имеет мгновенный центр в точке М — точке касания его окружности с неподвижной ветвью каната МК\ следовательно, скорость У с будет равна
Скорость Ve без изменения передается в точку е, так как канат не растяжим, поэтому
V = V .
r е г с '
ve же без изменения величины передается в точку .4, следовательно,
Va = Vc = Ve = 2Vb,
откуда
^ = vt = 2' Поэтому усилие р будет
2*)н.б '%.б ~~ 2-0.90 — ™>°"г
Таким образом, данный механизм, несмотря на потери на трение, дает выигрыш в силе
С — 100 1 Q i й v с мл we f\ получил см
1 шшшм^
* ВЫИГРЫШ
_ ^ и* был бы
^jab /> н р характеризует величину тягового wmmfQ^Lm<m ш трение. * носит название потери на тр* i^OT^S* « ttroioiy усилию. Величина это* потерн будет
рл = 55,5—50 ** 5,5 1С?.
Величину вотерн на трение можно подсчитать и яри отнесении этой потери к грузу. Б идеальном механизме, затрачивая силу -• ;v-.5 к?» мы подмяли бы груз (?0, равный:
2-55.5—И1 /сг.
Поэтому потеря на трение будет
Q%—Q*» И лг = 2(Р— Р0),
т% е. больше в передаточное число раз. Несмотря на разную величину усилия, затрачиваемого на трение, работа этих сил будет одинакова
Учитывая, что Л— * получим величины работ равными,
пк а должно быть, ибо обе эти потери идут на ■*У же работу трения. Можно также разности Р— Р. м <Д>— V считать силами трения, приведенными соответственно к и н <г
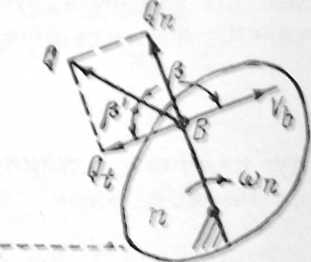
Случай машины с вращательным движением звеньев При-мнительно ж пому случаю обычно закон передачи сил несколько вилоиэиеаиегся и получает форму закона передачи мо иен то а. Будем опять исходить мз условной схемы машины (фиг. 13), аналогичной фиг. И; там как каждое змио имеет
неподвижную ось вращения, начиная с О, и кончая О* , та на
основании закона передачи сил имеем
Займемся преобразованием выражения передаточного числа iУ = !>*. Принимая во внимание, что при вращательном дви-
жени и
Уь = гд
получим
= ^1
1л >
где *1* =——передаточное число между звеном / ил, понимая под передаточным числом уже отношение угловых скоростей. Подставляя это значение ц в выражение для Pt> получим
Qt
ил и
Qtrb
hn т1обш
Из чертежа видим, что Ptra будет моментом силы Pg относительно Ot, а вместе с тем и моментом движущей силы Р относительно оси Ох, так как другая составляющая Рл силы Р момента относительно оси Ох не дает, поэтому Pt гп == М(Р) или Мд.. Точно так же Qtrt=M(Q) или Л1„.с , вместе с тем закон передачи сил переходит в
м» =т^~- (31)
В этой форме он носит название закона передачи моментов. Существенное отличие от закона передачи сил заключается в том, что здесь передаточное число представляет отношение не линейных скоростей, а угловых.
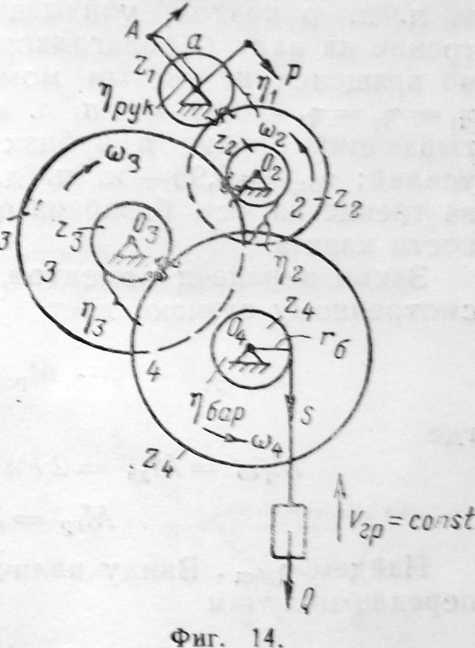
Пример. Положим, имеется ручная лебедка, схематически изображенная на фиг. 14. Здесь вал Ог — рабочий, несущий две рукоятки с плечами а = 40 см% к которым приложены усилия двух рабочих по Я= 25 кг каждое. Валы О, и Оа—промежуточные; вал 04—грузовой; на нем насажен барабан, имеющий радиус reap =20 см. К концу наматываемого на барабан каната • m привешен груз <?. Числа зубцов на шестернях имеют следую щие значения:
2, |
= 12 |
г, = 48 |
г, |
= 36 |
z, = 10 |
|
= 12 |
zt = 60 |
Определить, какой груз можно поднять на данной лебедке, если к. п. д. отдельных передач будут следующими: т)рук = 0,97— к. п. д. рукояток, учитывающий дополнительные потери на трение на валу ох благодаря тому, что он будет приводиться во вращение не чистым моментом, а окружными усилиями р;
== т)2 = tq3 = 0,93 — к. п. д. каждой пары зубчатых колес, учитывающий трение в зубцах и трение на осях от окружных усилий; тг]бар =0,95 — к. п. д. барабана, учитывающий потери на трение на оси барабана от натяжения каната s и от жесткости каната.
