

Глава IV
ПЕРЕДАЧА СИЛ В МАШИНАХ ПРИ НЕРАВНОВЕСНОМ
ДВИЖЕНИИ
; 1. Введение сил инерции и уравнение движения машины
До сих пор мы в вопросах передачи и приведения сил ограничивались случаем равновесного движения машины, когда ее движение не сопровождалось изменением живой силы. Каков будет закон передачи сил в общем случае движения — неравновесного движения,—и является предметом нашего ближайшего рассмотрения. Большую пользу в выяснении этого общего (динамического) закона передачи сил окажет введение в рассмотрение инерционных сил, которые до сих пор не фигурировали в явном виде в наших рассуждениях; о них лишь было упомянуто в общей классификации сил. Учет сил инерции, кроме того, позволит находить истинные усилия в звеньях механизма и в кинематических парах на ходу машины, в то время как метод разложения сил, произведенный без учета сил инерции, дает правильные результаты только для приведенной и уравновешивающей силы при равновесном движении (так как мы увидим потом, что приведенная сила инерции всего механизма при равновесном движе нии равна нулю), а в отношении усилий в звеньях и парах дает лишь статическую часть усилий, приближающуюся к полным усилиям при достаточно медленном движении машины или при покоящейся машине.
В общем случае движения машины, когда действующие силы не уравновешиваются, уравнение движения машины представится в следующей форме [см. уравнение (6)]
£,-£, = 2^ — 2Ж.с±2Жес — 2^тР,
Примененное для бесконечно малого промежутка времени оно переходит в или, разделив обе части на элемент времени dt и введя понятие
о мгновенной мощности /V = получим
dE_ dt
(46)
Таково уравнение мгновенных мощностей при неуравновеши-вающихся силах: в данном случае мгновенная мощность действующих в машине сил не балансируется между собой; результирующая, или избыточная, мощность идет на изменение живой силы по времени.
Этой формой уравнения движения мы воспользуемся для включения в него в явном виде инерционных сил. Займемся пре-
dE
образованием производной Исходим из определения живой силы
где суммирование распространяется на все материальные точки машины. Произ-
dE
водная
dt
или мгновенное изменение жи-
вой силы по времени, будет -T-2.miVi-dt>
(а)
dV ' -
где ~есть касательное ускорение Wtii-o\\
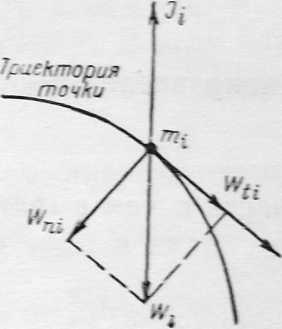
Фиг. 26.
материальной точки машины. Как известно из кинематики, касательное ускорение wn является составляющей полного ускорения w. (фиг. 26)
вместе с тем выражение (а) переходит в
££ = 2тМАи',.С05(1Гг. V.).
на основании второго закона Ньютона, если материальная точка движется с ускорением, то на нее со стороны других материальных точек будет действовать сила р> равная
~R = тй Wi \
Введем в рассмотрение силу, обратную силе Pf, представляющую на основании закона: действие равно противодействию,— то инерционное сопротивление, которое оказывает рассматриваемая материальная точка при сообщении ей ускорения. Эта сила носит название силы инерции.
Так, введенная сила инерции является приложенной не к данной материальной точке, а к материальным точкам, увлекающим рассматриваемую материальную точку с ускорением wlt или, как говорят, является приложенной к связи. В этом смысле данная сила инерции является вполне реальной силой. Однако, по пред* ложению Даламбера, иногда рассматривают силу У„ как приложенную к самой материальной точке, но которую уже считают лишенной массы, с целью свести уравнения движения к уравнениям равновесия. В таком случае сила Jt будет являться условной, фиктивной силой Мы в дальнейшем будем рассматривать силы./,, преимущественно приложенными к связям, поэтому в этих случаях они будут являться реальными силами, действующими в машине, через посредство которых учитывается силовой эффект движущихся масс на связи, принуждающие их к движениям. Во всяком случае к чему бы не считать приложенной силу инерции, численное ее значение будет
а направление противоположно wh поэтому cos(^, уд = — cos (У,, vj-;
dE
вместе с чем выражение для ^- переходит в
Но У,К,cos(7j, vt) есть не что иное, как мгновенная мощность силы инерции; обозначая ее через <VHh, получим
f=-2*n„. (47)
т. е. при учете инерционного действия масс в машине через силы инерции мгновенное изменение жирой силы по времени может быть тождественно заменено суммарной мощностью этих сил, взятых с обратным знаком.
