

Список литературы
1. Лисицкий Д. Л. - «Декомпозиция задачи управления движением мобильного робота по пересеченной местности» [Текст] - 2011г.
2.Системы навигации мобильного робота [Текст] – 2008 г.
3.Управление мобильным роботом [Текст + изображения] – 2009г.
Приложения
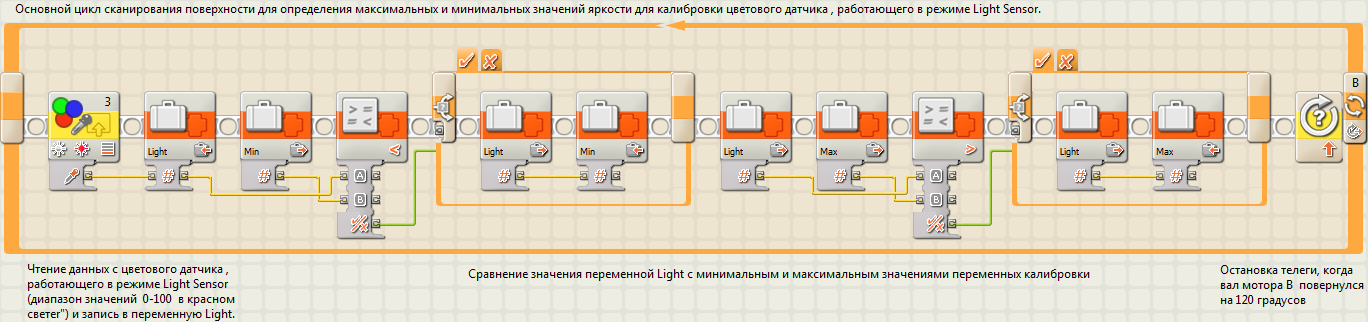
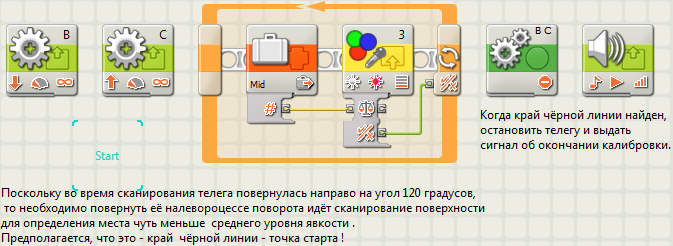
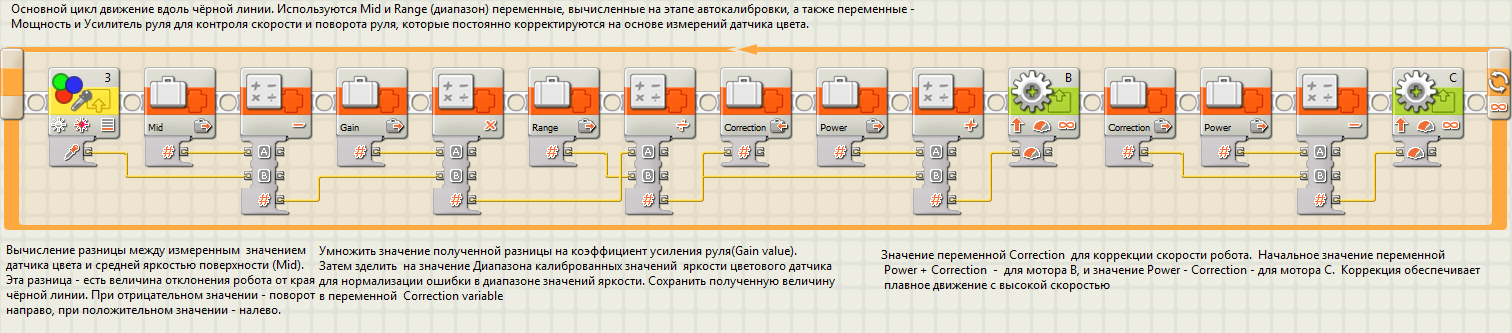
Приложение 1 – Алгоритм управления по криволинейной траектории с коррекцией ошибок
Приложение 2 – Алгоритм управления для объезда препятствий