Закон передачи моментов, написанный применительно к рассмотренному случаю, дает
Л*Р46=^-, (а)
где
УИраб =Мдв = 2ра = 2-25-40 = 2000 кг-см,
-Мгр = Л/п.с = С^бар .
Найдем у\0бщ ♦ Ввиду наличия в механизме последовательных передач получим
Чобщ =т,Рук гц*)2т,8т,бар =0,97-0,93s-0,94 = 0,73.
Передаточное число Ji_4 найдется по формуле рядового зацепления:
1-4 ^iZ2Z3~ 12.12-ю —1г~
Из формулы (а) найдем
Л1гр «2000-72-0,73=105000 кгсм,
откуда
Л ^гр 105000 -ОСЛ - ое
Q = —^ = —™— = 5250 кг = 5,25 т.
гбар 1К)
Потеря на трение, отнесенная к рукоятке, найдется так. Учитывая, что tl:=s"2^» где Р0 — идеальное движущееся усилие, получим
2Р0 = 2Рт) = 50-0,73 = 36,6 кг. Поэтому потеря на трение, отнесенное к рукояткам, будет
Случай машины с механизмами, имеющими переменные передаточные числа. Простейшими примерами машин с механизмами, имеющими изменяющиеся передаточные числа, являются машины, в состав которых входят шарнирные механизмы, как правило, имеющие соотношение скоростей, изменяющееся от положения к положению.
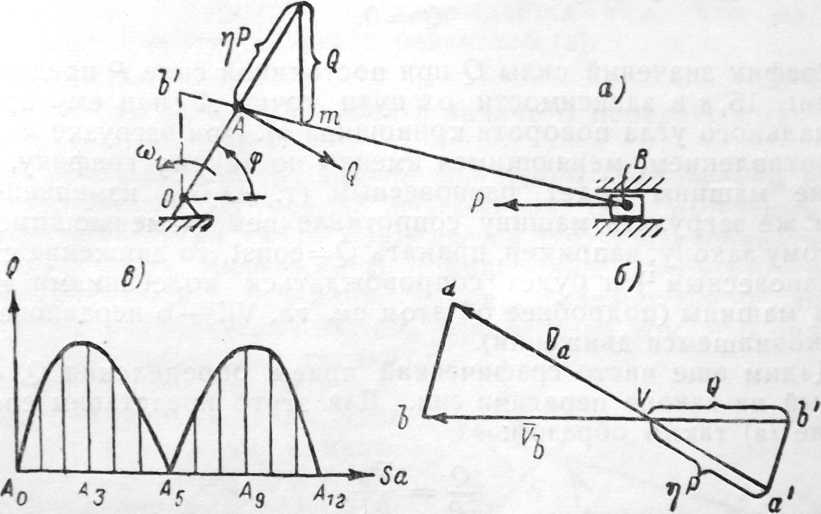
Пример. В кривошипном механизме (фиг. 15, а) задана движушая сила Я, приложенная к ползуну. Найти, какое полезное сопротивление Q, приложенное к точке а и действующее перпендикулярно к кривошипу oa, она может преодолеть при
Фиг. 15.
равновесном движении. Коэфициент полезного действия машины считать заданным.
Принимая во внимание, что в данном случае pt = Р, qt = q и i = iba, так как передача силы происходит от В к Л, на основании закона передачи сил получим
йЩ-
откуда »в1)
Что касается передаточного числа ^в = тт , то оно может быть определено построением плана скоростей; отношение отрезков плана скоростей, соответствующих vk и va и даст искомое т. е.