На основании тождества (47)1) уравнение движения машины может быть представлено в форме:
-2Хн =2>лв — 2/V„.c +2>вес -2^тр. (48)
Для того чтобы лучше уяснить себе роль сил инерции при движении машины, рассмотрим два возможных случая движения машины с изменяющейся живой силой.
Движение машины с возрастающей живой силой. В этом случае очевидно dE > 0, а следовательно и — >0; поэтому на основании (47) 2 Мм будет меньше нуля. Это показывает, что при таком движении в малине будут преобладать силы инерции, направленные против скоростей их точек приложения или составляющие со скоростями тупые углы и, следовательно совершающие отрицательную работу. Обозначим эту суммарную отрицательную мощность сил инерции через — \y>nm I вместе с чем уравнение движения (48) перепишется так:
или
12Жн | = 2л^дв -2Жс ±2Жс -2^тр,
(49)
Полученное выражение представляет закон передачи мгновенных мощностей при движении машины с возрастающей живой силой. Согласно этому уравнению мощность движущих сил затрачивается не только на преодоление полезных и вредных сопротивлений и сил веса звеньев, если центр тяжести звеньев поднимается, но также и на преодоление инерционных сил. Силы инерции в данном случае по своему суммарному эффекту играют роль добавочных (инерционных) сопротивлений в машине.
Движение машины с убывающей живой силой. В этом слу-
ue
чае de < 0 и, следовательно, — < 0, поэтому согласно тождеству (47) должны иметь 2мин > 0.
Обозначим эту суммарную мощность сил инерции через
12 nnh |.
Уравнение движения (48) перепишется при этом в виде:
-12м« |=2^дв -2%, ±2^вес — Цлгтр,
или, решая это уравнение относительно мощности движущих сил и мощности сил инерции, получим
2^дв -И2ли |=2iv,c ±2Жс +2wTp, (бо>
т. е. при движении машины с убывающей живой силой на мощность сил полезных и вредных сопротивлений и на мощность весов звеньев, при движении звеньев с подъемом центра тяжести затрачивается не только мошность движущих сил, но и мощность сил инерции. Силы инерции в машине в данном случае играют роль добавочных (инерционных) движущих сил, облегчающих работу основного двигателя машины. Можно представить себе и такой случай, что основные движущие силы в машине будут устранены (отключен мотор, приводящий в движение машину-орудие, прекращен доступ пара в цилиндр парового двигателя и т. д.); однако машина будет продолжать некоторое время работать, и ее работа в этом случае будет происходить именно за C4tT движущих сил инерции, пока не иссяк ет вся ее живая сила.
Объединяя эти два случая движения машины с изменяющейся живой силой, можно уравнение движения написать в следующей форме:
^дв Щ ± |2^ин | + 2Мьс ± 2>.ес +2Wxp , (51)
55
причем знак плюс при мощности сил инерции будет относиться к случаю движения с возрастающей живой силой, а знак минус— с убывающей. Сравнивая это уравнение с уравнением мощностей, выведенным для случая движения без изменения живой еядн,
видим, что принципиальной разницы в них нет: лишь в правей части наряду с мощностями задаваемых (активных) сил фигурируют мощности сил инерции. В этом и заключается так называемый! принцип Даламбера, гласящий, что присоединен-
движущихся дящуюся в силой; други! позволяет фо Если иы |
ошлм на материальную систему, сил инерции ее : позволяет всю систему рассматривать как яахо-ювесии или движущуюся с постоянной живо! ловами, включение и рассмотрение сил инерции (ьно задачу динамики сводить к задаче статики.