Рис. 1. Мобильный робот с двумя сервомоторами
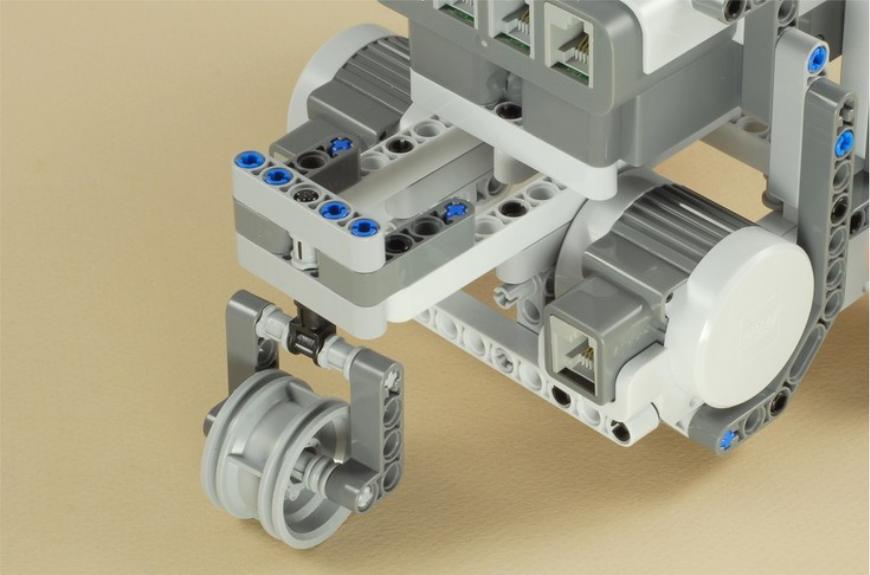
Рис.2 Конструкция поворотного колеса


Р ис.
3. Датчик касания NXT Рис. 5. Цветовой
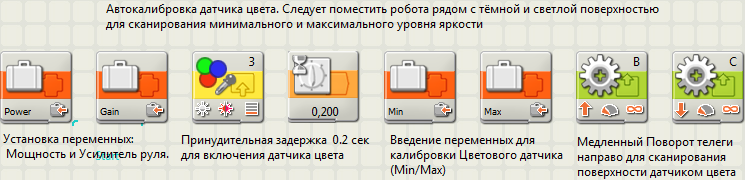
сенсор NXT
ис.
3. Датчик касания NXT Рис. 5. Цветовой
сенсор NXT

Рис. 4. Ультразвуковой датчик расстояния
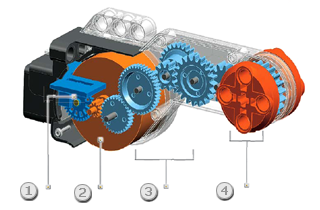
1 - Тахометр датчика вращения.
2 - Электромотор.
3 - Встроенный редуктор
(передаточное число
 )
)
4 - Ступица колеса с отверстием под ось
Рис. 6. Сервомотор с тахометром


