

3.2. Порядок выполнения работы
1. Соберите схему имитационного моделирования в соответствии с рис. 3.3.
 Рис.
3.3. Схема имитационного моделирования
Рис.
3.3. Схема имитационного моделирования
2. Задайте значения постоянных времени T1 и T2.
3. Выберите способ получения числовых координат Д-кривой и получите 6–7 значений. Рекомендуется фиксировать коэффициент передачи k и перебирать значения постоянной времени T.
Если для определения Д-границы используются логарифмические характеристики, то при моделировании систему на рис. 3.3 необходимо разомкнуть.
4. При
![]() и
и
![]() для одной точки в каждой из областей
D(3,0) и D(1,2)
получите для замкнутой системы
переходные процессы и для разомкнутой
– логарифмические характеристики.
Определите показатели качества и запасы
устойчивости для области D(3,0).
для одной точки в каждой из областей
D(3,0) и D(1,2)
получите для замкнутой системы
переходные процессы и для разомкнутой
– логарифмические характеристики.
Определите показатели качества и запасы
устойчивости для области D(3,0).
5. Задайте значения параметров для областей D1(2,1) и D2(2,1), получите для замкнутой системы кривые переходных процессов, сравните и сделайте выводы об их характере.
6. Проведите анализ полученной информации и сделайте вывод о степени влияния коэффициента передачи k и постоянной времени T на устойчивость системы.
3.3. Контрольные вопросы
1. Что характеризует устойчивость и ее математическая формулировка?
2. Что представляют собой характеристические полиномы разомкнутой и замкнутой систем?
3. Как формулируется основная теорема устойчивости?
4. Какие виды могут иметь переходные процессы, если все корни будут в левой полуплоскости?
5. Почему попадание одного корня в правую полуплоскость приводит к расходящимся процессам?
6. В чем основная суть метода Д-разбиения?
7. Почему
при построении Д-кривой
необходимо изменять частоту от –![]() до +
?
до +
?
8. В чем отличие Д-кривой от особой прямой?
9) Почему применяется одинарная и двойная штриховка?
10. Почему k = –1 является уравнением особой прямой?
11. Почему Т = 0 соответствует особой прямой?
12. Как изменятся особые прямые, если одно из звеньев на рис. 3.3 будет являться интегрирующим?
13. Что называется областью устойчивости? Покажите ее на рис. 3.2.
14. Покажите для каждой из областей, приведенных на рис. 3.2, расположение корней на комплексной плоскости s.
15. Что изменится в уравнении (3.20), если в качестве параметров А и В выбрать постоянные времени T и Т1?
Лабораторная работа 4 точность систем и методы ее повышения
Цель работы: изучение способов оценки точности, определения установившихся статических и динамических ошибок, свойств статических и астатических систем, основных методов повышения точности процессов управления в линейных системах.
4.1. Основные сведения
Точность
– это одно из важнейших свойств устойчивых
систем, она оценивается в установившемся
режиме (в переходных процессах ошибка
существует всегда). Если на вход подается
входное воздействие
![]() ,
а на выходе наблюдается переменная
y(t),
то ошибка определяется их разностью:
,
а на выходе наблюдается переменная
y(t),
то ошибка определяется их разностью:
![]() . (4.1)
. (4.1)
Установившаяся ошибка во временной области описывается следующим выражением:
![]() , (4.2)
, (4.2)
в комплексной области –
![]() . (4.3)
. (4.3)
Вводится понятие передаточной функции замкнутой системы по ошибке
 , (4.4)
, (4.4)
для которой существуют следующие формулы:
![]() ; (4.5)
; (4.5)
 ; (4.6)
; (4.6)
 . (4.7)
. (4.7)
Из формулы (4.4) следует, что
![]() , (4.8)
, (4.8)
или с учетом выражения (4.6) при получим:
 . (4.9)
. (4.9)
Простейший
анализ формулы (4.9) показывает, что для
идеальной системы, когда будет
отсутствовать ошибка, необходимо, чтобы
во всем диапазоне частот АФХ разомкнутой
системы
![]() .
В реальных условиях это обеспечить с
помощью обычных устройств не возможно
(существует специальный раздел теории
управления, посвященный реализации
бесконечно больших коэффициентов
передачи). В классе линейных систем
требование
.