уравнения мощностей, не закякь i нови л и закон передачи сил ины равновесного двяжезая, стей (51), получим дизама-демический закон пепелачи
сходя из у
в сеое силы инерции, ус для частного случая движения ма теперь, исходя из уравнения мощ| ческий закон передачи сил и
2. Закон передачи сил и моментов при неравновесном движении (динамический закон передачи сил и моментов)
Для его вывода установим прежде всего обобщенное понятие о к. о. д. машины при неравновесном движении машины и ери
* а и
учете сил собственного веса звеньев. Рассмотрим сначала случай движения машины, когда в данный момент — 2 -"w < - -
т. е. когда силы инерции вместе с весами звеньев по суммарному своему действию являются в машине сопротивлениями. В этом случае к. п. д. машины назовем отношение
(52)
В случае же движения, когда в данзый момент У ДW — -f*2Wf*< >0, т. е., когда силы инерции вместе с силами веса звеньев по суммарному своему действию являются в машине движущими факторами, к. п. д. назовем отношение
^— ~7,—Т iv к—ГуТ,—г» 1ЗД
т. е. в обоих случаях к. п. д. определяем как отношение мощности фактора сопротивления (за исключением трення) к мощности движущего фактора.
Решая уравненнл (52) и (53) относительно мощности движущих сил, подучим для обоих случаев
i^=i(/Va.c + -f 2М»ес I), (54)
где*3885 1 «ри 2iV- + 2^i« <0 н * = — т) при +
:>/) и (53), на основании ▼/ как отношения
л4дии /кддв
при2^«н + 2^вес > 0. Значок нуль здесь обозначает идеальный движущий фактор и фактор идеального полезного сопротивления Как видим, мы приходим к выражениям для к. п. д., установленным ранее для частных случаев движения машины. В этом и заключается ценность введенного обобщенного понятия о к. п. д. при неравновесном движении машины.
3. Практические приемы определения динамических движущих сил и полезных сопротивлений, а также и их моментов
Практические приемы определения сил Рдии или Q*™ в стержневых механизмах остаются те же, что и рассмотренные выше для сил Р и Q — способ непосредственного разложения и способ проф. Жуковского, основанный на применении плана скоростей, нужно только в число действующих сил ввести силы инерции Однако чтобы не иметь дело с бесчисленным множеством сил инерции, связанных с каждым отдельным звеном машины и равных Jl=z—ml W( (где /^—элементарная масса звена), эти силы должны быть предварительно объединены в равнодействующие или эквивалентные системы сил и пар, сводящиеся в каждом отдельном звене к немногим силам или парам. Как находятся эти равнодействующие силы инерции, подробно будет выяснено в гл. V. В примере же разбираемом ниже силы инерции определены исходя из условия, что их работа численно равна изменению живой силы, а мощность — производной живой силы по времени с обратным знаком.
Для случая машины с механизмом, имеющим постоянное передаточное число и вращающимися звеньями, силы Рлш и 0ми и их моменты УИДГ и Ж„ис могут быть определены одним вычислением без всяких графических построений.
Пример. Пусть требуется определить пусковой момент на якоре мотора электрической лебедки, изображенной на фиг. 27, для сообщения поднимаемому грузу скорости 1/гр в течение t{ секунд. Заданными будем считать в с груза Q, моменты инерции всех вращающихся масс, числа з>бьев на шестернях, к. п. д. отдельны* элементов лебедки и радиус барабана Гбар•
Иск* мый пусковой момент якоря электромотора можно рас** сматривать как динамический движущий момент якоря:
Допуск = м*™.
