

Особенности конструкции индукторной машины.
ИМ, входящая в состав ВИП, может иметь различные конструктивные исполнения. На рис. 1.2 в качестве примера приведено поперечное сечение 4-фазной ИМ конфигурации 8/6. При обозначении конфигурации ИМ первая цифра указывает число пар полюсов статора, вторая — ротора.
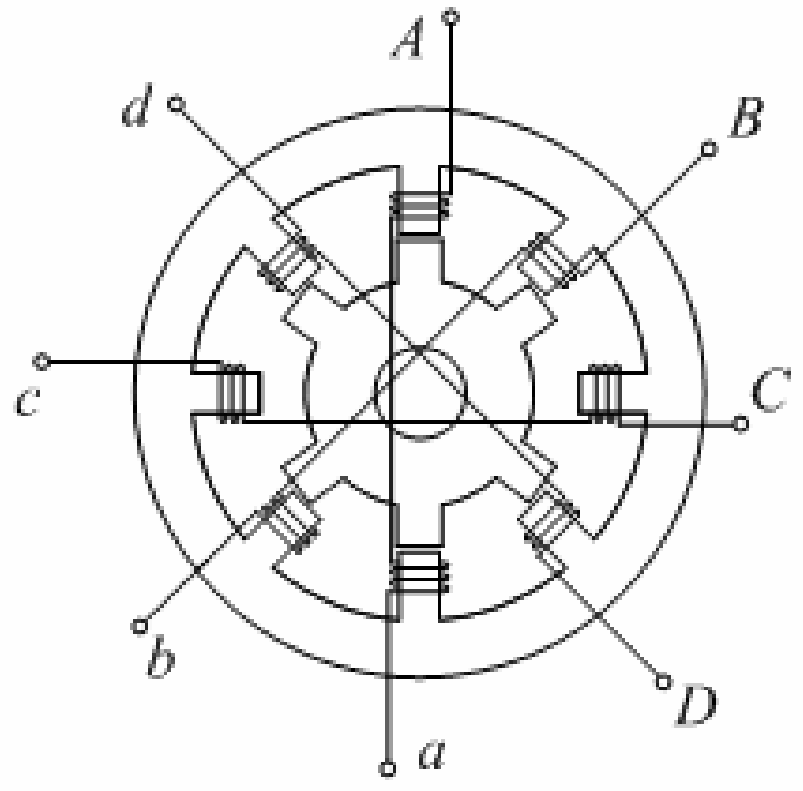
Рис. 1.2 – Поперечное сечение 4- фазной ИМ конфигурации 8/6
Анализ рис. 1.2 показывает, что ИМ имеет следующие конструктивные особенности:
- сердечники статора и ротора имеют явнополюсную структуру;
- число пар полюсов относительно невелико, при этом число полюсов статора больше числа полюсов ротора;
- сердечники статора и ротора выполняются шихтованными;
- обмотка статора сосредоточенная катушечная. Она может быть одно- или многофазной;
- фаза ИМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора. Известны ИМ с удвоенным числом полюсов статора и ротора. Такие электрические машины в 4-фазном исполнении имеют конфигурацию 16/12. Фаза такой ИМ состоит из двух пар катушек, которые располагаются на полюсах статора таким образом, что их оси ортогональны;
- катушки фазы могут быть соединены в электрическом отношении параллельно или последовательно, в магнитном — согласно или встречно;
- обмотка на роторе ИМ отсутствует.
На рис. 1.3 приведены ИД различной конфигурации.

Рис. 1.3 – Различные конфигурации ИМ: а — однофазная ИМ конфигурации 2/2; б — двухфазная ИМ конфигурации 4/4; в — трехфазная ИМ конфигурации 6/4; г — четырехфазная ИМ конфигурации 8/6
Конструктивно ИМ, преобразователь частоты и система управления в ВИП могут быть выполнены раздельно. При этом в процессе работы они могут находиться на достаточно большом расстоянии.
При интегральном исполнении преобразователя частоты и ИМ в ВИП оно оказывается более выгодным по сравнению с частотно-управляемым асинхронным приводом (рис. 1.4). Дело в том, что в отличие от асинхронной, фазы индукторной машины электрически не связаны между собой. Таким образом, если для соединения 3-фазного асинхронного двигателя с преобразователем частоты требуется три провода, то для 3-фазной индукторной машины – шесть. Очевидно, что увеличение числа фаз ведет к увеличению числа соединительных проводов.
