

Математическое описание 6-фазного ид с общей точкой.
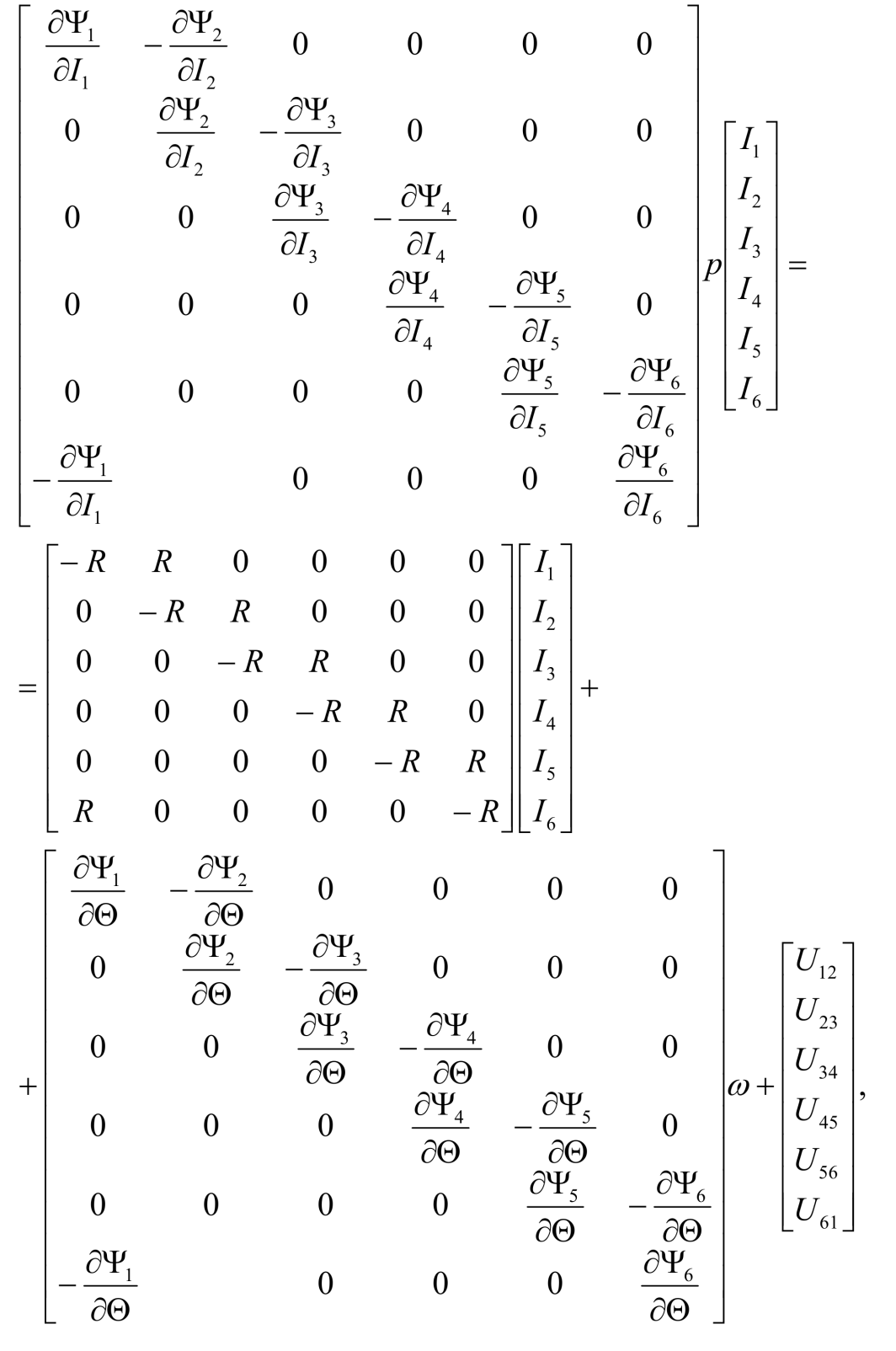
Для описания электромагнитных процессов составим шесть уравнений электрического равновесия ИД для контуров, образованных соседними (по порядковой нумерации) фазами. За положительное направление токов принимаем направление к общей точке подключения фаз. В матричной форме уравнения могут быть записаны следующим образом:
 (1.3)
(1.3)
где U12, U23...U61 — напряжения между соседними фазами ИД;
 — оператор
дифференцирования; индексами 1…6
обозначены переменные соответствующих
фаз.