о к. п. д., устанавливаемые ур-ниями с ур-ния (55) совпадают с определением
ОДИН Г) л им При 2Л/„„ + 2iVBec <0
и как отношения
дДИИ фДИй
г\ =--—- И Ti -
1 /^дин /v&hh " '
Моментом полезного сопротивления здесь будет грузовой момент
мг0 = Жп.с = qr6ap.
Искомый пусковой момент найдем из динамического закона передачи моментов [ур-ние (56)]. Чтобы его написать, учтем, что моменты сил веса деталей лебедки будут равны нулю—все части вращаются около своих центров тяжести, поэтому динамический закон передачи моментов напишется так:
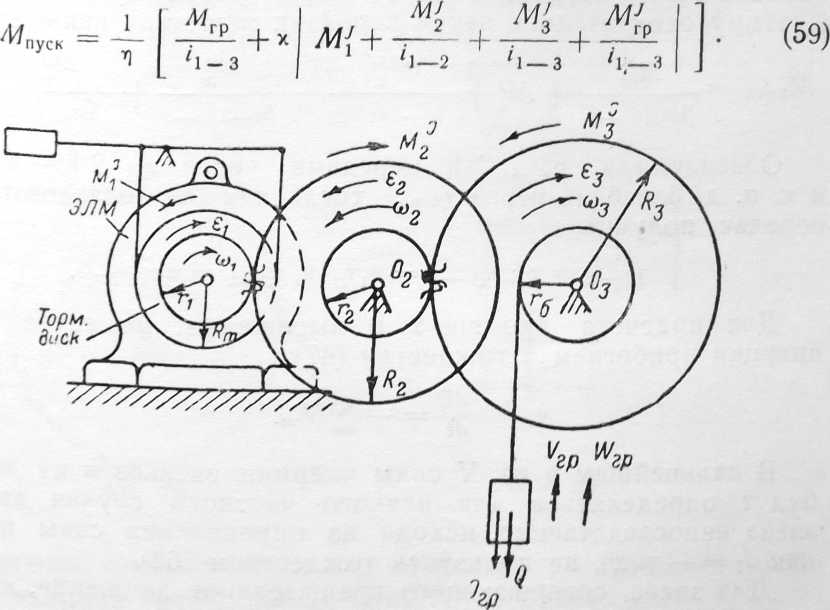
Фиг. 27.
Здесь mj{ представляет моменты сил инерции от отдельных масс, связанных с валами О,, 02 и os; м{р — момент на грузовом валу от сил инерции груза.
Так как в данном случае мы имеем дело с механизмом, имеющим постоянное передаточное число, то в пусковой период лебедки, когда будет расти живая сила всей системы, движение всех частей буд-т у коренным, а поэтому все инерционные моменты будут направлены против угловых скоростей соответствующих звеньев,т. е. будут являться в машине сопротивлениями и должны быть введены под знак суммы со знаком минус; однако благодаря абсолютному значению этой суммы они могут быть введены, как это и сделано в выражении закона моментов, со знаком плюс. Множитель * в данном случае следует считать равным 1 (так как 2Ж» < 0).
Вместо того, чтобы в данном случае оценивать потери на трение обшим к. п. д., здесь раци нально оценить эти потери через частные к. п. д., учитывая, чго не все инерционные моменты преодолеваются двигателем через все передачи Так момент mjv связанный с моментом сил инерции 1-го звена, преодолевается моментом якоря электромотора непосредственно, без участия передачи; поэтому преодоление этого момента не будет связано с потерями на трение. Преодоление момента mj2 будет уже связано с преодолением потерь на трение в одной передаче, которые учтем через к. п. д. 2; с преодолением mj2 связаны потери в двух передачах, что учтем через к. п. д. та_3 и, наконец, с преодолением mjt? связаны потери во всем механизме, включая барабан и трос, которые учтем через к. п. д. т|обш . Поэтому окончательно закон передачи моментов напишется так:
м м* м{ MJ
Л*„у„ =—-а— + м>+ 4-1—7- -+ „ 7 ' <60>
%бщ h—3 ^1—2*1-2 41—3*1—3 Чобщ М-3
Обозначим к. п. д, 1-й передачи через т)1} 2-й—через и к. п. д. барабана через т]бар, тогда^как для последовательных передач, получим
7)! _о = %; т)1 —3 — ъъ и Т)общ = %Т)^бар , (61)
Для подсчета входящих в выражение моментов от сил инерции прибегнем к тождеству (47):
§--2М,,,. (62)
В дальнейшем в гл. V силы инерции звеньев и их моменты будут определяться для всякого частного случая движения звена непосредственно, исходя из определения силы инерции, какЛ = — мод не пользуясь тождеством (62).