Следовательно, интегральное исполнение ВИД позволяет существенно снизить расход соединения проводов или кабелей.

Рис. 1.4 – Схема соединения электрической машины и преобразователя частоты: а— в частотно-регулируемом асинхронном электроприводе; б — в ВИП
Принцип действия вип.
Принцип действия ВИД основан на свойстве ферромагнитных тел ориентироваться во внешнем магнитном поле таким образом, чтобы пронизывающий их магнитный поток принимал максимальное значение.
Рассмотрим принцип действия ВИД на примере 4-фазного двигателя конфигурации 8/6. На рис. 1.5,а показано рассогласованное взаимное положение сердечников статора и ротора для фазы А этого двигателя.
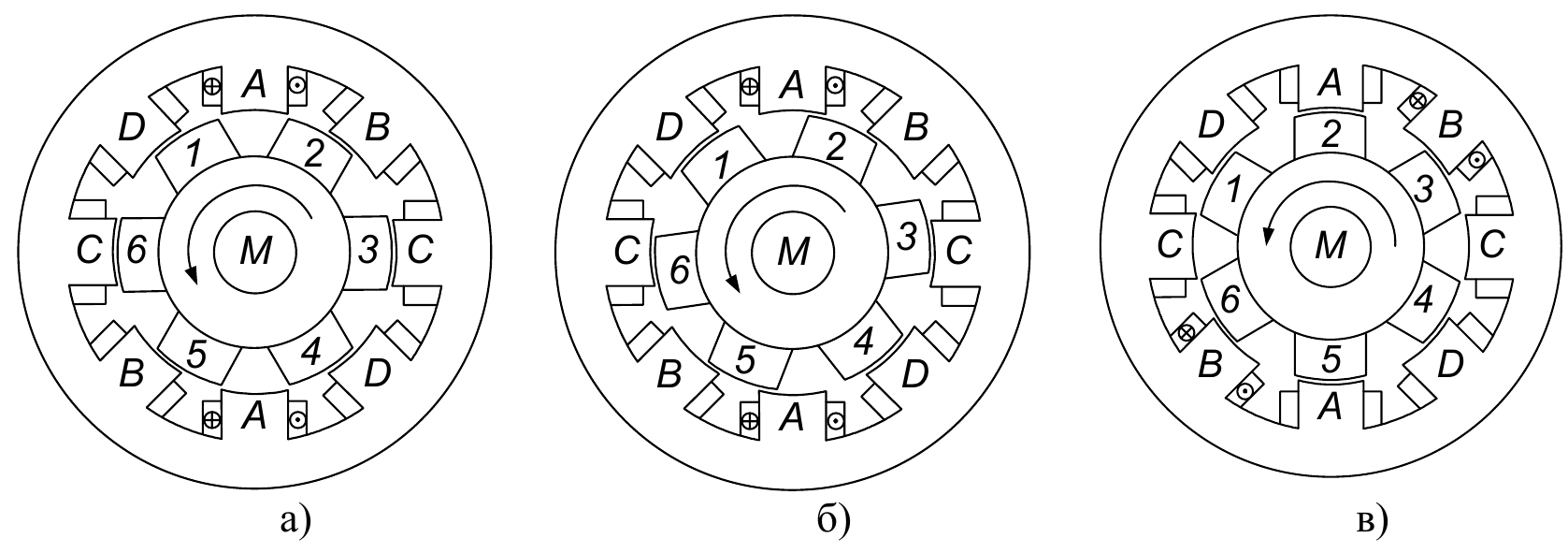
Рис. 1.5 – К пояснению принципа действия ВИД:
а — рассогласованное положение сердечников для фазы А;
б — промежуточное положение сердечников для фазы А;
в — согласованное положение сердечников для фазы А
Рассогласованным положением сердечников статора и ротора для некоторой фазы ВИД называется такое положение, при котором ось этой фазы совпадает с одной из осей q ротора, то есть зубцы фазы располагаются строго напротив пазов ротора. Это положение характеризуется минимальным значением индуктивности фазы и магнитного потока, сцепленного с ней, что объясняется максимальным значением магнитного сопротивления воздушного зазора между сердечниками. В теории ВИП рассогласованное положение одной из фаз принимается за начало отсчета углового положения сердечников статора и ротора. В рамках данного пособия за начало отсчета примем рассогласованное положение фазы А.