— оператор
дифференцирования; индексами 1…6
обозначены переменные соответствующих
фаз.
В целях упрощения математического описания ИД дополнительно примем следующие допущения:
1) одновременно токи могут протекать только в трех фазах двигателя;
2) сумма токов, протекающих через три работающие фазы, равна нулю. При этом за положительное направление токов принимается направление к общей точке фаз, т.е. токи обмоток 1, 3, 5 верхнего плеча схемы силовой части ВИП являются положительными, а токи обмоток 2, 4, 6 нижнего плеча — отрицательными.
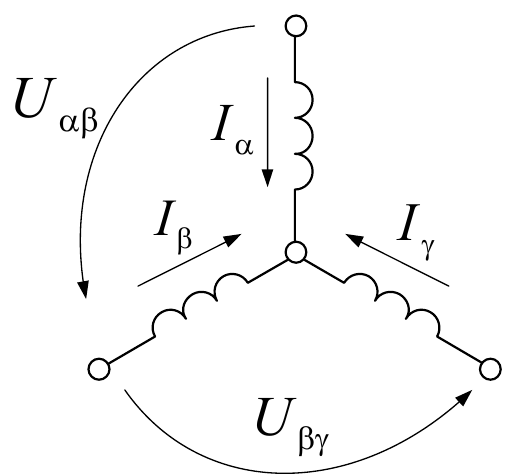
Рис. 1.9 – Эквивалентная схема 6-фазного ИД в преобразованной системе координат, связанной с проводящими фазами
Эти допущения позволяют перейти к упрощенной эквивалентной схеме питания 6-фазного ИД, представленной на рис. 1.9, и соответствующей ей расчетной системе координат (α, β, γ), которая в каждый момент времени привязана к трем проводящим фазам двигателя. Записывая уравнения электрического равновесия и преобразуя их с учетом условия Iα + Iβ + Iγ = 0 к форме Коши, получим систему дифференциальных уравнений 2-го порядка:
 (1.4)
(1.4)
Уравнение электромагнитного момента запишется в виде
M = Mα(Θα, Iα) + Mβ(Θβ, Iβ) + Mγ(Θγ, Iγ), (1.5)
где момент от одной фазы определяется в соответствии с (1.2).
Уравнения (1.4), (1.5), дополненные дифференциальными уравнениями для скорости и углового положения ротора, составляют систему уравнений, описывающих динамические процессы 6- фазного ВИП с общей точкой включения фаз.
Модель вентильно-индукторного привода аккумуляторного электровоза.
За последнее время достижения в области силовых полупроводниковых приборов позволили приступить к созданию современных приводов для электроподвижного состава. Рассмотренная ниже математическая модель позволяет на стадии проектирования оценить работу электропривода аккумуляторного электровоза для обеспечения его оптимальных тяговых характеристик в режиме пуска и буксования. При проведении расчетных исследований использовано программное обеспечение по математическому моделированию электромагнитных процессов в вентильном индукторном двигателе с учетом насыщения магнитной системы. В процессе проведения расчетных исследований зубцовая зона двигателя, площади основных сечений ярма статора и ротора не изменялись.
Общая структурная схема электромеханической системы построена с учетом источника питания ограниченной мощности.
В основу расчета переходных процессов положены уравнения электромагнитного и электромеханического равновесия в системе тягового электропривода.