Для звена, совершающего вращательное движение, имеем
Я-ТГ. (63)
где /—момент инерции звена относительно оси вращения. Пользуясь ур-нием (63), составим выражение для^:
dE , d<& г
На основании ур-ния (62) получим
nhh = —/аш. (64)
Множитель при ш имеет размерность момента и представляет момент сил инерции, развивающихся при неравномерном вращении звена — это и будет искомый момент mj. Итак,
mj = /е. (65)
Отрицательный знак мощности в выражении (64) означает, что момент mj направлен против угловой скорости или против углового ускорения, которое при ускоренном движении направлено по угловой скорости (фиг. 2д). Полученное направление м0иента Л1'соответствует установленному ранее результату, что при ускоренном движении силы инерции являются сопротивлениями.
Обозначим моменты инерции зубчатых колес с радиусами
rltr%tr% и /?8 соответственно через />,, /Га, //?, и i#v момент инерции тормоза через /Т0Рм, момент инерции барабана — Дар и момент инерции якоря электромотора через /як. Тогда на основании ур-ния (65) будем иметь
м{ = /jSj = (/Як + W« + ht ) tlf I
Afi -'Л e (A.+ /!?,)••. (66>
^ = ЛеЗ = (^з+/бар)83.
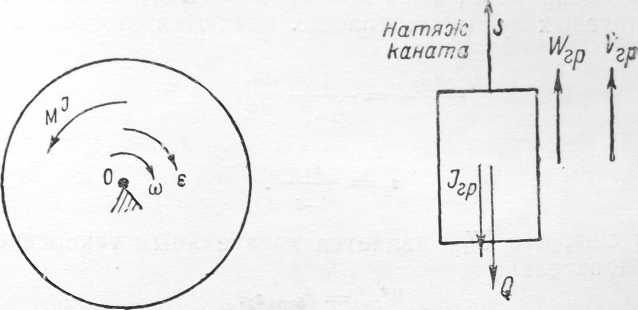
Фиг. 28. Фиг. 29.
Аналогично вычисляется и —момент на грузовом валу от силы инерции груза. Живая сила груза будет
£гр=^К- (67)
Мощность силы инерции груза где
ЛР = -J Wrp (68)
сила инерции груза, направленная против ускорения wrp (фиг. 29).
Следовательно, момент от силы инерции груза на грузовом валу будет
Инерционные моменты м\ и сила инерции груза нанесены на хеме механизма (фиг. 27). Принимая во внимание полученные выражения для моментов сил инерции, закон передачи момек<
тов (60) перепишется так:
Urn Л 3 1l_a «1—3 1l_3 *!-»
0 wt?
g %вш '1 I
Пользуясь соотношением, что
(70)
(71)
где *i_i —передаточное число между валами 1 и t, и диферен-
цируя его по времени, имея при этом в виду, что передяточные числа в круглых зубчатых колесах остаются постоянными, получим
dfo>j I flfoij
или
***-Т*Т.- (72)
Учтем еще, что Wt? является касательным ускорением барабана, следовательно
wrp =Гбар в8. (73)
Вместе с (71), (72) и (73) ур-ние (70) перейдет в
м — Qr<Sap I с
'"пуск — -1 г е1
1—3 'общ
1 -2 '1-2
Or*
_i_ /а i б«Р
^1-3 \бЩ
(74)
Выражение в квадратных скобках имеет размерность момента инерции и носит название приведенного к валу мотора момента инерции всей системы и обозначается через
/прив •
м ml '
/прив jj*LJL - , _Js--1 _Qr* _ . (75)
1-2 '1—2 1—3 .1—3 6 1—3 '
i) Коэфициенты полезного действия, входящие в ур-ние (75), покалывают, что преодоление инерционных сопротивлений неизбежно связано с преодоле* нием дополнительных вредных сопротивлений, являющихся как бы их следствием.