Рис. 7. Компас-датчик NXT Рис. 8. Датчик измерения угла NXT

Рис.9 Базовая модель робота с датчиками
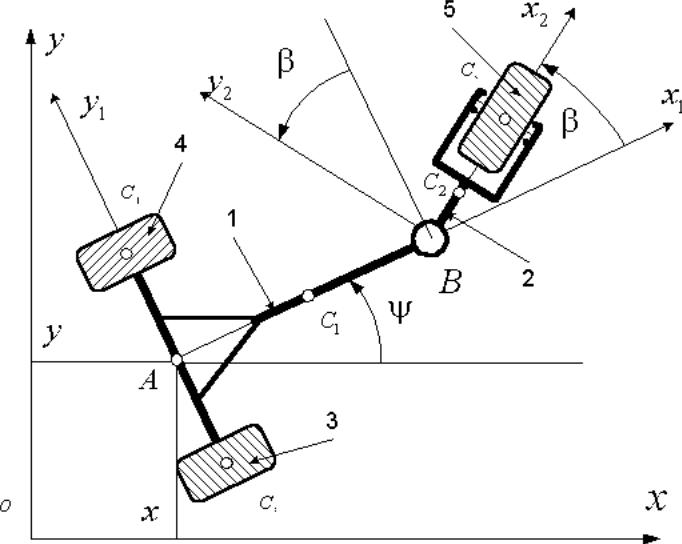
Рис.10 Кинематическая схема с двумя сервомоторами
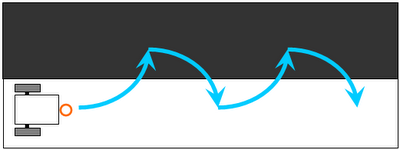
Рис.12 Зигзагообразный стиль движения
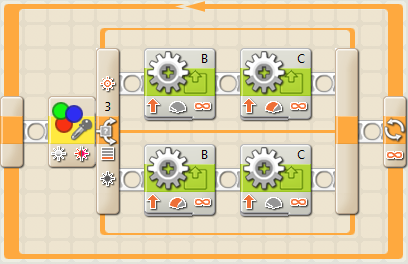
Рис.11 Базовый Алгоритм 1
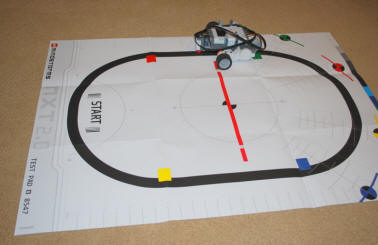
Рис.10 Овальный маршрут

Рис.13 Усложнённый маршрут
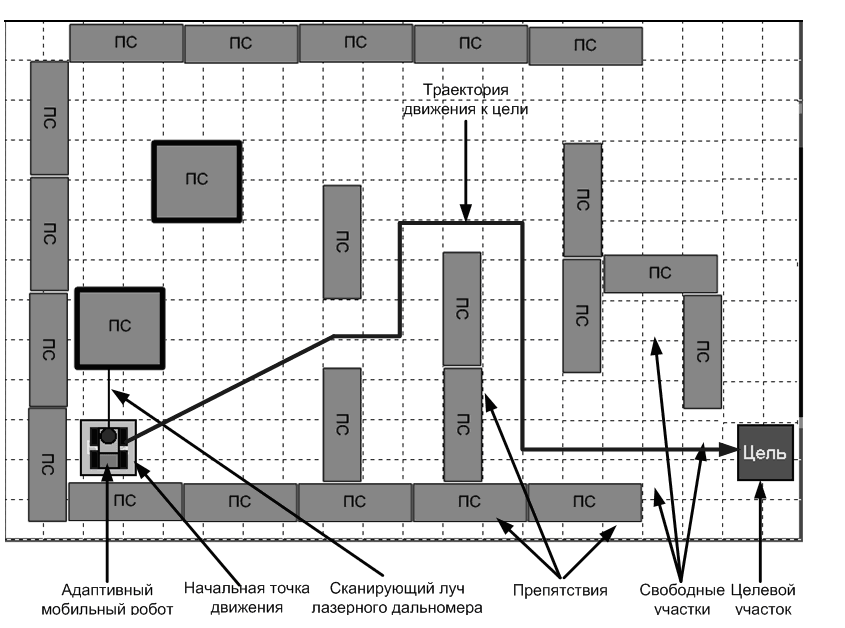
Рис.14 Маршрут объезда препятствий
Приложение 1

Приложение 2