Схема усилий и моментов, действующих на колеса электровоза при работе привода в режиме буксования, показана на рис. 1.

Рис. 2.1 – Схема усилий и моментов
В основу математической модели пускового режима тягового электровоза положена следующая система уравнений:

где VСК – скорость скольжения колес при буксовании; VП – скорость поезда; ∑W – суммарное сопротивление движению поезда; P – масса электровоза; Q – масса электропоезда; i – передаточное отношение; ψp – коэффициент сцепления колес с рельсами. Общее время разгона поезда составляет примерно 90 сек.
Коэффициент сцепления колес с рельсами в имитационной модели изменялся ступенчато от значения ψp1 = 0,23 до значения ψp2 = 0, 1 посредством сумматора и ступенчатого входного воздействия. Время наступления пробуксовки равно 5 с. Числовые данные поезда с вагонетками и электровозом АМ8Д: Q = 312 т – полный вес поезда; P = 14 т. – вес электровоза; wi = 1,5w0 = 1,5⋅4 = 6 Н/кН. Уклон пути принят равным i = 3 ‰.
При движении поезда
по рудничным откаточным путям коэффициент
сцепления изменяется в широких пределах.
При реализации тяговых усилий в процессе
разгона поезда в некоторых случаях
(увеличение сопротивлению движению,
снижение коэффициента сцепления и т.д.)
выполняется условие Fm
> Fсц.
Работа привода происходит в зоне
избыточного буксования. В соответствии
с
 это приведет
к увеличению ускорения скольжения и,
следовательно, к повышению потерь
энергии на буксование.
это приведет
к увеличению ускорения скольжения и,
следовательно, к повышению потерь
энергии на буксование.
В зависимости от сочетаний параметров привода электровоза и характеристики сцепления возможны установившийся или разносный режимы избыточного буксования. При разносном режиме буксования происходит автоматическое увеличение скорости буксующих колесных пар при уменьшении их нагрузки. Этот режим работы обусловливает значительную долю потерь энергии на буксование колес электровоза. Поэтому он является нежелательным.
На рис. 2.2. представлена имитационная модель аккумуляторного рудничного электровоза АМ8Д совместно с вентильно-индукторным двигателем. Математическая модель разработана при помощи программы MatLab 6.5 Release 13. Программа MatLab содержит широкий спектр типовых динамических звеньев, как линейных, так и нелинейных.
Скорость поезда вычислялась на выходе интегрирующего звена с обратной связью. На входе звена алгебраически суммировались с помощью сумматора сила сцепления колес с рельсами и суммарное сопротивление движению поезда. Суммарное сопротивление движению поезда моделировалось с помощью двух усилителей сигналов и блока ограничения сигнала.
Скорость колеса вычислялась с помощью сумматора, на входах которого алгебраически суммировались скорость скольжения и скорость поезда. Результаты представлены на рис. 2.3 – 2.5.
Рис. 2.2 – Математическая модель аккумуляторного электровоза на основе ВИД
Рис. 2.3 – Режим пуска при одинаковых пусковых условиях для двигателей: Vп – скорость поезда; Vск – скорость скольжения
Разработанная математическая модель электропривода электровоза обеспечивает оптимальные тяговые характеристики электропривода электровоза. Результаты расчета пускового и буксового режимов подтверждают, что использование ВИД в приводе электровоза позволяет эффективно использовать энергию аккумуляторной батареи при работе электровоза в зоне избыточного буксования
Рис. 2.4 – Скорость колесных пар при одинаковом коэффициенте сцепления колес с рельсами
Рис. 2.5 – Режим пуска при различных пусковых условиях для двигателей по пробуксовке колесных пар: Vп – скорость поезда; Vк1 – скорость колеса передней колесной пары; Vск1 – скорость скольжения первого двигателя; Vк2 – скорость колеса задней колесной пары; Vск2 – скорость скольжения второго двигателя.