В реальных условиях это обеспечить с
помощью обычных устройств не возможно
(существует специальный раздел теории
управления, посвященный реализации
бесконечно больших коэффициентов
передачи). В классе линейных систем
требование
![]() можно выполнить при
можно выполнить при
![]() ,
если в состав системы ввести интегрирующие
звенья.
,
если в состав системы ввести интегрирующие
звенья.
Рассмотрим
эту проблему более подробно. Вначале
допустим, что в системе отсутствуют
интегрирующие звенья и при
![]()
![]() , (4.10)
, (4.10)
где k – коэффициент передачи разомкнутой системы.
Установившаяся ошибка на основании формул (4.3), (4.6) и (4.8) определяется выражением:
 . (4.11)
. (4.11)
Аналитические и экспериментальные исследования точности обычно проводятся при типовых входных воздействиях.
Простейшей
является функция единичного скачка
![]() ,
для которого изображение
,
для которого изображение
![]() .
.
В этом случае говорят об установившейся ошибке по положению
 (4.12)
(4.12)
или с учетом формулы (4.10) –
 . (4.13)
. (4.13)
Значение установившейся ошибки называют статизмом системы:
 . (4.14)
. (4.14)
При
линейно нарастающем входном сигнале
x(t)
= t постоянной будет
его скорость, т.е.
![]() ,
поэтому в установившемся режиме оценивают
ошибку по скорости
,
поэтому в установившемся режиме оценивают
ошибку по скорости
![]() .
В этом случае
.
В этом случае
![]() и из формулы (4.11) следует, что
и из формулы (4.11) следует, что
![]() .
Процессы управления и соответствующие
ошибки при различных входных сигналах
приведены на рис. 4.1.
.
Процессы управления и соответствующие
ошибки при различных входных сигналах
приведены на рис. 4.1.
В
соответствии с рис. 4.1, б ошибка
![]() неограниченно возрастет, но это не
означает, что система становится
неустойчивой. В установившемся режиме
выходная переменная определяется
выражением:
неограниченно возрастет, но это не
означает, что система становится
неустойчивой. В установившемся режиме
выходная переменная определяется
выражением:
![]() , (4.15)
, (4.15)
т. е. отслеживается линейный сигнал
x(t) =
t, но скорость
![]() (система отрабатывает скорость с
ошибкой
(система отрабатывает скорость с
ошибкой
![]() )
и y(t)
оказывается меньше x(t).
)
и y(t)
оказывается меньше x(t).
 а
б
Рис.
4.1. Виды переходных процессов и ошибок
а
б
Рис.
4.1. Виды переходных процессов и ошибок
Теперь допустим, что в состав системы входит одно интегрирующее звено, тогда передаточная функция будет иметь вид:
 (4.16)
(4.16)
и должно при s=0
выполняться условие, что
![]()
![]()
В этом случае можно показать, что
![]() ,
а ошибка по скорости
,
а ошибка по скорости
![]() (4.17)
(4.17)
При
![]() во входном воздействии постоянной
является скорость
во входном воздействии постоянной
является скорость
![]() ,
поэтому оценивают ошибку по ускорению,
которая для системы (4.16) бесконечно
возрастает, т. е.
,
поэтому оценивают ошибку по ускорению,
которая для системы (4.16) бесконечно
возрастает, т. е.
![]() .
Процессы управления и ошибки для системы
(4.16) приведены на рис. 4.2. В этом случае
система также сохраняет устойчивость
и появление ошибки связано с тем, что
ускорение выходной переменной y(t)
меньше, чем у входного воздействия.
.
Процессы управления и ошибки для системы
(4.16) приведены на рис. 4.2. В этом случае
система также сохраняет устойчивость
и появление ошибки связано с тем, что
ускорение выходной переменной y(t)
меньше, чем у входного воздействия.
Системы,
у которых ошибка по положению равна
нулю, называют астатическими и порядок
астатизма определяется числом
интегрирующих звеньев. Тогда статическими
являются системы с ошибкой по положению
![]() ,
определяемой по формуле статизма (4.14).
,
определяемой по формуле статизма (4.14).
При синтезе систем формулы (4.14) и (4.17) используют для выбора значения коэффициента передачи, обеспечивающего выполнение заданной точности.
 а
б
Рис. 4.2. Виды переходных процессов
и ошибок
а
б
Рис. 4.2. Виды переходных процессов
и ошибок
Основные методы повышения точности, как правило, увеличивают порядок астатизма. При этом стремятся, чтобы устойчивость исходной системы W0(s) не изменялась бы при введении дополнительных устройств Wk(s).