Это вполне понятно» так как сопротивления, о которых здесь идет речь, пропорциональны нормальным давлениям, возникающим в кинематических парах (зубчатых колесах, подшипниках), а эти давления увеличиваются от действия касательных сил инерции.
Вместе с тем при учете суммарного динамического эффекта по уравнению живых сил мы.получаем другое выражение для приведенного момента инерции (приведенной массы), так как потери учитывались в этом случае через общий к. п. д., при вычислении избыточных работ [уравнение (221)].
а<0
Выражение Q/y>..,> /'i -э*)обш называется грузовым моментом, приведенным к валу мотора и может быть обозначено через
Наконец, «^"Д представляет суммарный инерционный момент, приведенный к валу двигателя
а1пн = в,/прив /77\
ivl\ вал 1у 1 вал ('')
Вместе с обозначениями (75), (76) и (77) ур-ние (74) переходит в
Л/пуск =М\\гл +М?шшал (78)
При установившемся равномерном движении е = 0 и пусковой динамический момент мотора переходит в статический
Вместе с чем коэфициент перегрузки двигателя будет
£ а '"пуск _ | , 1вал (80)
Кг Qr6aV
11—3 ^обш
Величина углового ускорения %, по данным задания, находится так: из ур-ния (74) мы видим, что при постоянном Жпуск (его постоянство практически осуществляется регулированием пускового реостата) угловое ускорение еа остается постоянным, поэтому движение лебедки будет равноускоренным, и заданное время разбега определит угловое ускорение барабана:
а вместе с тем угловое ускорение ех вала электромотора найдется из
•■—<->-w (82>
Данные для численного подсчета: q = 1 m,vrp = 18 м\мин, радиус барабана гбар = 10 см, число оборотов электромотора л = 945 об/мин. Коэфициент полезного действия каждой пары зубчатых колес *ь = ^ = 0,92, к. п. д. барабана t)6ap = 0,95.
Таким образом, противоречие здесь только кажущееся. Практически можно рексмендовать пользоваться ур-нием (75) в задачах типа рассмотренных гл. IV настоящею курса, а ур-ние (221) правильно использовать в задачах, подобных расчету веса махового колеса по заданной неравномерности.
Как ясно из самих уравнений, использование ур-ния (221) в первом случае д »ет инерционный момент несколько пониженного значения против полученного выше по ур-нию (75).
Это вполне допустимо в тех случаях, когда нет необходимости учитывать потери достаточно точно.
Дополнительные данные для динамического расчета: период разбега tx~2 сек, маховой момент якоря электромотора Gw&* = 0,785 кгяг, момент инерции тормозного диска /го^т = 0,75* но* менты инерции зубчатых колес /, === 0,5, lr% = 1, /*, = 50, /** = 100; то же для барабана UjK =30 (все моменты инерции указаны'
Указание. Достаточность указанного на схеме (фиг. 27) числа зубчатых пар проверить расчетом. Произвести подразделение общего передаточного числа на части, руководствуясь на счет этого общими правилами.
Маховым моментом вращающегося ротора называется произведение его веса на квадрат диаметра инерции, и, так как момент инерции того же ротора равен произведению массы ротора на квадрат радиуса инерции, то
г_С/р2_gd2
Задача. Для случая лебедки предыдущего примера определить необходимое тормозное усилие Qtopm на окружности тормозного диска с диаметром 400 мм дли обеспечения равномерного спуска груза и для остановки груза, спускающегося со скоростью 17гр = 15 м/ман в течение t2 = 1,5 сек.