Предположим, что в рассогласованном положении по сигналу системы управления произойдет коммутация ключей преобразователя частоты и к фазе А будет приложено постоянное напряжение UA , тогда по катушкам фазы потечет ток IA , который создаст МДС FA. Эта МДС, в свою очередь, возбудит в машине магнитное поле.
В магнитном поле фазы А ротор будет стремиться ориентироваться в нем таким образом, чтобы магнитный поток, пронизывающий его, принял максимальное значение. При этом на сердечнике статора и ротора будет действовать одинаковые по значению и обратные по направлению пондеромоторные силы (ПС) тяжения. Очевидно, что силы, действующие на 1-й и 4-й зубцы ротора, будут стремиться повернуть его по часовой стрелке, а силы, действующие на 2-й и 5-й зубцы — против часовой стрелки. В силу того, что ротор в данном положении симметричен относительно оси возбужденной фазы, равнодействующая тангенциальной составляющей этих сил будет равна нулю. Таким образом, в рассогласованном положении ИД не развивает вращающего момента.
Рассогласованное положение представляет собой точку неустойчивого равновесия. Действительно, если под действием какого-либо внешнего воздействия ротор отклонится от рассогласованного положения в том или ином направлении, то равнодействующая азимутальных составляющих ПС сердечников уже не будет равна нулю, следовательно, возникнет вращающий момент, который будет стремиться повернуть ротор в направлении от рассогласованного положения.
Возьмем другое положение ротора, показанное на рис. 1.5,б. Здесь фаза А имеет большие потокосцепление и индуктивность, чем в рассогласованном положении, что объясняется меньшей величиной воздушного зазора между сердечниками. При этом равнодействующая азимутальных составляющих ПС сердечников отлична от нуля, и созданный ею электромагнитный момент стремится повернуть ротор ИД против часовой стрелки.
Вращение ротора будет продолжаться до тех пор, пока он не займет положение, показанное на рис.1.5,в. Оно называется согласованным положением фазы А.
Согласованным положением сердечников статора и ротора ИД для какой-либо фазы называется такое положение, при котором ось этой фазы совпадает с одной из осей d ротора, то есть зубцы фазы располагается строго напротив полюсов ротора. Согласованное положение характеризуется максимальным значением индуктивности фазы и сцепленного с ней магнитного потока, что объясняется минимальной величиной магнитного сопротивления воздушного зазора между сердечниками.
В согласованном положении ПС притяжения сердечников имеют только радиальные составляющие. В силу чего вращающий момент ВИД в этом положении равен нулю.
Согласованное положение представляет собой точку устойчивого равновесия. Действительно, если под действием какой-либо внешней силы ротор отклонится от согласованного положения в ту или иную сторону, то возникший электромагнитный момент будет стремиться вернуть его в согласованное положение.
Для обеспечения однонаправленного вращения ротора необходимо еще до наступления согласованного положения фазы А осуществить коммутацию ключей преобразователя частоты, в результате которой фаза А должна быть отсоединена от источника питания, а фаза, момент которой стремится продолжить вращение ротора в прежнем направлении, подключена к нему. В данном случае это фаза В.
Взаимоположение сердечников статора и ротора, близкое к согласованному положению для фазы А, является для фазы В близким к рассогласованному положению, то есть при подаче на нее напряжения и протекании по ее катушкам тока возникает отличный от нуля вращающий момент, который будет стремиться повернуть ротор против часовой стрелки.