Порядок астатизма можно увеличить либо путем непосредственного введения интегрирующего звена в цепь системы, как это делается в прямых методах, либо косвенно, используя, например, свойства глубокой отрицательной или положительной обратных связей.
В методе Боднера параллельно интегрирующему
звену включается усилительное, поэтому
передаточная функция
![]() имеет
вид:
имеет
вид:
 . (4.18)
. (4.18)
В теории управления такое дополнительное или корректирующее устройство более известно как пропорционально-интегрирующий регулятор или ПИ-регулятор и формула (4.18) записывается следующим образом:
 , (4.19)
, (4.19)
где для коэффициента
![]() выполняется
выполняется
![]() . (4.20)
. (4.20)
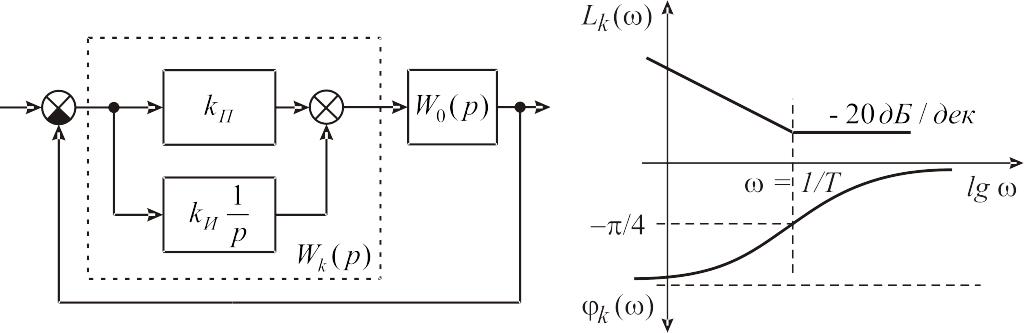
Структурная схема системы, реализующей метод (ПИ-регулятор) приведена на рис. 4.3, а.
После несложных преобразований получим формулу для Wk(s) в виде
![]() , (4.21)
, (4.21)
где
![]() .
.
Устройство
Wk(s)
является изодромным звеном (формула
(2.58), логарифмические характеристики
которого приведены на рис. 4.3, б.
Постоянная времени выбирается из условия
TИ
> Tmax,
где Tmax
– максимальная постоянная времени
W0(s) ,
так, чтобы запас устойчивости по фазе
скорректированной системы
![]() был бы близок к исходной
был бы близок к исходной
![]() и сохранились бы требования к устойчивости
системы.
и сохранились бы требования к устойчивости
системы.
 а
б
Рис. 4.3. Реализация метода Боднера
(ПИ-регулятора)
а
б
Рис. 4.3. Реализация метода Боднера
(ПИ-регулятора)
Рассмотрим косвенные способы повышения точности, основанные на свойствах обратных связей (ОС).
Структурная схема системы с отрицательной ОС приведена на рис. 4.4.
Звено реального дифференцирования Wос(s) включено в обратную связь и для корректирующего устройства Wk(s) с отрицательной ОС можно записать:
 . (4.22)
. (4.22)

Рис. 4.4. Структурная схема системы с глубокой отрицательной ОС
При
![]() ,
т.е. при глубокой ОС будет выполняться:
,
т.е. при глубокой ОС будет выполняться:
 . (4.23)
. (4.23)
Формула (4.23) с учетом выражения (4.20) будет являться передаточной функцией ПИ-регулятора (4.21).
Структурная схема системы, использующей свойства положительной ОС, показана на рис. 4.5.

Рис. 4.5. Структурная схема системы с положительной ОС
Используя правила структурных преобразований при положительной ОС, запишем ПФ для Wk(s) в виде:
![]() . (4.24)
. (4.24)
При
выборе коэффициента
![]() получим выражение
получим выражение
![]() , (4.25)
, (4.25)
которое совпадает с формулой ПИ-регулятора (4.21), если выполняется условие:
![]() или
или
![]() . (4.26)
. (4.26)
Следует
отметить, что при использовании
отрицательной обратной связи ПИ-регулятор
реализуется при любых
![]() ,
а в случае положительной ОС требуется
точное выполнение формулы (4.26).
,
а в случае положительной ОС требуется
точное выполнение формулы (4.26).
В лабораторной работе в исходной системе исследуется объект управления с ПФ вида:
 . (4.27)
. (4.27)