

Алгоритмы управления по заданной траектории
Под программным движением будем понимать движение, при котором робот движется по заданной кривой с заданной скоростью.
Постановка задачи навигации робота по заданной траектории
Для определения заданной траектории было решено использовать два метода.
Определение нескольких контрольных точек траектории в полярной системе координат (угол и расстояние)
Формирование заданной траектории в виде замкнутой кривой линии одного цвета.
Оба метода формирования программной траектории относятся к линейной навигация, т.е. навигации по установленным ориентирам с помощью сенсоров робота. Первый способ навигации робота востребован на большом и открытом пространстве и требует непрерывного определения текущих координат робота. Второй – наоборот, в закрытых помещениях (например, склад готовой продукции).
Формирование траектории по контрольным точкам
Следует отметить, что использование ультразвуковых дачников для определения координат двигающегося робота малоэффективно, поскольку ультразвуковые датчики характеризуются большим временем отклика и ошибками измерений, что не позволяет роботу перемещаться быстро и точно достигать контрольных точек.
Для формирования алгоритма управления роботом по контрольным точкам был использован широко известный метод определения координат движущегося тела на основе показаний тахометров – метод одометрии.
 График
1
График
1
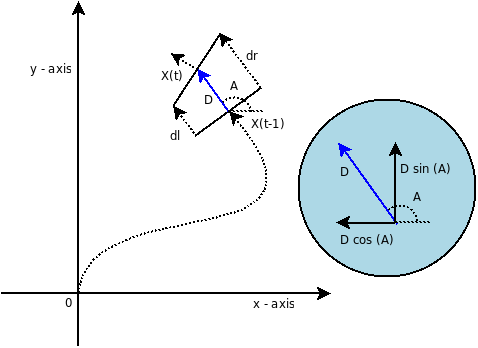
Координаты робота (X,Y) в выбранный момент времени могут быть определены по формуле (График 1):
Условно
принимая промежуток времени
 относительно малым, из трапеции на Рис.
6 определим расстояние , проходимое
центром тяжести робота D
через расстояния
относительно малым, из трапеции на Рис.
6 определим расстояние , проходимое
центром тяжести робота D
через расстояния
 и
и
 ,
пройденные левым и правым колесом
соответственно:
,
пройденные левым и правым колесом
соответственно:

Выражая
расстояния через угловые скорости
правого
 и левого
и левого
 колёс, радиус и передаточное число
редуктора G
и радиус колеса R,
получаем:
колёс, радиус и передаточное число
редуктора G
и радиус колеса R,
получаем:

Заменяя
угловые скорости на показания тахометров
 и
и
 в единицу времени, получаем:
в единицу времени, получаем:

где
 - диаметр колеса робота
- диаметр колеса робота
Поворот вокруг собственной оси робота определим по формуле :

где
 – расстояние между колёс робота
– расстояние между колёс робота
С учётом полученных формул изменения координат определим по формулам:


Выводы по результатам исследований
Разработанный на основе приведённых формул алгоритм управления на основе показаний тахометров показал хорошую кратковременную точность, но неизбежную тенденцию к накоплению ошибок со временем – ошибки увеличивается пропорционально пути, пройденному роботом (График 2). Эксперименты показали , что накапливаемые ошибки ориентации робота являются причиной неточности отслеживания траекторий, заданных контрольными точками.
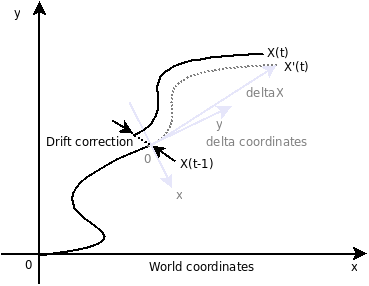
График 2
Однако следует отметить, что применение дополнительных датчиков, а именно одноосного датчика направления (NXT Compass sensor) , датчика угла (NXT angle sensor) или одноосного гироскопического датчика (NXT Gyro sensor) совместно со встроенными тахометрами, позволит модифицировать разработанный алгоритм управления для повышения точности отслеживания заданных направлений движения и координат робота.
Формирование траектории в виде замкнутой кривой линии
Одним из способов программного движения робота в помещениях может быть использование алгоритм слежения цветовым датчиком за полосой, нанесённой на поверхность пола. Как известно, эта технология навигации широко используется в задачах промышленной (складской) автоматизации.
В качестве начальной траектории был выбран прилагаемый к конструктору NXT Mindstorms вариант овального маршрута (Рис.10)
Для первичного моделирования движения робота был использован достаточно распространённый алгоритм 1 (Рис.11) попеременного подруливания обоими колёсами платформы в зигзагообразном стиле (Рис.12)
Эксперименты показывают, что цветовой сенсор, используемый в роботе, должен находиться в непосредственной близости от линии и требует специальной калибровки датчика. При этом алгоритм 1 (Рис. 11) показал остаточно высокую точность движения робота по указанной траектории даже на максимальной скорости.
Для усложнения условий эксперимента была создана программная трасса с несколькими прямыми участками и участками с резкими поворотами (Рис.13). Для создания этой траектории была применена обычная изолента чёрно цвета. Базовый алгоритм 1 позволяет роботу перемещаться по линии, но на относительно небольшой скорости. При превышении определённого порога скорости робот вылетает с трассы и затем пытается найти её заново.