Итак, окончательно
rid фиг. lo,o построен план скоростей обычным приемом, исходя из произвольно выбранного отрезка Vа. Из плана скоростей видим, что в данном положении передаточное число —
близко к единице. Поэтому сила Q, если учесть к. п. д., получается несколько меньше Р. В точности передаточное число будет равно 1 при <? = 90° и <? == 270°. В этих положениях
Наконец, в мертвых положениях механизма Vb = О, поэтому iba — 0 и для Q получим
График значений силы Q при постоянной силе р представлен на фиг. 15, 5 в зависимости от пути точки а (или ему пропорционального угла поворота кривошипа <р). При загрузке машины сопротивлением, меняющимся именно по такому графику, дви- j жение машины будет равновесным (т. е. без изменения е). Если же загрузить машину сопротивлением, .изменяющимся по другому закону, например, принять Q=const, то движение станет неравновесным 1) и будет сопровождаться колебаниями живой силы машины (подробнее об этом см. гл. VII—о неравновесном установившемся движении).
Дадим еще чисто графический прием определения Q, основанный на законе передачи сил. Для этого представим соотношение (а) таким образом:
откуда видно, что если на сторонах Va и Vь треугольника скоростей построить силовой треугольник со сторонами т,Р и Q, то оба треугольника будут подобны. На этом основан следующий прием графического определения Q по заданным \ и Р. На продолжении отрезка \'а плана скоростей (фиг. 15,6) откладываем отрезок afV=t{P. Из его конца а/ проводим линию, параллельную отрезку ab плана, до пересечения в точке Ь' с продолжением отрезка Vb плана. Отрезок b'V и представит силу Q в масштабе силы Р. Правильность построения подтверждается тем, что из условия подобия babV и На'b'V вытекает равенство (а). Рассмотренный прием использования треугольника скоростей плана для построения силового треугольника является общим приемом, применимым для любого механизма. В отношении же кривошипного механизма принято строить треугольник на схеме самого механизма и не выстраивать для его построения отдельного плава скоростей. На основании первой части курса (гл. IX) известно, что, если продолжить шатун до
*> Для сохранения его установившимся нужно Q принять равным сред-«ежу значению ординаты предыдущего графика пересечения с линией, проведенной через точку о — центра вращения кривошипа— перпендикулярно к линии движения ползуна (при центральном механизме перпендикулярно к линии ов)т то треугольник ob'а на механизме будет подобен babv плана» т. е. будет представлять план скоростей, повернутый на 90* против истинного расположения и в масштабе одного кривошипа. Поэтому треугольник сил Q и т\р> подобный треугольнику скоростей, может быть построен следующим образом (фиг. 15, а). На продолжении кривошипа oa откладываем i\p в виде отрезка an. Из конца п проводим линию пт Ц ъ'о. Отрезок тп и будет представлять величину Q в масштабе р. Правильность построения подтверждается тем, что- из подобия ьоь'а и ьапт вытекает равенство (а).
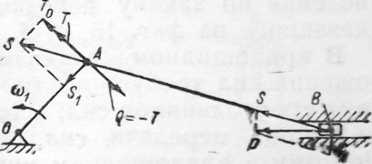
3. Метод разложения сил в задаче о передаче сил
Усилие Q может быть найдено еще одним графическим приемом, основанным на методе разложения сил, известным из графической статики, где он применяется для определения усилий в стержнях ферм. Возможность применения к движущемуся механизму методики определения усилий, разработанной для неподвижных механических систем, основана на том, что силы р и Q, удовлетворяющие закону передачи сил, обеспечивают движение се = const. Поэтому, если они будут приложены к неподвижному механизму, то обеспечат движение с е = 0, т. е. покой машины; другими словами, они будут уравновешиваться на механизме. Разница будет толь- фиг- 16-
ко в коэфициенте полезного
действия. При неподвижном механизме к. п. д. будет обусловливаться силами трения, возникающими в сочленениях только от статических сил в механизме, а на ходу механизма нагрузка сочленений будет обусловливаться еще силами инерции частей, с чем, конечно, приходится считаться при назначении к. п. д. в расчетах или при теоретическом его определении. В нашей же постановке задачи до изучения законов трения в машине мы считаем коэфициент полезного действия заданной величиной.
На фиг. 16 произведено определение Q методом разложения сил. Усилие р в шарнире в разлагаем по закону параллело-грама сил на две составляющих: s— по направлению шатуна и n—по направлению, перпендикулярному к направляющим (или что то же самое — по направлению, перпендикулярному скорости vb). Сила n воспринимается нормальной реакцией параллелей и на движение механизма влияния оказывать не будет. Сила же S по линии действия передается в палец кривошипа а и здесь может быть разложена по направлению» перпендикулярному кривошипу Г0, и по направлению кривошипа St.
т
РАЗДЕЛ ВТОРОЙ
Метод изучения движения машин с учетом действующих сил на основе принципа Даламбера
(кинетостатика)