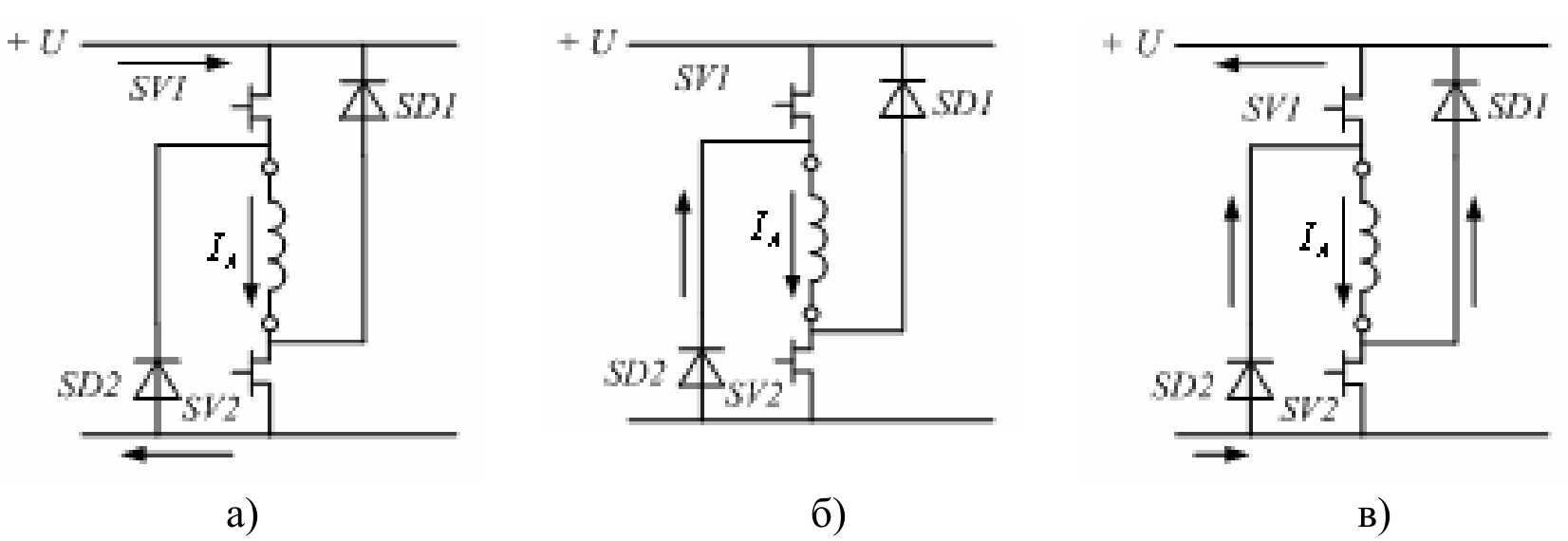
Рис. 1.6 – Контуры замыкания тока в фазе ВИД на интервале коммутации:
а — ключи SV1,SV2 замкнуты; б — ключ SV1 разомкнут, SV2 замкнут;
в — ключи SV1,SV2 разомкнуты, к фазе приложено обратное напряжение
Необходимость коммутации фаз еще до достижения согласованного положения сердечников диктуется желанием получить как можно меньшее значение тока в отключенной фазе при достижении ее согласованного положения. Дело в том, что после отключения фазы накопленная в ней энергия магнитного поля не может исчезнуть мгновенно. Она расходуется на поддержание постоянства потокосцепления фазы, в силу чего в ней возникает ЭДС самоиндукции, ток фазы остается отличным от нуля еще некоторое время после ее коммутации. Он замыкается через встречно включенный диод VD2, ключ SV2 преобразователя частоты и питающую сеть (рис. 1.6,б). В конечном итоге ток достигнет нулевого значения (энергия магнитного поля выделится в виде электрических потерь на активных сопротивлениях фазы, встречно включенного диода и ключа). Однако если этот ток будет отличен от нуля в согласованном положении фазы, то при дальнейшем вращении ротора созданное им магнитное поле приведет к возникновению тормозного момента. В целях более быстрого гашения поля в ВИД после отключения фазы на нее подают напряжение обратной полярности (рис. 1.6,в).
Фаза В будет находиться под напряжением до тех пор, пока ротор не достигнет положения, близкого к согласованному. При достижении этого положения от ДПР в систему управления поступит соответствующий сигнал, обработка которого приведет к выдаче управляющего воздействия на преобразователь частоты и переключению фаз В и С. Цикл повторится.
Таким образом, проводя последовательную коммутацию фаз, можно осуществить однонаправленное вращение ротора ВИД. Последовательность коммутации фаз определяется алгоритмом, заложенным в систему управления. Исходными данными для ее работы являются сигналы положения ротора, поступающие от ДПР, что исключает возможность неправильной коммутации фаз.